一种道路规划用测绘装置及测绘方法与流程
本发明涉及测绘,具体是指一种道路规划用测绘装置及测绘方法。
背景技术:
1、城市规划是以发展眼光、科学论证、专家决策为前提,对城市经济结构、空间结构、社会结构发展进行规划,城市规划中需要对修建之前或者修建好的公路进行测量,现有道路测绘时一般采用测距轮进行,通过测距轮在地面上滚动,通过检测测距轮的转数来计算行走的路径大小,例如公告号为cn219511410u的一种市政道路测量用测距轮,需要测绘人员手持测距轮在道路上行走实现测量,因此测绘人员的行走路程非常大。
2、随着现有测绘技术的发展,出现了自动行走无人式的测绘车,是将测距轮安装在自走小车上,但是目前采用的测绘车结构是通过自走小车的转向轮实现行走和转向,当遇到路面行走路径上有障碍物时,测绘车无法左右平移,需要转向避让,因此转向避让时测绘的数值会有一定的偏差,影响最终测绘距离的精准度;并且测绘车在正常转向过程中,测距轮会跟随测绘车进行弧形转向,该弧形的路径也使测绘产生一定的误差。
技术实现思路
1、本发明针对现有技术的不足,提供一种道路规划用测绘装置及测绘方法。
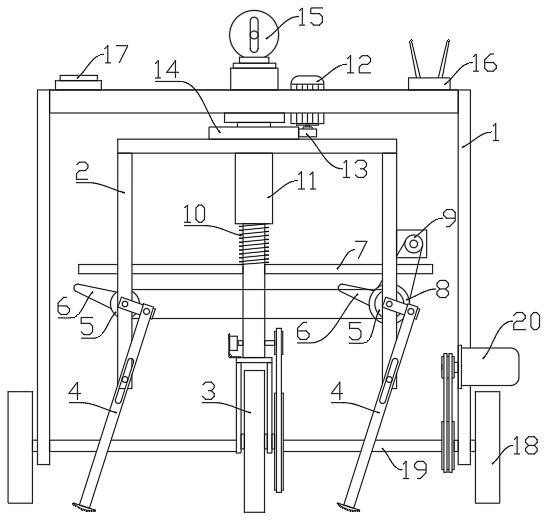
2、本发明是通过如下技术方案实现的,提供一种道路规划用测绘装置,包括沿直线行走的行走小车、转动连接在行走小车中心的旋转架以及竖向滑接在旋转架中心的测距滚轮组,所述测距滚轮组包括测距轮和转速传感器,所述旋转架的转动轴线竖向设置且穿过测距轮的中心;还包括左右排布的两个横移组件,所述横移组件包括轴接在旋转架上的转轴、固接在转轴两端的转动杆以及铰接在转动杆上的支撑杆,所述转轴前后延伸,所述旋转架上固接有位于转轴下方的销轴,所述支撑杆上开有容销轴插入的导向长槽;还包括驱动旋转架旋转的旋转驱动机构以及驱动两个转轴同步旋转的横移驱动机构。
3、作为优化,所述行走小车上装有摄像头、无线通讯模块和卫星定位模块。
4、作为优化,所述支撑杆的下端固接有地面支撑板,地面支撑板下端面为球面且设有多个防滑凸起。
5、作为优化,所述旋转驱动机构包括旋转电机以及安装在旋转电机上的主动齿轮,所述旋转架上固接有与主动齿轮啮合的被动齿轮。
6、作为优化,所述横移驱动机构包括固接在转轴上的同步链轮以及驱动任意转轴旋转的横移电机,两个转轴的同步链轮之间连接有同步链条。
7、作为优化,所述测距滚轮组还包括测距轮架和固接在测距轮架上端的导向杆,所述测距轮安装在测距轮架上,所述旋转架上固接有与导向杆适配的导向套。
8、作为优化,所述测距轮架上转动连接有检测转轴,测距轮侧面固接有主动带轮,检测转轴上固接有被动带轮,主动带轮和被动带轮通过同步带连接且主动带轮直径大于被动带轮直径,所述转速传感器检测所述检测转轴的转速。
9、作为优化,所述行走小车包括车架、两个驱动轮和两个从动轮,两个驱动轮之间连接有驱动轮轴,还包括驱动所述驱动轮轴旋转的行走电机。
10、作为优化,所述测距滚轮组侧面固接有顶板,转轴上固接有位于顶板下方的顶杆,所述顶杆和转动杆分别位于转轴两侧。
11、一种测绘方法,包括如下步骤:
12、a、行走小车在待测绘道路上沿直线行走,测距滚轮组的测距轮下落至地面,通过转速传感器检测所述测距轮的旋转周数来计算行走距离;
13、b、当遇到行走路径上存在障碍物时,两个横移组件的转轴同步旋转,通过转动杆的旋转带动支撑杆左右上下摆动,此时导向长槽在销轴上滑动,转动杆向下摆动使支撑杆下端支撑在地面上,继续向下摆动从而将整个行走小车从地面抬起,转轴继续旋转从而通过支撑杆下端左右摆动实现整个测绘装置的左右平移,通过控制转轴的旋转方向来切换平移方向;
14、c、转动杆向下摆动使支撑杆与地面接触时,通过顶杆向上摆动推动顶板向上移动,从而推动测距滚轮组向上移动,使测距轮离开地面;
15、d、当测绘装置需要转向时,两个横移组件的转轴同步旋转,转动杆向下摆动使支撑杆下端支撑在地面上,从而将整个行走小车从地面抬起,旋转驱动机构驱动行走小车旋转至要调整的方向,转轴反向旋转使行走小车下落至地面且支撑杆上移离开地面,通过旋转驱动机构驱动旋转架旋转至与行走小车相同的方向。
16、本发明的有益效果为:本发明的一种道路规划用测绘装置及测绘方法,可以实现测绘过程中的左右平移,从而有效避障的同时不影响测绘数值,并且可以随意调整方向,调整方向过程中测距轮始终保持不动,从而实现精准测量。
技术特征:
1.一种道路规划用测绘装置,其特征在于:包括沿直线行走的行走小车、转动连接在行走小车中心的旋转架(2)以及竖向滑接在旋转架(2)中心的测距滚轮组(3),所述测距滚轮组(3)包括测距轮(33)和转速传感器(37),所述旋转架(2)的转动轴线竖向设置且穿过测距轮(33)的中心;
2.根据权利要求1所述的一种道路规划用测绘装置,其特征在于:所述行走小车上装有摄像头(15)、无线通讯模块(16)和卫星定位模块(17)。
3.根据权利要求1所述的一种道路规划用测绘装置,其特征在于:所述支撑杆(43)的下端固接有地面支撑板(46),地面支撑板(46)下端面为球面且设有多个防滑凸起。
4.根据权利要求1所述的一种道路规划用测绘装置,其特征在于:所述旋转驱动机构包括旋转电机(12)以及安装在旋转电机(12)上的主动齿轮(13),所述旋转架(2)上固接有与主动齿轮(13)啮合的被动齿轮(14)。
5.根据权利要求1所述的一种道路规划用测绘装置,其特征在于:所述横移驱动机构包括固接在转轴(41)上的同步链轮(5)以及驱动任意转轴(41)旋转的横移电机(9),两个转轴(41)的同步链轮(5)之间连接有同步链条。
6.根据权利要求1所述的一种道路规划用测绘装置,其特征在于:所述测距滚轮组(3)还包括测距轮架(32)和固接在测距轮架(32)上端的导向杆(31),所述测距轮(33)安装在测距轮架(32)上,所述旋转架(2)上固接有与导向杆(31)适配的导向套(11)。
7.根据权利要求6所述的一种道路规划用测绘装置,其特征在于:所述测距轮架(32)上转动连接有检测转轴(36),测距轮(33)侧面固接有主动带轮(34),检测转轴(36)上固接有被动带轮(35),主动带轮(34)和被动带轮(35)通过同步带连接且主动带轮(34)直径大于被动带轮(35)直径,所述转速传感器(37)检测所述检测转轴(36)的转速。
8.根据权利要求1所述的一种道路规划用测绘装置,其特征在于:所述行走小车包括车架(1)、两个驱动轮(18)和两个从动轮(21),两个驱动轮(18)之间连接有驱动轮轴(19),还包括驱动所述驱动轮轴(19)旋转的行走电机(20)。
9.根据权利要求1-8任一项所述的一种道路规划用测绘装置,其特征在于:所述测距滚轮组(3)侧面固接有顶板(7),转轴(41)上固接有位于顶板(7)下方的顶杆(6),所述顶杆(6)和转动杆(42)分别位于转轴(41)两侧。
10.一种使用权利要求9所述测绘装置进行的测绘方法,其特征在于,包括如下步骤:
技术总结
本发明涉及一种道路规划用测绘装置及测绘方法,包括沿直线行走的行走小车、转动连接在行走小车中心的旋转架以及竖向滑接在旋转架中心的测距滚轮组,所述测距滚轮组包括测距轮和转速传感器,所述旋转架的转动轴线竖向设置且穿过测距轮的中心;还包括左右排布的两个横移组件,所述横移组件包括轴接在旋转架上的转轴、固接在转轴两端的转动杆以及铰接在转动杆上的支撑杆,所述转轴前后延伸,所述旋转架上固接有位于转轴下方的销轴,所述支撑杆上开有容销轴插入的导向长槽;本发明可以实现测绘过程中的左右平移,从而有效避障的同时不影响测绘数值,并且可以随意调整方向,调整方向过程中测距轮始终保持不动,从而实现精准测量。
技术研发人员:王胜军,王栋,刘晓梅
受保护的技术使用者:山东瑞鑫时空信息科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!