一种深海环境下的拖线阵被动探测数据模拟方法与流程
本发明涉及被动声纳水下目标探测,具体领域为一种深海环境下的拖线阵被动探测数据模拟方法。
背景技术:
1、声纳信号处理算法研究和声纳设备设计需要不同环境下的基阵数据作为研究基础,而声纳探测海上试验成本高、花费大量人力物力,尤其是深海海域试验,且一次实验仅能获得某一特定海域、特定环境和工作状态下的试验数据。为了在实验室环境下仿真生成不同环境、不同工况、不同声纳设备参数下的基阵接收信号,开展声纳基阵数据准确模拟方法研究具有重要意义。
2、传统声纳基阵数据模拟基于均匀介质的平面波传播假设,不能反映出真实的海洋环境下的信号传播特性,随后研究人员提出了基于简正波声场计算模型的声纳基阵数据模拟方法,该方法能够在给定海洋环境参数、目标参数条件下,模拟浅海信道中的声传播特性,并加入指定源级的噪声背景。然而,对于深海环境下工作的拖曳线列阵,拖船干扰和背景噪声是影响声纳检测性能的两个重要因素,深海环境下拖船干扰通过直达路径和一次海底反射路径到达,分别在0~20°和70°~80°方位范围内形成干扰,其到达方位与拖曳阵放缆长度有关,拖曳阵背景噪声包括流噪声和海洋环境背景噪声,流噪声谱级与拖曳速度有关,同时,放缆长度和拖曳速度共同决定基阵工作深度,而现有方法未能充分考虑放缆长度、拖曳速度等参数对拖曳阵基阵数据模拟的综合影响。
技术实现思路
1、针对现有技术存在的不足,本发明的目的在于提供一种深海环境下的拖线阵被动探测数据模拟方法。
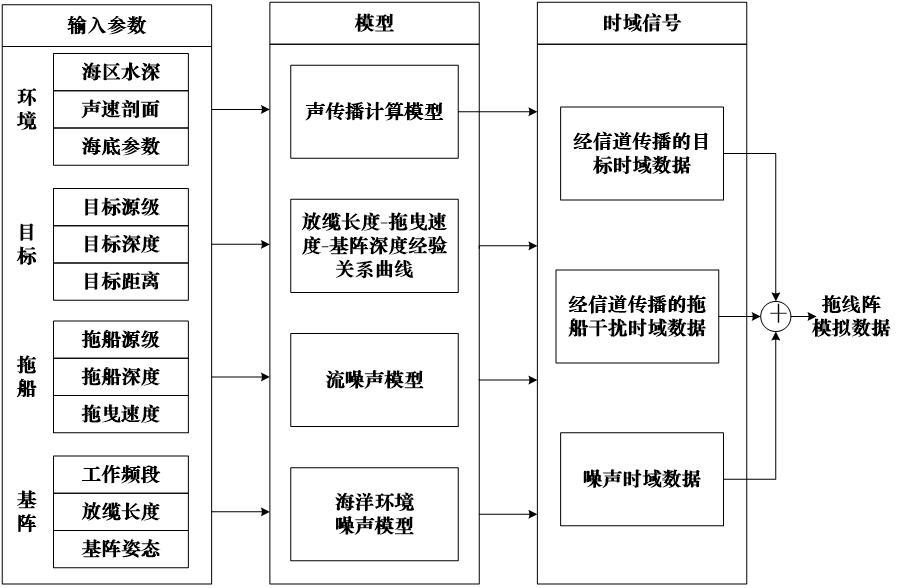
2、为实现上述目的,本发明提供如下技术方案:一种深海环境下的拖线阵被动探测数据模拟方法,其步骤为:
3、(1)根据放缆长度-拖曳速度-基阵深度关系曲线,计算出给定放缆长度和拖曳速度下的基阵工作深度;
4、(2)在确定的海洋环境参数、目标参数、拖船参数、拖曳阵参数条件下,利用bellhop声传播计算软件获得基阵接收目标时域信号和拖船干扰时域信号;
5、(3)然后在确定的放缆长度、拖曳速度、基阵深度条件下,利用流噪声数值模型和海洋环境噪声数值模型得到流噪声和海洋环境噪声谱级,进一步得到背景噪声时域信号;
6、(4)最后对目标信号、拖船干扰、背景噪声时域信号求和得到模拟的拖曳阵基阵时域数据。
7、在其中一些实施例中,根据步骤(1)和(2),计算经信道传播的目标信号ptarget(t),其具体步骤为:
8、①由放缆长度-拖曳速度-基阵深度经验关系曲线,计算给定放缆长度和拖曳速度下的接收深度,作为传感器接收深度;
9、②对于确定的海洋传播条件、目标深度、目标相对传感器的距离、接收深度,利用声场建模软件bellhop计算得到声纳工作频段下的目标与传感器之间的信道传递函数htarget(f);
10、③计算传感器接收目标频域信号ptarget(f)=sltarget(f)·htarget(f),其中sltarget(f)为目标信号频谱;
11、④通过逆傅里叶变换得到传感器接收目标时域信号ptarget(t)=ifft(ptarget(f)),t=1,2,…,fs,其中fs为传感器采样频率。
12、在其中一些实施例中,根据步骤(1)和(2),计算经信道传播的拖船信号pship(t),其具体步骤为:
13、①对于确定的海洋传播条件、拖船深度、拖船相对传感器的距离、接收深度,利用声场建模软件bellhop计算得到声纳工作频段下的拖船与传感器之间的信道传递函数hship(f);
14、②计算传感器接收拖船频域信号pship(f)=slship(f)·hship(f),其中slship(f)为拖船信号频谱;
15、③通过逆傅里叶变换得到传感器接收拖船时域信号pship(t)=ifft(pship(f)),t=1,2,…,fs,其中fs为传感器采样频率。
16、在其中一些实施例中,根据步骤(3),计算拖线阵背景噪声n(t),其具体步骤为:
17、拖线阵背景噪声主要由流噪声和海洋环境噪声两部分组成,
18、①由流噪声-拖曳速度数值模型得到给定拖曳速度下的流噪声频谱nll(f);
19、②由海洋环境噪声数值模型得到环境噪声频谱nlb(f);
20、③拖线阵背景噪声n(t)=ifft[nll(f)+nlb(f)],t=1,2,…,fs。
21、在其中一些实施例中,根据步骤(4),计算传感器接收时域信号,根据步骤(1)-(3),传感器接收时域信号为p(t)=ptarget(t)+pship(t)+n(t),t=1,2,…,fs。
22、在其中一些实施例中,根据步骤(4),计算拖曳阵各阵元时域信号:依据历史测量的拖线阵基阵姿态及时间变化规律,得到拖线阵各阵元与首阵元相对位置关系,分别计算得到目标和拖船与拖线阵各阵元的相对距离,以及各阵元深度,重复步骤(1)~(4),得到拖线阵各阵元接收时域信号pm(t),m=1,2,…,m,其中m为阵元数。
23、与现有技术相比,本发明的有益效果是:在现有方法基础上,考虑拖曳速度、放缆长度等拖曳阵工作关键参数,引入拖曳速度-放缆长度-基阵深度经验关系、深海拖船干扰模型、拖曳速度-流噪声数值模型、海洋环境噪声数值模型,在确定的环境参数、目标参数、拖船参数、基阵参数条件下,能够实现拖曳阵深海探测目标信号、拖船干扰和背景噪声特性的准确模拟,生成不同环境和工况下的拖线阵深海被动探测数据,为深海检测辨识技术攻关和验证提供数据支撑。
24、本申请的一个或多个实施例的细节在以下附图和描述中提出,以使本申请的其他特征、目的和优点更加简明易懂,通过本申请的实施例对本申请进行详尽说明和了解。
技术特征:
1.一种深海环境下的拖线阵被动探测数据模拟方法,其特征在于:其步骤为:
2.根据权利要求1所述的一种深海环境下的拖线阵被动探测数据模拟方法,其特征在于:根据步骤(1)和(2),计算经信道传播的目标信号ptarget(t),其具体步骤为:
3.根据权利要求2所述的一种深海环境下的拖线阵被动探测数据模拟方法,其特征在于:根据步骤(1)和(2),计算经信道传播的拖船信号pship(t),其具体步骤为:
4.根据权利要求3所述的一种深海环境下的拖线阵被动探测数据模拟方法,其特征在于:根据步骤(3),计算拖线阵背景噪声n(t),其具体步骤为:
5.根据权利要求4所述的一种深海环境下的拖线阵被动探测数据模拟方法,其特征在于:根据步骤(4),计算传感器接收时域信号,根据步骤(1)-(3),传感器接收时域信号为p(t)=ptarget(t)+pship(t)+n(t),t=1,2,…,fs。
6.根据权利要求5所述的一种深海环境下的拖线阵被动探测数据模拟方法,其特征在于:根据步骤(4),计算拖曳阵各阵元时域信号:依据历史测量的拖线阵基阵姿态及时间变化规律,得到拖线阵各阵元与首阵元相对位置关系,分别计算得到目标和拖船与拖线阵各阵元的相对距离,以及各阵元深度,重复步骤(1)~(4),得到拖线阵各阵元接收时域信号pm(t),m=1,2,…,m,其中m为阵元数。
技术总结
本发明涉及被动声纳水下目标探测技术领域,尤其是一种深海环境下的拖线阵被动探测数据模拟方法,考虑拖曳速度、放缆长度等拖曳阵工作关键参数,引入拖曳速度‑放缆长度‑基阵深度经验关系、深海拖船干扰模型、拖曳速度‑流噪声数值模型、海洋环境噪声数值模型,在确定的环境参数、目标参数、拖船参数、基阵参数条件下,能够实现拖曳阵深海探测目标信号、拖船干扰和背景噪声特性的准确模拟,生成不同环境和工况下的拖线阵深海被动探测数据,本发明为深海检测辨识技术攻关和验证提供数据支撑。
技术研发人员:宋雪晶,刘福臣,张巧力,田玲爱,程涛
受保护的技术使用者:中国船舶集团有限公司第七一五研究所
技术研发日:
技术公布日:2024/3/5
- 还没有人留言评论。精彩留言会获得点赞!