一种仿生超敏宽裕柔性应变传感器及其制备方法
本发明涉及传感器,尤其涉及一种仿生超敏宽裕柔性应变传感器及其制备方法。
背景技术:
1、在现有的技术中,每个柔性应变传感器都在测量范围和灵敏度之间都有权衡关系,例如,当宽测量范围会导致灵敏度低,另一方面,高灵敏度会减小传感器的可检测范围。
2、然而,在应变传感器选用时,必须根据目标信号特点来使用不同的传感器,导致应变传感器无法兼顾高灵敏度和高检测范围。
3、因此,现有技术还有待于改进和发展。
技术实现思路
1、鉴于上述问题,本申请实施例提供一种仿生超敏宽裕柔性应变传感器及其制备方法,旨在解决现有技术中应变传感器测量范围较宽对应的灵敏度较小以及灵敏度较高对应的测量范围较窄,导致应变传感器无法在高灵敏度下适用不同的测量范围的问题。
2、本发明为解决上述技术问题提供如下技术方案:
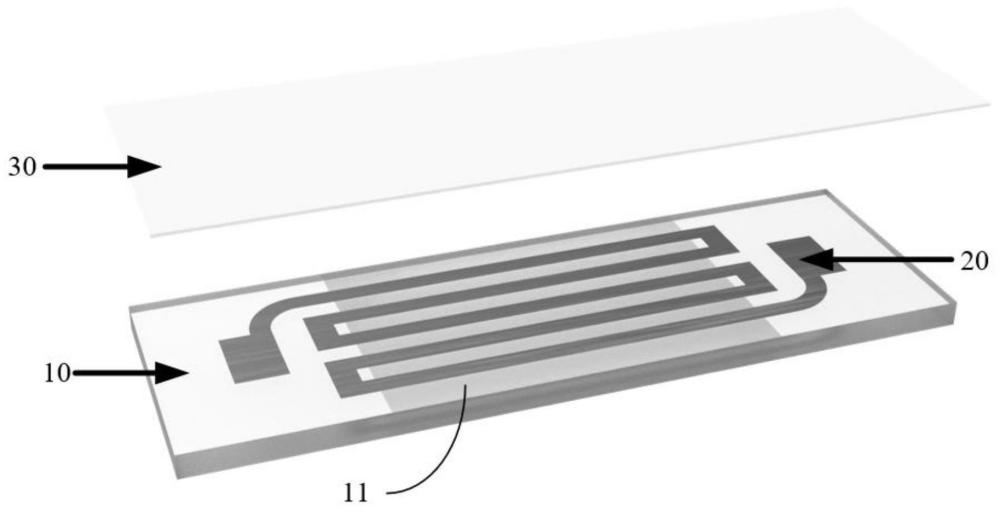
3、本申请实施例第一方面提供一种仿生超敏宽裕柔性应变传感器,所述仿生超敏宽裕柔性应变传感器包括:柔性基底,所述柔性基底上设有多组不同缝宽的缝单元,沿所述缝单元的排布方向,多个所述缝单元的缝宽由所述柔性基底两侧向中部逐渐增大;传感结构,设于所述柔性基底及所述缝单元的表面;封装层,盖设于所述传感结构;所述封装层变形时,靠近所述柔性基底两侧的所述缝单元挤压,所述传感结构的电阻变化以感知第一测量范围的物理量;或靠近所述柔性基底中部的缝单元挤压,所述传感结构的电阻变化以感知第二测量范围的物理量。
4、在一种可能的实施方式中,每组的多个所述缝单元的缝宽相同,且每组的多个所述缝单元相邻排布。
5、在一种可能的实施方式中,所述缝单元由所述柔性基底的一端延伸至另一端,多个所述缝单元相互平行设置,且每相邻两个所述缝单元之间的缝间距相同。
6、在一种可能的实施方式中,位于所述柔性基底的两侧区域的多组所述缝单元关于所述柔性基底的中线对称。
7、在一种可能的实施方式中,所述传感结构采用蛇形走线或单一走线的排布方式;
8、其中,蛇形走线排布的所述传感结构的拐角包括直角、弧形拐角和多边形拐角的一种。
9、在一种可能的实施方式中,所述缝单元的截面呈v型,且每个所述缝单元的缝深相同;
10、在感知所述第二测量范围的物理量时,位于所述柔性基底的两侧区域的所述缝单元的同层闭合程度高于位于所述柔性基底的中部区域的所述缝单元的同层闭合程度。
11、在一种可能的实施方式中,所述柔性基底的材料为聚二甲基硅氧烷,和/或所述封装层的材料为聚酰亚胺。
12、在一种可能的实施方式中,所述柔性基底上设有两个接触触点,所述封装层包括两个金属焊盘,两个所述接触触点与两个所述金属焊盘一一对应,所述金属焊盘位于背离边缘侧所述缝单元和所述柔性基底一侧边缘之间。
13、本申请实施例第二方面提供一种仿生超敏宽裕柔性应变传感器的制备方法,所述仿生超敏宽裕柔性应变传感器的制备方法用于制备上述任一项所述仿生超敏宽裕柔性应变传感器,包括如下步骤:
14、制备柔性基底,所述柔性基底上刻蚀有多组不同缝宽的缝单元;
15、采用掩模版在所述柔性基底及所述缝单元的表面上形成传感结构;
16、在所述传感结构上形成覆盖所述传感结构和所述缝单元的封装层,得到仿生超敏宽裕柔性应变传感器。
17、在一种可能的实施方式中,所述制备柔性基底,具体包括:
18、提供聚二甲基硅氧烷材料的预聚物和刻蚀有多组不同缝宽缝单元的母版;
19、将混合后的所述预聚物与固定剂旋涂于所述母版,将所述母版中冷却固化后的固化物取出,得到柔性基底。
20、有益效果:本发明提供一种仿生超敏宽裕柔性应变传感器及其制备方法,仿生超敏宽裕柔性应变传感器包括:柔性基底,所述柔性基底上设有多组不同缝宽的缝单元,沿所述缝单元的排布方向,多个所述缝单元的缝宽由所述柔性基底两侧向中部逐渐增大;传感结构,设于所述柔性基底及所述缝单元的表面;封装层,盖设于所述传感结构;所述封装层变形时,靠近所述柔性基底两侧的所述缝单元挤压,所述传感结构的电阻变化以感知第一测量范围的物理量;或靠近所述柔性基底中部的缝单元挤压,所述传感结构的电阻变化以感知第二测量范围的物理量。传感结构通过外侧(即两侧)较窄缝宽的缝单元感知需要高灵敏度且较小的测量范围的物理量,且传感结构通过内侧(即中部)较宽缝宽的缝单元感知需要高灵敏度且较大测量范围的物理量,从而无需根据目标信号特点来使用不同的传感器,能够仅通过该应变传感器即可兼顾高灵敏度和不同的检测范围,进而实现在高灵敏度下适用不同测量范围的目的,达到扩大应变传感器应用场景的效果。
21、除了上面所描述的本申请解决的技术问题、构成技术方案的技术特征以及由这些技术方案的技术特征所带来的有益效果外,本申请提供的仿生超敏宽裕柔性应变传感器及其制备方法所能解决的其他技术问题、技术方案中包含的其他技术特征以及这些技术特征带来的有益效果,将在具体实施方式中作出进一步详细的说明。
技术特征:
1.一种仿生超敏宽裕柔性应变传感器,其特征在于,所述仿生超敏宽裕柔性应变传感器包括:
2.根据权利要求1所述的仿生超敏宽裕柔性应变传感器,其特征在于,每组的多个所述缝单元的缝宽相同,且每组的多个所述缝单元相邻排布。
3.根据权利要求1所述的仿生超敏宽裕柔性应变传感器,其特征在于,所述缝单元由所述柔性基底的一端延伸至另一端,多个所述缝单元相互平行设置,且每相邻两个所述缝单元之间的缝间距相同。
4.根据权利要求1所述的仿生超敏宽裕柔性应变传感器,其特征在于,位于所述柔性基底的两侧区域的多组所述缝单元关于所述柔性基底的中线对称。
5.根据权利要求1所述的仿生超敏宽裕柔性应变传感器,其特征在于,所述传感结构采用蛇形走线或单一走线的排布方式;
6.根据权利要求1所述的仿生超敏宽裕柔性应变传感器,其特征在于,所述缝单元的截面呈v型,且每个所述缝单元的缝深相同;
7.根据权利要求1所述的仿生超敏宽裕柔性应变传感器,其特征在于,所述柔性基底的材料为聚二甲基硅氧烷,和/或所述封装层的材料为聚酰亚胺。
8.根据权利要求1所述的仿生超敏宽裕柔性应变传感器,其特征在于,所述柔性基底上设有两个接触触点,所述封装层包括两个金属焊盘,两个所述接触触点与两个所述金属焊盘一一对应,所述金属焊盘位于背离边缘侧所述缝单元和所述柔性基底一侧边缘之间。
9.一种仿生超敏宽裕柔性应变传感器的制备方法,其特征在于,所述仿生超敏宽裕柔性应变传感器的制备方法用于制备权利要求1至8任一项所述仿生超敏宽裕柔性应变传感器,包括如下步骤:
10.根据权利要求9所述的仿生超敏宽裕柔性应变传感器的制备方法,其特征在于,所述制备柔性基底,具体包括:
技术总结
本发明公开了一种仿生超敏宽裕柔性应变传感器及其制备方法,仿生超敏宽裕柔性应变传感器包括:柔性基底,所述柔性基底上设有多组不同缝宽的缝单元,沿所述缝单元的排布方向,多个所述缝单元的缝宽由所述柔性基底两侧向中部逐渐增大;传感结构,设于所述柔性基底及所述缝单元的表面;封装层,盖设于所述传感结构;所述封装层变形时,靠近所述柔性基底两侧的所述缝单元挤压,所述传感结构的电阻变化以感知第一测量范围的物理量;或靠近所述柔性基底中部的缝单元挤压,所述传感结构的电阻变化以感知第二测量范围的物理量。本发明能够兼顾高灵敏度和不同的检测范围,实现在高灵敏度下适用不同测量范围的目的。
技术研发人员:侯涛,谢楠,刘富,韩志武,赵宇锋,王跃桥,刘美赫
受保护的技术使用者:吉林大学
技术研发日:
技术公布日:2024/3/17
- 还没有人留言评论。精彩留言会获得点赞!