操作UWB雷达装置的方法与流程
本公开涉及一种操作uwb雷达装置的方法。此外,本公开涉及一种uwb雷达装置。此外,本公开涉及一种用于实行所提出的方法的计算机实施的方法。
背景技术:
1、us2022/0116088 a1公开了使用超宽带(uwb)信号的毫米波频带中的发射天线波束的对准。
2、us2016/0118716 a1公开了用于通信的系统和方法,并且尤其是涉及用于波束对准的系统和方法。
3、us11,265,072b2公开了一种无线通信系统、一种用于基于无线通信系统中的位置信息进行波束对准的设备和方法。
技术实现思路
1、根据本公开的第一方面,提供一种操作uwb雷达装置的方法,包括以下步骤:
2、-确定至少一个uwb目标装置相对于所述uwb雷达装置的定位信息,且基于所确定的定位信息;
3、-将所述uwb雷达装置切换为雷达模式,其中在所述雷达模式中所述uwb雷达装置的波束与所述至少一个uwb目标装置的对准是通过使用所述定位信息完成的。
4、根据另外的方面,提供了一种uwb雷达装置,包括:
5、-天线阵列;
6、-定位元件,其功能性地连接到所述天线阵列以用于获得至少一个uwb目标装置的定位信息;以及
7、初始化元件,其功能性地连接到所述定位元件以用于通过使用所确定的定位信息将所述uwb雷达装置切换为雷达模式。
8、根据另外的方面,提供一种计算机实施的方法,包括可执行指令,所述可执行指令当由uwb雷达装置执行时使得所述uwb雷达装置实行所提出的方法。
9、根据实施例,在uwb雷达装置的测距模式中获得uwb雷达装置与至少一个uwb目标装置之间的角度和距离。所述手段实施于uwb芯片上,使得uwb雷达装置可易于在两个手段中驱动。
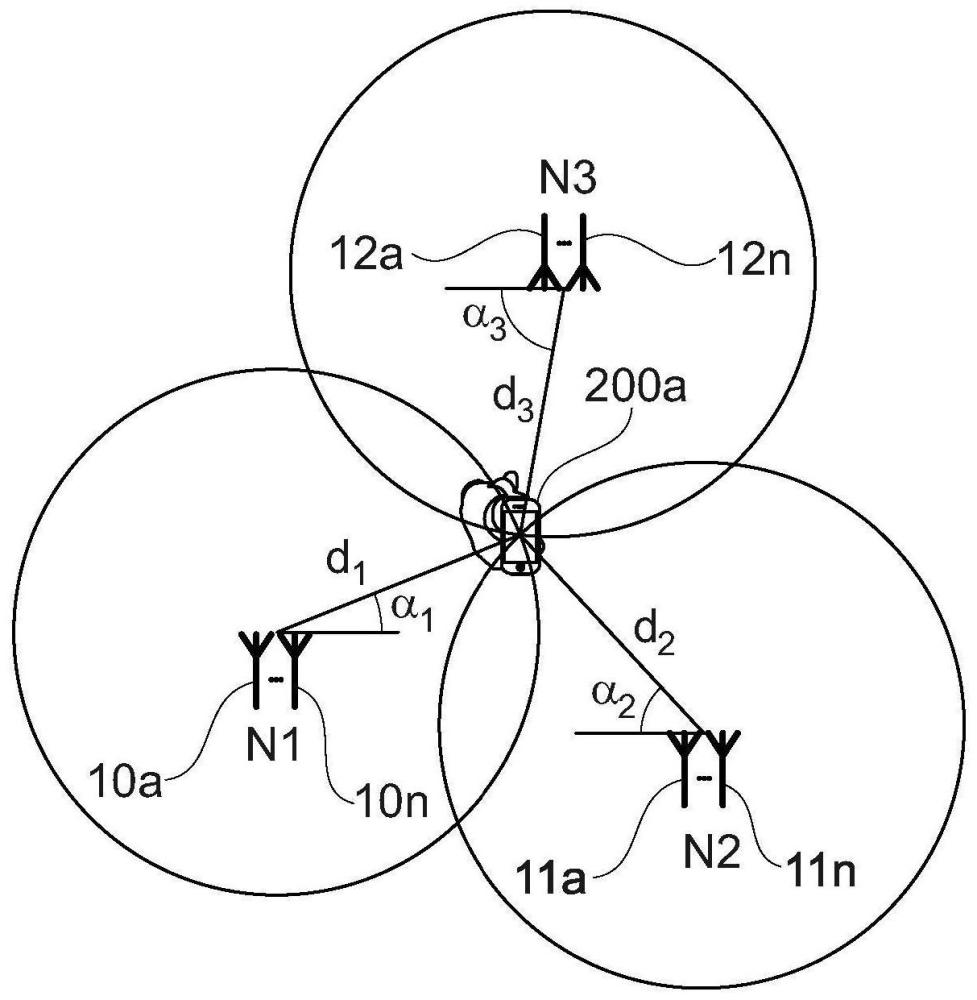
10、根据另外的实施例,多个uwb雷达装置正在与所述至少一个uwb目标装置执行测距。以此方式,通过确定多个距离来执行多锚模式。
11、根据另外的实施例,uwb雷达装置在已确定其定位信息之后在所述雷达模式中将其雷达波束引导到所限定的uwb目标装置。以此方式,可进行对指定目标的跟踪。
12、根据另外的实施例,多个uwb雷达装置循序地实行所述测距模式和所述雷达模式。以此方式,帧的持续时间和用于测距的帧的数目可优化,且因此可非常精确地完成测距。
13、根据另外的实施例,多个uwb雷达装置并行地实行所述测距模式和所述雷达模式。
14、根据另外的实施例,通过测量到达角度来确定所述定位信息。uwb芯片支持此操作模式,因此实现确定角度的替代方式。
15、根据另外的实施例,执行双侧双向测距模式dstwr。以此方式,交换三个帧并且组合六个时间戳。以此方式,可甚至更精确地完成对距离的确定。
16、根据另外的实施例,实行带外通信模式以便确定uwb目标装置是否意图建立到uwb雷达装置的连接,其中在带外通信模式中在所述uwb雷达装置与所述至少一个uwb目标装置之间交换配置数据。通常,所述雷达模式在带内执行(例如,在6.5ghz的信道5上使用uwb),而通信可以在带外执行(例如,在2.4ghz下使用蓝牙)。
17、根据另外的实施例,在所述带外通信模式中产生时间戳,所述uwb雷达装置的所述测距模式基于所述时间戳。以此方式,提供建立所述uwb装置之间的连接的替代方式。
技术特征:
1.一种操作uwb雷达装置(100a…100n)的方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的方法,其特征在于,在所述uwb雷达装置(100a…100n)的测距模式中获得所述uwb雷达装置(100a…100n)与所述至少一个uwb目标装置(200a…200n)之间的角度和距离。
3.根据权利要求2所述的方法,其特征在于,多个uwb雷达装置(100a…100n)正在与所述至少一个uwb目标装置(200a…200n)执行测距。
4.根据权利要求3所述的方法,其特征在于,所述uwb雷达装置(100a…100n)在已确定其定位信息之后在所述雷达模式中将其雷达波束引导到所限定的uwb目标装置(200a…200n)。
5.根据权利要求3或4所述的方法,其特征在于,所述多个uwb雷达装置(100a…100n)循序地实行所述测距模式和所述雷达模式。
6.根据权利要求3或4所述的方法,其特征在于,所述多个uwb雷达装置(100a…100n)并行地实行所述测距模式和所述雷达模式。
7.根据在前的任一项权利要求所述的方法,其特征在于,通过测量到达角度来确定所述定位信息。
8.根据权利要求2至7中任一项所述的方法,其特征在于,执行双侧双向测距模式dstwr。
9.一种uwb雷达装置(100a…100n),其特征在于,包括:
10.一种包括可执行指令的计算机实施的方法,其特征在于,所述可执行指令在由uwb雷达装置(100a…100n)执行时使所述uwb雷达装置(100a…100n)实行根据权利要求1至8中任一项所述的方法。
技术总结
本发明涉及操作UWB雷达装置(100a…100n)的方法,包括以下步骤:确定至少一个UWB目标装置(200a…200n)相对于所述UWB雷达装置(100a…100n)的定位信息,且基于所确定的定位信息;将所述UWB雷达装置(100a…100n)切换为雷达模式,其中在所述雷达模式中所述UWB雷达装置(100a…100n)的波束与所述至少一个UWB目标装置(200a…200n)的对准是通过使用所述定位信息完成的。
技术研发人员:斯特凡·泰尔蒂内克
受保护的技术使用者:恩智浦有限公司
技术研发日:
技术公布日:2024/6/18
- 还没有人留言评论。精彩留言会获得点赞!