本发明涉及水上运动设备,特别是涉及一种冲浪板运动速度计算方法、落水检测方法。
背景技术:
1、现有技术中,对电动冲浪板的运行速度的计算一般是通过计算电机的转速来换算冲浪板的运行速度。然而,在水下有浪或是别的因素导致冲浪板存在较大的阻力时,通过电机的转速来换算冲浪板运行速度的方法准确度较低。
2、而且,现有技术中,冲浪人员落水也无法检测。
技术实现思路
1、本发明的目的是克服现有技术中的不足之处,提供一种冲浪板运动速度计算方法、落水检测方法,提高冲浪板的运动速度准确度,并实现落水检测。
2、本发明的目的是通过以下技术方案来实现的:
3、本发明一方面公开一种冲浪板运动速度计算方法,包括:
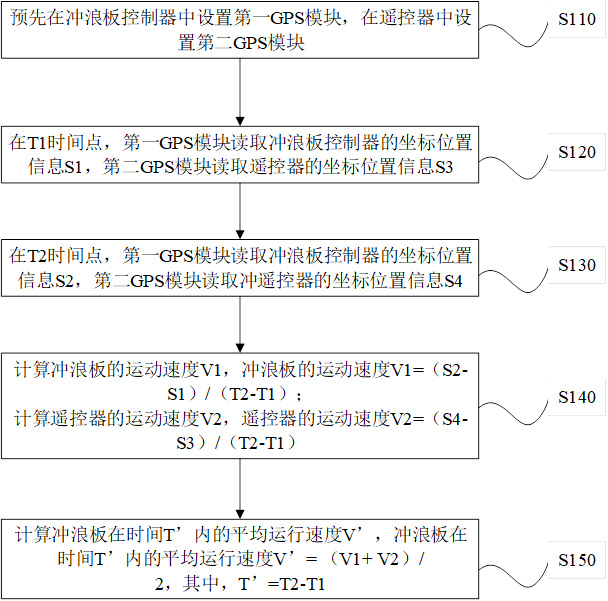
4、预先在冲浪板控制器中设置第一gps模块,在遥控器中设置第二gps模块;
5、第一gps模块在t1时间点读取冲浪板控制器的坐标位置信息s1,在t2时间点读取冲浪板控制器的坐标位置信息s2;
6、计算冲浪板的运动速度v1,所述冲浪板的运动速度v1=(s2-s1)/(t2-t1);
7、第二gps模块在t1时间点读取遥控器的坐标位置信息s3,在t2时间点读取冲遥控器的坐标位置信息s4;
8、计算遥控器的运动速度v2,所述遥控器的运动速度v2=(s4-s3)/(t2-t1);
9、计算冲浪板在时间t’内的平均运行速度v’,所述冲浪板在时间t’内的平均运行速度v’= (v1+ v2)/2,其中,t’=t2-t1。
10、在其中一个实施例中,所述遥控器设置有处理器;所述冲浪板控制器在t1时间点读取冲浪板控制器的坐标位置信息s1、在t2时间点读取冲浪板控制器的坐标位置信息s2,并将t1时间点及其对应的位置信息s1及t2时间点对应的位置信息s2通过蓝牙传输方式传输给所述处理器;
11、所述处理器根据所述冲浪板控制器的时间信息和坐标信息计算冲浪板的运动速度v1;
12、所述处理器根据所述遥控器的时间信息和坐标信息计算遥控器的运动速度v2;
13、所述处理器根据所述冲浪板的运动速度v1及所述遥控器的运动速度v2计算冲浪板在时间t2-t1内的平均运行速度v’= (v1+ v2)/2。
14、在其中一个实施例中,所述冲浪板控制器将时间点t1及其对应的坐标位置信息s1、时间点t2及其对应的坐标位置信息s2通过蓝牙2.4g信号传输给所述处理器。
15、本发明另一方面公开一种冲浪落水检测方法,包括:
16、预先在冲浪板控制器中设置第一gps模块,在遥控器中设置第二gps模块;
17、第一gps模块在t1时间点读取冲浪板控制器的坐标位置信息s1,第二gps模块在t1时间点读取遥控器的坐标位置信息s3;
18、判断冲浪板控制器的坐标位置信息s1与遥控器的坐标位置信息s3的距离是否超过预设的安全距离阈值;
19、若冲浪板控制器的坐标位置信息s1与遥控器的坐标位置信息s3的距离超过预设的安全距离阈值,则判断为冲浪人员落水。
20、在其中一个实施例中,所述遥控器设置有处理器;所述冲浪板控制器在t1时间点读取冲浪板控制器的坐标位置信息s1并将t1时间点及其对应的位置信息s1通过蓝牙传输方式传输给所述处理器;
21、所述处理器判断冲浪板控制器的坐标位置信息s1与遥控器的坐标位置信息s3的距离是否超过预设的安全距离阈值;
22、若冲浪板控制器的坐标位置信息s1与遥控器的坐标位置信息s3的距离超过预设的安全距离阈值,则判断为冲浪人员落水。
23、在其中一个实施例中,所述冲浪板控制器将时间点t1及其对应的坐标位置信息s1通过蓝牙2.4g信号传输给所述处理器。
24、在其中一个实施例中,若判断出冲浪人员落水,则关停冲浪板。
25、在其中一个实施例中,在判断出冲浪人员落水,则关停冲浪板的步骤之后,还包括:
26、第一gps模块在t3时间点读取冲浪板控制器的坐标位置信息s4,第二gps模块在t3时间点读取遥控器的坐标位置信息s5;
27、判断冲浪板控制器的坐标位置信息s4与遥控器的坐标位置信息s5的距离是否超过预设的安全距离阈值;
28、若冲浪板控制器的坐标位置信息s4与遥控器的坐标位置信息s5的距离在预设的安全距离阈值内,则重新启动冲浪板。
29、在其中一个实施例中,若判断出冲浪人员落水,在关停冲浪板步骤之前还包括将冲浪板的油门设置为无效状态的步骤。
30、在其中一个实施例中,述关停冲浪板的步骤具体为:所述遥控器和所述冲浪板控制器自动关机。
31、本发明公开的冲浪板运动速度计算方法、冲浪落水检测方法,提高冲浪板的运动速度准确度,并实现落水检测。
技术特征:1.一种冲浪板运动速度计算方法,其特征在于,包括:
2.根据权利要求1所述的冲浪板运动速度计算方法,其特征在于,所述遥控器设置有处理器;所述冲浪板控制器在t1时间点读取冲浪板控制器的坐标位置信息s1、在t2时间点读取冲浪板控制器的坐标位置信息s2,并将t1时间点及其对应的位置信息s1及t2时间点对应的位置信息s2通过蓝牙传输方式传输给所述处理器;
3.根据权利要求2所述的冲浪板运动速度计算方法,其特征在于,所述冲浪板控制器将时间点t1及其对应的坐标位置信息s1、时间点t2及其对应的坐标位置信息s2通过蓝牙2.4g信号传输给所述处理器。
4.一种冲浪落水检测方法,其特征在于,包括:
5.根据权利要求4所述的冲浪落水检测方法,其特征在于,所述遥控器设置有处理器;所述冲浪板控制器在t1时间点读取冲浪板控制器的坐标位置信息s1并将t1时间点及其对应的位置信息s1通过蓝牙传输方式传输给所述处理器;
6.根据权利要求5所述的冲浪落水检测方法,其特征在于,所述冲浪板控制器将时间点t1及其对应的坐标位置信息s1通过蓝牙2.4g信号传输给所述处理器。
7.根据权利要求6所述的冲浪落水检测方法,其特征在于,若判断出冲浪人员落水,则关停冲浪板。
8.根据权利要求7所述的冲浪落水检测方法,其特征在于,在判断出冲浪人员落水,则关停冲浪板的步骤之后,还包括:
9.根据权利要求6所述的冲浪落水检测方法,其特征在于,若判断出冲浪人员落水,在关停冲浪板步骤之前还包括将冲浪板的油门设置为无效状态的步骤。
10.根据权利要求7所述的冲浪落水检测方法,其特征在于,所述关停冲浪板的步骤具体为:所述遥控器和所述冲浪板控制器自动关机。
技术总结本发明涉及冲浪板运动速度计算方法、落水检测方法。冲浪板运动速度计算方法,包括:第一GPS模块在T1时间点读取冲浪板控制器的坐标位置信息S1,在T2时间点读取冲浪板控制器的坐标位置信息S2;计算冲浪板的运动速度V1;第二GPS模块在T1时间点读取遥控器的坐标位置信息S3,在T2时间点读取冲遥控器的坐标位置信息S4;计算遥控器的运动速度V2;计算冲浪板在时间T’内的平均运行速度V’,V’=(V1+V2)/2,其中,T’=T2‑T1。本发明公开的冲浪板运动速度计算方法、落水检测方法,提高冲浪板的运动速度准确度,并实现落水检测。
技术研发人员:陈阳晋,杨俊杰,李勇,张捷
受保护的技术使用者:深圳市好盈科技股份有限公司
技术研发日:技术公布日:2024/3/21