港口设备移动路线规划装置的制作方法
本发明涉及港口设备移动路线规划装置。这项研究得到了海洋水产部资助的韩国海洋科学技术振兴院(kimst)的支持(20220583)。
背景技术:
1、堆场牵引车是在集装箱码头内牵引堆场底盘(yard chassis),而在码头和集装箱堆场之间运输和装载集装箱的设备。
2、最近,正在开发联网自动驾驶港口运输设备(cayt,connected autonomous yardtractor),通过将自动驾驶技术结合于堆场牵引车,可以以无人状态自动将集装箱运输到所需的位置。
3、目前,韩国港口大多处于半自动化码头水平,虽然一些主要港口已经实现堆场起重机的自动化,但搬运集装箱的堆场牵引车仍然依靠人力。
4、将自动驾驶技术结合在堆场牵引车来无人驾驶时,当堆场牵引车、卸载设备和操作人员的移动路径重叠时可能发生事故。
5、因此,需要一种预测港口内堆场牵引车、卸载设备和操作人员的移动路径,并规划移动路径来防止移动路径重叠的技术。
技术实现思路
1、发明要解决的技术问题
2、本发明一实施例要解决的技术问题包括预测堆场牵引车、卸载设备和操作人员的移动路径,并规划移动路线从而防止移动路径重叠。
3、本发明要解决的技术问题并不局限于上述的技术问题,本发明所属技术领域的普通技术人员通过下面的记载可以清楚理解其他未言及的技术问题。
4、解决问题的技术方案
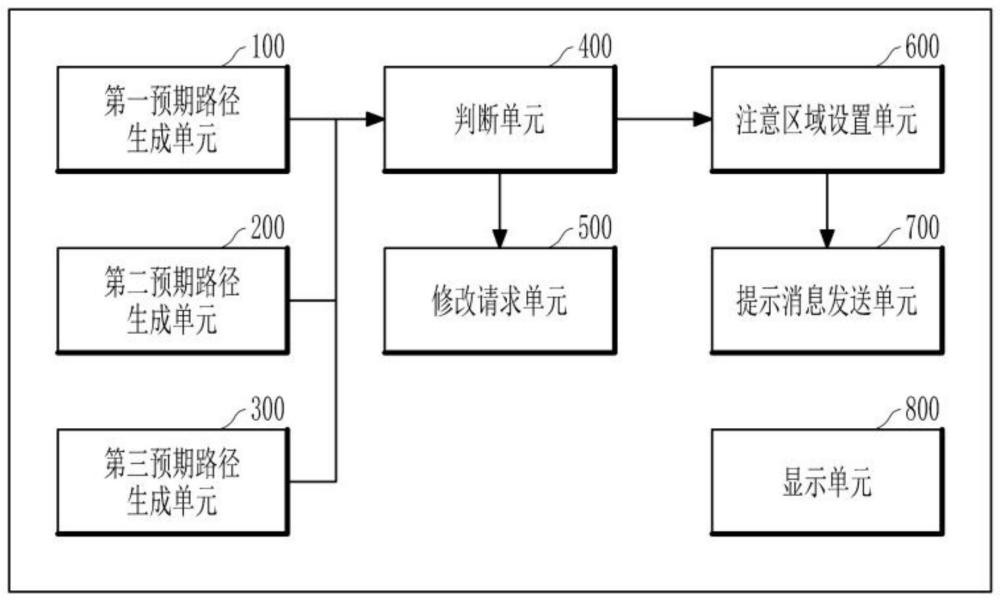
5、为解决上述技术问题,根据本发明的一方面的港口设备移动路线规划装置包括:第一预期路径生成单元,生成无人运输设备的第一预期路径;第二预期路径生成单元,生成卸载设备的第二预期路径;判断单元,判断所述第一预期路径与所述第二预期路径的一部分在预设时间段内是否重叠;修改请求单元,当所述第一预期路径与所述第二预期路径的至少一部分重叠时,发送修改请求消息以修改所述第一预期路径或所述第二预期路径。
6、此外,还包括生成操作人员的第三预期路径的第三预期路径生成单元,所述判断单元可以判断所述第一预期路径、所述第二预期路径和所述第三预期路径中至少两条路径的一部分在预设时间段内是否重叠。
7、其中,所述修改请求单元可以基于预设的优先顺序,在第一预期路径或第二预期路径中选择要修改的路径。
8、其中,所述第一预期路径可以包括所述无人运输设备行驶的路径中包含的多个节点和连接所述节点的链路。
9、其中,还可以包括:注意区域设置单元,将所述第一预期路径、所述第二预期路径和所述第三预期路径中至少两条路径的一部分在所述预设时间段内重叠的区域设置为注意区域。
10、其中,所述判断单元可以基于所述第一预期路径包含的第一节点与所述第二预期路径包含的第二节点之间的坐标值判断是否重叠。
11、此外,还可以包括:提示消息发送单元,当预测到所述无人运输设备、所述卸载设备和所述操作人员中至少一个即将移动至所述注意区域时,发送提示消息。
12、此外,还可以包括:显示单元,按照预设时间段在地图上显示所述第一预期路径和所述第二预期路径。
13、其中,所述优先顺序可以确定为所述第一预期路径、所述第二预期路径和所述第三预期路径中所需移动时间和费用最少的。
14、发明的效果
15、如上所述,根据本发明的实施例及各个方面,在外部显示无人运输设备的操作信息,而在港口内的行驶路线和作业空间中用于现场操作人员或有人卡车驾驶员的安全和决策。
16、应当理解,本发明的效果不限于上述效果,而是包括能够从本发明的说明或权利要求书中记载的本发明的结构而推断出的所有效果。
技术特征:
1.一种港口设备移动路线规划装置,其特征在于,包括:
2.根据权利要求1所述的港口设备移动路线规划装置,其特征在于,
3.根据权利要求2所述的港口设备移动路线规划装置,其特征在于,
4.根据权利要求2所述的港口设备移动路线规划装置,其特征在于,
5.根据权利要求4所述的港口设备移动路线规划装置,其特征在于,
6.根据权利要求5所述的港口设备移动路线规划装置,其特征在于,
7.根据权利要求1所述的港口设备移动路线规划装置,其特征在于,
技术总结
根据本发明的一实施例,公开了一种港口设备移动路线规划装置,其包括:第一预期路径生成单元,生成无人运输设备的第一预期路径;第二预期路径生成单元,生成卸载设备的第二预期路径;判断单元,判断所述第一预期路径与所述第二预期路径的一部分在预设时间段内是否重叠;修改请求单元,当所述第一预期路径与所述第二预期路径的至少一部分重叠时,发送修改请求消息以修改所述第一预期路径或所述第二预期路径。
技术研发人员:李勋
受保护的技术使用者:道达尔软银有限公司
技术研发日:
技术公布日:2024/2/29
- 还没有人留言评论。精彩留言会获得点赞!