一种针对雷达盲区内障碍物的避障方法和系统与流程
本发明属于自动驾驶,具体涉及一种针对雷达盲区内障碍物的避障方法和系统。
背景技术:
1、自动驾驶技术作为汽车行业重要的发展方向,自动驾驶的未来是推动智能汽车技术、智慧道路技术和车路协同技术融合发展,目的是提升自动驾驶车辆运行与网络安全保障能力,探索形成自动驾驶技术规模化应用。
2、自动驾驶技术中的障碍物检测现在业界的主流方案包括激光雷达、毫米波雷达和摄像头等传感器。其中,激光雷达是目前最为成熟的障碍物检测技术之一,它可以精确地测量出物体与车辆之间的距离和位置,而且具有很高的速度和角度分辨率。
3、目前业界主流的激光雷达布置方式有三种:第一种是在车辆前方布置一颗激光雷达,对于车辆前方的障碍物有较好的识别效果,但是车辆后方雷达就完全检测不到;第二种是在车辆四周各布置一颗激光雷达,雷达视野广阔,障碍物识别效果较好,但是成本较高;第三种是在车辆顶部布置一颗激光雷达,此方式也可以获得较广阔的雷达视野,并且成本较第二种方法也较低,但是由于此时雷达高度相对于第一种方案较高,而雷达发射角是固定的,这会导致距离车辆较近的障碍物会处于雷达的探测盲区内,对车辆自动驾驶存在安全隐患。
技术实现思路
1、本发明的目的就在于提供一种针对雷达盲区内障碍物的避障方法和系统,以解决背景技术中提出的问题。
2、本发明通过以下技术方案来实现上述目的:
3、一种针对雷达盲区内障碍物的避障方法,包括:
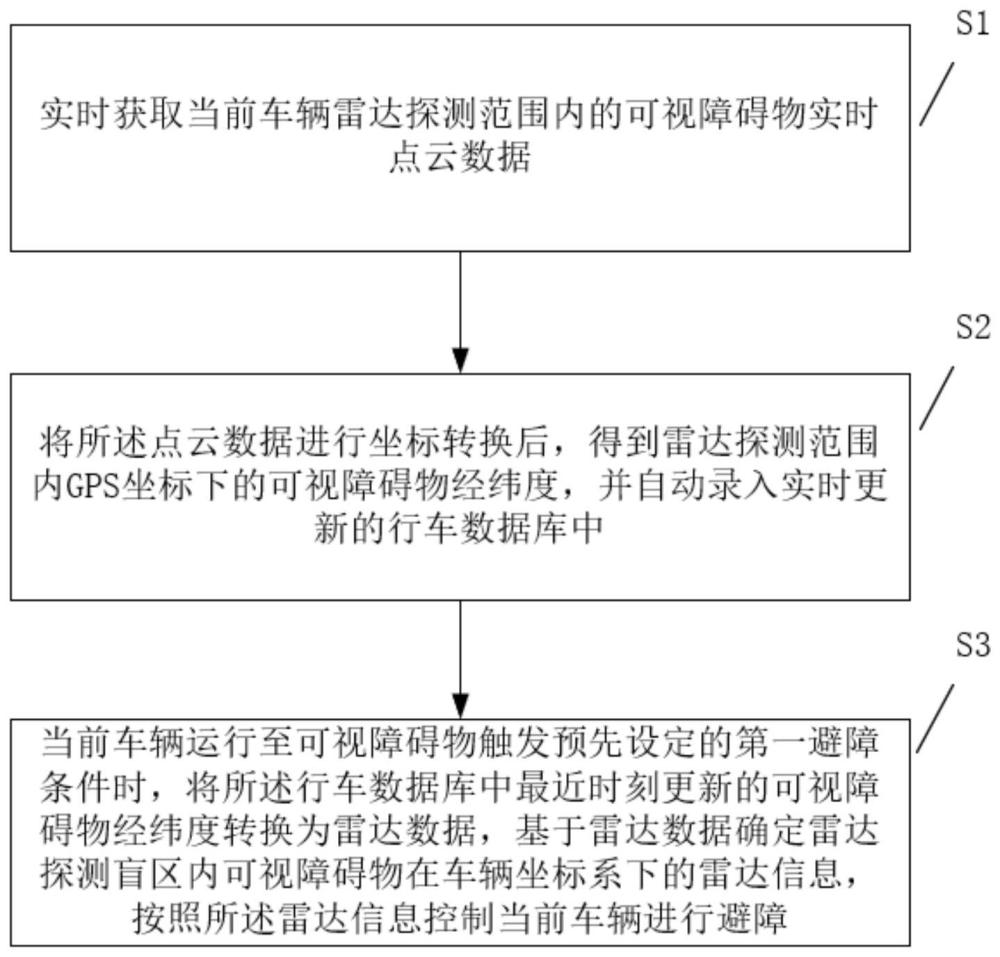
4、实时获取当前车辆雷达探测范围内的可视障碍物实时点云数据;
5、将所述点云数据进行坐标转换后,得到雷达探测范围内gps坐标下的可视障碍物经纬度,并自动录入实时更新的行车数据库中;
6、当前车辆运行至可视障碍物触发预先设定的第一避障条件时,将所述行车数据库中最近时刻更新的可视障碍物经纬度转换为雷达数据,基于雷达数据确定雷达探测盲区内可视障碍物在车辆坐标系下的雷达信息,按照所述雷达信息控制当前车辆进行避障。
7、作为本发明的进一步优化方案,在可视障碍物进入雷达探测盲区前还包括:实时接收当前车辆gps信号和导航信息,确定当前车辆经纬度、行驶速度、行驶路线以及航向。
8、作为本发明的进一步优化方案,当前车辆雷达探测范围为:
9、以当前车辆为圆心,以雷达设定探测距离为半径构成的圆形区域;以及,以当前车辆顶部为发射点,以雷达设定探测角度构成的扇形区域。
10、作为本发明的进一步优化方案,所述坐标转换具体为:将所述点云数据通过平移和旋转变换从雷达的局部直角坐标系转换为全局gps坐标系下的可视障碍物经纬度。
11、作为本发明的进一步优化方案,所述第一避障条件为:当可视障碍物完全脱离雷达探测范围时,或,可视障碍物的部分轮廓停留在雷达探测盲区时。
12、一种针对雷达盲区内障碍物的避障系统,应用于实现上述任一项所述避障方法,包括
13、障碍物监测模块,用于实时获取当前车辆雷达探测范围内的可视障碍物实时点云数据;
14、坐标转换模块,用于将所述点云数据进行坐标转换后,得到雷达探测范围内gps坐标下的可视障碍物经纬度,并自动录入实时更新的行车数据库中;
15、避障模块,用于在当前车辆运行至可视障碍物触发预先设定的第一避障条件时,将所述行车数据库中最近时刻更新的可视障碍物经纬度转换为雷达数据,基于雷达数据确定雷达探测盲区内可视障碍物在车辆坐标系下的雷达信息,按照所述雷达信息控制当前车辆进行避障。
16、一种电子设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如上述任一项所述避障方法。
17、本发明的有益效果在于:
18、(1)本发明针对顶部安装激光雷达时,近距离有较大的雷达探测死角情况进行了改善,使得近距离的障碍物也能够得到识别,提升了自动驾驶的避障效率,并且该避障方法不依赖对道路环境的检测,极大的提高了系统的适应性和可靠性,降低了自动驾驶的成本。
19、(2)本发明实现了在减少所使用的雷达数量、降低无人驾驶技术成本的同时,实现探测盲区内障碍物检测,并使得无人驾驶车辆能够根据探测盲区内的障碍物位置信息进行自主避障。
技术特征:
1.一种针对雷达盲区内障碍物的避障方法,其特征在于,包括:
2.根据权利要求1所述的一种针对雷达盲区内障碍物的避障方法,其特征在于:在可视障碍物进入雷达探测盲区前还包括:实时接收当前车辆gps信号和导航信息,确定当前车辆经纬度、行驶速度、行驶路线以及航向。
3.根据权利要求1所述的一种针对雷达盲区内障碍物的避障方法,其特征在于:当前车辆雷达探测范围为:
4.根据权利要求3所述的一种针对雷达盲区内障碍物的避障方法,其特征在于:所述坐标转换具体为:将所述点云数据通过平移和旋转变换从雷达的局部直角坐标系转换为全局gps坐标系下的可视障碍物经纬度。
5.根据权利要求3所述的一种针对雷达盲区内障碍物的避障方法,其特征在于:所述第一避障条件为:当可视障碍物完全脱离雷达探测范围时,或,可视障碍物的部分轮廓停留在雷达探测盲区时。
6.一种针对雷达盲区内障碍物的避障系统,应用于实现权利要求1-5任一项所述避障检测方法,其特征在于,包括
7.一种电子设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如权利要求1-5任一项所述避障方法。
技术总结
本发明属于自动驾驶技术领域,具体涉及一种针对雷达盲区内障碍物的避障方法和系统,方法包括实时获取当前车辆雷达探测范围内的可视障碍物实时点云数据;将所述点云数据进行坐标转换后,得到雷达探测范围内GPS坐标下的可视障碍物经纬度,并自动录入实时更新的行车数据库中,然后通过坐标转换将静态障碍物的经纬度转换为雷达数据输出,从而实现了雷达近距探测死角内障碍物的检测。本发明旨在减少所使用的雷达数量、降低无人驾驶技术成本的同时,实现探测盲区内障碍物检测,并使得无人驾驶车辆能够根据探测盲区内的障碍物位置信息进行自主避障。
技术研发人员:刘跃
受保护的技术使用者:合肥中科智驰科技有限公司
技术研发日:
技术公布日:2024/2/29
- 还没有人留言评论。精彩留言会获得点赞!