低空无人机路径规划方法、装置、无人机及可读存储介质与流程
本发明涉及无人机领域,具体而言,涉及一种低空无人机路径规划方法、装置、无人机及可读存储介质。
背景技术:
1、如今,城市低空系统的高效运行对城市的经济发展和居民的生活水平至关重要,作为智能低空体系的重要组成部分,无人机低空以其高效、快捷的特点受到越来越多的关注和重视。其中,无人机支线运输和末端配送已经成为无人机低空的主要形式,与传统的交通工具相比,无人机具有更大的灵活性、更低的成本,并可以快速到达目的地。
2、其中,算法设计是城市低空无人机路径规划的核心,主流的路径规划智能算法有遗传算法、a*算法、蚁群算法、粒子群算法等。
3、但是目前对城市低空无人机配送路径规划的问题的研究相对较少,低空无人机配送的时效性和安全性是最基础的保障,因此,如何考虑低空无人机在低空空域内飞行时各方面的影响,从而有效分析并解决低空无人机配送路径规划方面的几个根本问题是当下推进智慧低空发展核心点。
4、当下低空无人机物流配送的研究中多采用a*算法进行路径规划,但是基于传统的a*算法进行低空无人机的路径规划存在算法搜索效率低,收敛精度差等问题。
技术实现思路
1、本发明的目的在于提供一种低空无人机路径规划方法、装置、无人机及可读存储介质,以改善现有技术存在的问题。
2、本发明的实施例可以这样实现:
3、第一方面,本发明提供一种低空无人机路径规划方法,包括:
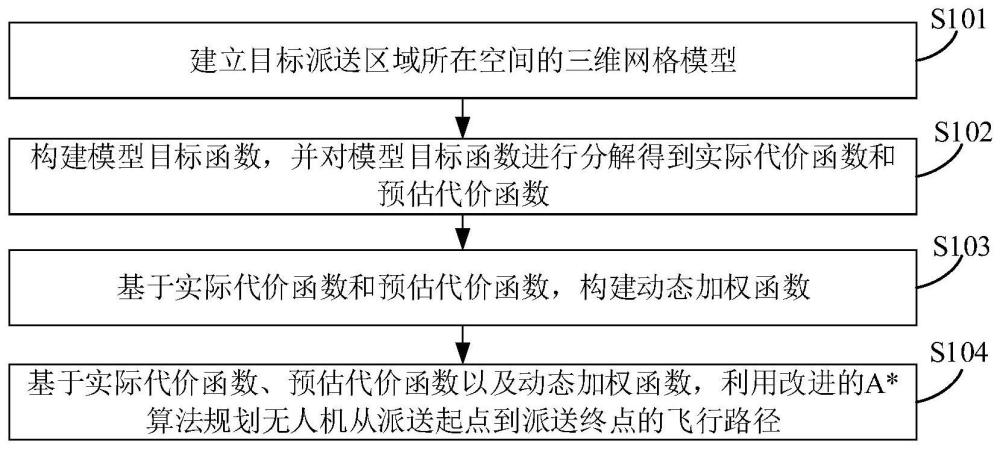
4、建立目标派送区域所在空间的三维网格模型,所述三维网格模型包括若干立体栅格;
5、构建模型目标函数,并对所述模型目标函数进行分解得到实际代价函数和预估代价函数;
6、基于所述实际代价函数和所述预估代价函数,构建动态加权函数;
7、基于所述实际代价函数、所述预估代价函数以及所述动态加权函数,利用改进的a*算法规划无人机从派送起点到派送终点的飞行路径;在路径搜索的过程中,所述动态加权函数用于对所述预估代价函数进行动态加权,以逐渐减小所述预估代价函数的影响。
8、第二方面,本发明提供一种低空无人机路径规划装置,包括:
9、分割模块,用于建立目标派送区域所在空间的三维网格模型,所述三维网格模型包括若干立体栅格;
10、建模模块,用于:构建模型目标函数,并对所述模型目标函数进行分解得到实际代价函数和预估代价函数;基于所述实际代价函数和所述预估代价函数,构建动态加权函数;
11、搜索模块,用于基于所述实际代价函数、所述预估代价函数以及所述动态加权函数,利用改进的a*算法规划无人机从派送起点到派送终点的飞行路径;在路径搜索的过程中,所述动态加权函数用于对所述预估代价函数进行动态加权,以逐渐减小所述预估代价函数的影响。
12、第三方面,本发明提供一种无人机,包括:存储器和处理器,所述存储器存储有软件程序,当所述电子设备运行时所述处理器执行所述软件程序以实现如前述第一方面所述的低空无人机路径规划方法。
13、第四方面,本发明提供一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现前述第一方面所述的低空无人机路径规划方法。
14、与现有技术相比,本发明实施例提供了一种低空无人机路径规划方法、装置、无人机及可读存储介质,通过建立目标派送区域所在空间的三维网格模型,然后构建模型目标函数,并对模型目标函数进行分解得到实际代价函数和预估代价函数;接着基于实际代价函数和预估代价函数,构建动态加权函数;最后基于实际代价函数、预估代价函数以及动态加权函数,利用改进的a*算法规划无人机从派送起点到派送终点的飞行路径。通过在原始的a*算法中加入动态加权函数,使得在路径搜索的过程中,利用动态加权函数来对预估代价函数进行动态加权,以逐渐减小预估代价函数的影响,在提升算法搜索效率的同时,不影响算法收敛的精确度。
技术特征:
1.一种低空无人机路径规划方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述构建模型目标函数,并对所述模型目标函数进行分解得到实际代价函数和预估代价函数的步骤,包括:
3.根据权利要求2所述的方法,其特征在于,基于所述实际代价函数、所述预估代价函数以及所述动态加权函数,利用改进的a*算法规划无人机从派送起点到派送终点的飞行路径的飞行路径的步骤,包括:
4.根据权利要求3所述的方法,其特征在于,所述基于所述实际代价函数、所述预估代价函数以及所述动态加权函数,计算每个所述相邻立体栅格对应的飞行总代价的步骤,包括:
5.根据权利要求4所述的方法,其特征在于,所述航程代价函数的表达式为:
6.根据权利要求5所述的方法,其特征在于,所述实际代价函数的表达式为:
7.根据权利要求6所述的方法,其特征在于,所述改进的a*算法的总代价函数的表达式为:
8.一种低空无人机路径规划装置,其特征在于,包括:
9.一种无人机,其特征在于,包括:存储器和处理器,所述存储器存储有软件程序,当所述电子设备运行时所述处理器执行所述软件程序以实现如权利要求1-7中任一项所述的低空无人机路径规划方法。
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现权利要求1-7中任一项所述的低空无人机路径规划方法。
技术总结
本发明提供了一种低空无人机路径规划方法、装置、无人机及可读存储介质,先对目标派送区域进行栅格化处理,再基于航程、高度和危险这三方面代价建立符合无人机多目标路径规划的模型目标函数和约束条件。针对传统的A*算法只能沿着栅格的中心点寻找路径从而导致路径不平滑的问题,利用引入动态加权函数的改进A*算法规划无人机从派送起点到派送终点的飞行路径。通过在原始的A*算法中加入动态加权函数,使得在路径搜索的过程中,利用动态加权函数来对预估代价函数进行动态加权,以逐渐减小预估代价函数的影响,在提升算法搜索效率的同时,不影响算法收敛的精确度。而模型目标函数的建立考虑了多方面的约束,使得最终的飞行路径也更为的平滑准确。
技术研发人员:刘刚,金晨,疏利生,童楚,卜丽娜
受保护的技术使用者:浙江省交通运输科学研究院
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!