一种适用于智能机器人搭载的冰川浅层冰芯自动钻取装置
本发明涉及一种适用于飞行或地面智能机器人搭载的冰川浅层冰芯自动钻取装置,属于冰芯自动钻取。
背景技术:
1、冰芯气候环境记录研究是冰川学研究的一个重要方向。冰芯中不但记录着过去气候环境多种参数(如气温、降水、大气化学与大气环流等)的变化,而且记录着影响气候环境变化的各种驱动因子(如太阳活动、火山活动和温室气体含量等)的变化。同时,冰芯还记录了人类活动对气候环境的影响。20世纪格陵兰世纪冰帽冰芯十万年气候记录的发表,使冰芯气候环境记录研究成为过去气候环境变化研究的主角之一。过去30多年来,随着南、北两极地区冰芯古气候环境记录的恢复和研究深入,以及中低纬度地区(主要集中在青藏高原地区)高分辨率的冰芯气候环境记录的逐步拓展,冰芯研究已对过去全球气候变化研究做出了重大贡献。而随着冰芯分析技术的提高和研究程度的深入,全球冰芯气候环境记录研究与其他学科之间的交叉程度越来越大,尤其是与气象学、气候学、大气化学、地球化学、生物学、海洋学、天文学等学科之间的交叉日益凸显。特别是通过获取冰川表面的浅层冰雪样品,可以与现代的观测仪器数据相配合,细化揭示区域乃至全球尺度的现代气候环境变化机理,为现代人类生存环境适应提供帮助。
2、前期,南、北极与青藏高原地区所有冰芯的钻取,均是通过人工操作冰芯钻取装置来开展。这一工作模式具有钻取深度深、单根冰芯样品获取长度和质量可变、钻取流程安全可控等特点,且在冰芯获取后,可在第一时间对冰体的物理性状进行现场描述,获取第一手的观测数据。但同时,在这些地区开展冰芯钻取也存在极端恶劣环境的影响,酷寒、大风、紫外线强、人烟稀少等问题对冰芯钻取人员的身心健康都会带来不利影响。特别是在青藏高原的山地冰川地区,极高海拔导致的缺氧、低气压等问题,会严重影响冰芯钻取人员的身体健康。另外,考虑到极地冰川区地域广、中间冰裂隙多,高原山地冰川区海拔高、地势险、极难到达等问题,冰芯钻取人员在实施冰芯钻取和决定钻取数量时,也会由于难于到达和驻守时间不长等难题而无奈的减少钻取点位和数量。另一方面,在当前全球变暖的大背景下,青藏高原山地冰川区的冰川变化剧烈,整体呈融化微缩状态,低海拔冰雪中的气候环境记录保存受到了威胁。冰川表面冰体融化导致近现代气候环境记录消失,同时发生融化的区域海拔高度越来越高,造成能获取高质量完整冰芯气候记录的地点海拔高度越来越高,大部分都超过了海拔6000米以上,导致人力和目前大型的冰芯钻取设备无法到达。
3、综上可见,目前想在青藏高原山地冰川区和南、北极地区获取高质量完整冰芯气候记录的难度越来越大。而全球持续升温的趋势也急迫地敦促人类加快开展现有不同冰川区表层冰芯的钻取,便于妥善保存后用于后续气候环境记录研究,否则在有可能想研究时,表面冰体已融化殆尽,无芯可用。以上这些因素都会在一定程度上制约未来冰芯记录的气候环境变化研究的可持续性。
4、幸运地是,依据当前新型智能化科技技术的不断发展,特别是适用于极地和山地冰川区的飞行、地面智能机器人研究的迅速发展,使得原先只能单独靠人力才能到达的地区,现在可以靠智能机器人去到达。这就大大提升了极地和青藏高原山地冰川区等恶劣环境的可到达性。人们可以利用这些飞行或地面智能机器人搭载冰芯钻取装置,在诸如极地大范围的无人区、在青藏高原山地冰川6000米以上的区域,自主采集浅层冰芯样品。这既能提升冰芯的获取空间密度,也能减轻工作人员的工作量,还能第一时间快速将样品带回科考营地用于观察研究。但是,因已有冰芯钻取装置是靠人工操作实现取芯,故简单地将已有冰芯钻取装置通过飞行或地面智能机器人搭载至钻取点位,是无法自动实现冰芯钻取的。
5、由此可见,设计出一种通过飞行或地面智能机器人搭载至钻取点位,能够自动对冰川浅层冰芯实现钻取作业的冰芯钻取装置,是目前急需解决的问题。
技术实现思路
1、本发明的目的在于提供一种适用于智能机器人搭载的冰川浅层冰芯自动钻取装置,其可实现对青藏高原或极地等人类极难到达的极端环境区冰川浅层冰芯的自动高效钻取。
2、为了实现上述目的,本发明采用了以下技术方案:
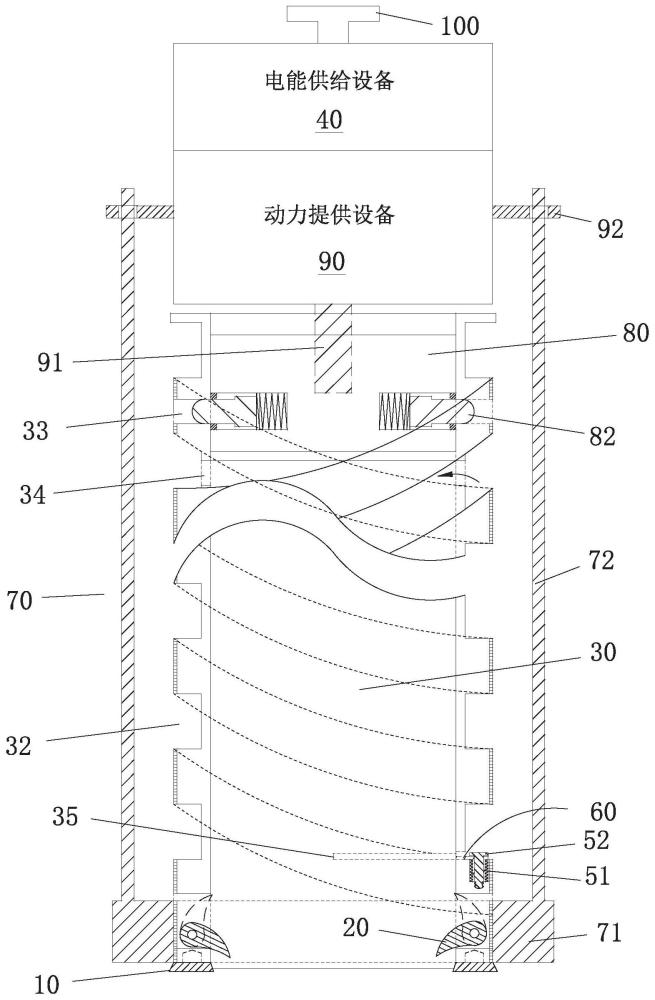
3、一种适用于智能机器人搭载的冰川浅层冰芯自动钻取装置,包括定位支撑筒,所述定位支撑筒内安装有钻杆;所述钻杆顶部经由传动轴与动力提供设备连接,所述动力提供设备上设有电能供给设备;在所述动力提供设备的驱动及所述传动轴的带动下,所述钻杆相对于所述定位支撑筒做向下伸出或向上缩进的旋转运动;所述钻杆底部安装有用于下切冰体的切削刀,所述钻杆下部可转动弹性安装有反转自动卡冰器和提拉自动卡冰器;所述反转自动卡冰器位于所述提拉自动卡冰器上面,用于在所述钻杆反向旋转时自动向所述钻杆内转动切入冰体来使冰体与冰川表面分离;所述提拉自动卡冰器用于在所述反转自动卡冰器切入冰体、智能机器人提升所述适用于智能机器人搭载的冰川浅层冰芯自动钻取装置时自动向所述钻杆内朝下转动来对未切断的冰体产生下压辅助切断效果,以及在所述钻杆停止转动、所述反转自动卡冰器复位后托住切削下的冰体。
4、本发明的优点是:
5、本发明特别针对青藏高原山地冰川区和极地等恶劣环境设计,通过飞行或地面智能机器人搭载,能够对冰川表面浅层冰芯实现无人化自动钻取,不受海拔高、地势险、极难到达等问题的制约,钻取点位和数量不再受限,工作人员工作量极大减轻,且搭载便携性强,钻取高效可靠,适于推广。
技术特征:
1.一种适用于智能机器人搭载的冰川浅层冰芯自动钻取装置,其特征在于,包括定位支撑筒,所述定位支撑筒内安装有钻杆;所述钻杆顶部经由传动轴与动力提供设备连接,所述动力提供设备上设有电能供给设备;在所述动力提供设备的驱动及所述传动轴的带动下,所述钻杆相对于所述定位支撑筒做向下伸出或向上缩进的旋转运动;所述钻杆底部安装有用于下切冰体的切削刀,所述钻杆下部可转动弹性安装有反转自动卡冰器和提拉自动卡冰器;所述反转自动卡冰器位于所述提拉自动卡冰器上面,用于在所述钻杆反向旋转时自动向所述钻杆内转动切入冰体来使冰体与冰川表面分离;所述提拉自动卡冰器用于在所述反转自动卡冰器切入冰体、智能机器人提升所述适用于智能机器人搭载的冰川浅层冰芯自动钻取装置时自动向所述钻杆内朝下转动来对未切断的冰体产生下压辅助切断效果,以及在所述钻杆停止转动、所述反转自动卡冰器复位后托住切削下的冰体。
2.如权利要求1所述的适用于智能机器人搭载的冰川浅层冰芯自动钻取装置,其特征在于,所述定位支撑筒包括底座,所述底座上开设有钻口,所述钻口上设有用于与所述钻杆的外螺纹活动螺接的内螺纹,所述底座上面设有至少两个固定杆,其中:所述动力提供设备上设有带穿孔的固定片,所述固定片借由所述穿孔活动穿设于所述固定杆上来防止所述钻杆正转下钻过程中发生反转。
3.如权利要求2所述的适用于智能机器人搭载的冰川浅层冰芯自动钻取装置,其特征在于,所述钻杆包括钻杆主体,所述钻杆主体的外侧壁设有所述外螺纹,所述钻杆上设有用于容置所述提拉自动卡冰器的柱状槽以及用于容置所述反转自动卡冰器的扁状槽。
4.如权利要求3所述的适用于智能机器人搭载的冰川浅层冰芯自动钻取装置,其特征在于,所述钻杆主体的外侧壁凹设有螺旋凹槽,所述钻杆的上部设有与所述螺旋凹槽贯通的导屑孔。
5.如权利要求3所述的适用于智能机器人搭载的冰川浅层冰芯自动钻取装置,其特征在于,所述反转自动卡冰器在所述钻杆不旋转或正向旋转时受弹力作用处于所述扁状槽内,仅在所述钻杆反向旋转时从所述扁状槽转出;除自身弹力外,所述提拉自动卡冰器不受力时伸出所述柱状槽处于所述钻杆内,在冰体朝所述钻杆顶部移动产生的推挤作用下转回所述柱状槽内。
6.如权利要求5所述的适用于智能机器人搭载的冰川浅层冰芯自动钻取装置,其特征在于,所述反转自动卡冰器包括呈镰刀状的反转卡冰片,所述反转卡冰片的转动端设有连接套筒,所述反转卡冰片经由穿过所述连接套筒固定于所述钻杆的所述钻杆主体上开设的固定孔内的固定钉而实现在所述钻杆上的安装,其中:所述连接套筒与所述固定钉之间设有弹簧;在所述弹簧的弹力作用下,所述连接套筒带动所述反转卡冰片始终处于朝所述扁状槽内转动的状态。
7.如权利要求5所述的适用于智能机器人搭载的冰川浅层冰芯自动钻取装置,其特征在于,所述提拉自动卡冰器包括带有尖角、呈椭圆状的提拉卡冰片,所述提拉卡冰片由转轴实现在所述钻杆上的安装,其中:所述转轴与所述提拉卡冰片之间设有弹簧;在所述弹簧的弹力作用下,所述提拉卡冰片始终处于围绕所述转轴朝所述柱状槽外转动的状态。
8.如权利要求3所述的适用于智能机器人搭载的冰川浅层冰芯自动钻取装置,其特征在于,所述切削刀包括弧形刀体,所述刀体一端设有刀刃,其中:所述刀刃的横截面呈梯形且伸出所述钻杆,所述刀刃为朝下倾斜凸出的尖角。
9.如权利要求1所述的适用于智能机器人搭载的冰川浅层冰芯自动钻取装置,其特征在于,所述传动轴的顶部与所述动力提供设备的出力轴固定连接,所述转动轴的下部可拆卸地卡接于所述钻杆上。
10.如权利要求1所述的适用于智能机器人搭载的冰川浅层冰芯自动钻取装置,其特征在于,所述适用于智能机器人搭载的冰川浅层冰芯自动钻取装置借由智能机器人搭载时,所述定位支撑筒用于与所述智能机器人固定连接,所述电能供给设备顶部设有固定连接件,以在搭载过程中所述智能机器人借由所述固定连接件对所述钻杆实现辅助固定,防止在搭载行进过程中发生钻杆自动旋转下落现象,其中:所述智能机器人为飞行或地面智能机器人。
技术总结
本发明公开了一种适用于智能机器人搭载的冰川浅层冰芯自动钻取装置,包括定位支撑筒,其内安装钻杆。钻杆顶部经传动轴与动力提供设备连接。动力提供设备上设有电能供给设备。在动力提供设备驱动下,钻杆相对于定位支撑筒做向下伸出或向上缩进的旋转运动。钻杆底部安装切削刀,钻杆下部可转动弹性安装反转自动卡冰器和提拉自动卡冰器。反转自动卡冰器用于自动转入钻杆内切入冰体分离冰体与冰川表面。提拉自动卡冰器用于在反转自动卡冰器切入冰体、智能机器人提升装置时自动向钻杆内朝下转动下压未切断的冰体实现辅助切断,及在钻杆停止转动、反转自动卡冰器复位后托住冰体。本发明可实现对人类极难到达的极端环境区冰川浅层冰芯的自动高效钻取。
技术研发人员:李久乐,徐柏青
受保护的技术使用者:中国科学院青藏高原研究所
技术研发日:
技术公布日:2024/2/29
- 还没有人留言评论。精彩留言会获得点赞!