一种飞行器超大攻角俯仰振荡动态风洞试验装置的制作方法
本发明涉及一种风洞试验装置,具体涉及一种飞行器超大攻角俯仰振荡动态风洞试验装置,属于试验空气动力学测量。
背景技术:
1、超大攻角过失速机动能力已成为新一代战斗机/导弹的重要技术指标。以新型空射导弹为例,要求可在0.5s-2s内实现180°快速可控翻转机动,以高效打击作战目标,对提高作战效能和生存几率具有重要意义。在过失速机动过程中,飞行器流场结构发生剧烈变化,流动分离、涡的不对称性及破裂位置的激烈变化导致作用在其上的气动力和力矩随状态参数的变化呈现强烈的非线性、非定常特征,大攻角气动力特性不仅与飞行器状态变量的瞬时值有关,还与状态变量随时间的变化率以及机动运动的历程有关。精确获知非线性、非定常气动力对于飞行器大攻角过失速区域的气动力特性研究、飞行力学特性分析和飞行控制率设计极为重要。
2、大振幅动态风洞试验是研究飞行器大攻角非定常气动力特性的主要手段。然而,现有主流技术的试验振幅一般为30°,最大攻角不超过90°,试验振荡频率不超过3hz。随着飞行器研制水平的不断进步,过失速机动能力设计向着更大攻角,更快翻转频率迈进,现有试验技术无论是振幅、振型,还是振荡频率模拟均无法满足新一代战斗机/导弹的研制需求。
技术实现思路
1、本发明的目的在于克服上述缺陷,提供一种飞行器超大攻角俯仰振荡动态风洞试验装置,本发明解决了现有试验中振幅、振型和振荡频率模拟均无法满足新一代战斗机/导弹研制需求的技术问题。本发明针对飞行器超大攻角非定常气动力风洞试验测量问题,提供一种飞行器超大攻角俯仰振荡动态风洞试验装置,对新一代战斗机/导弹的气动力特性研究具有重要意义。
2、为实现上述发明目的,本发明提供如下技术方案:
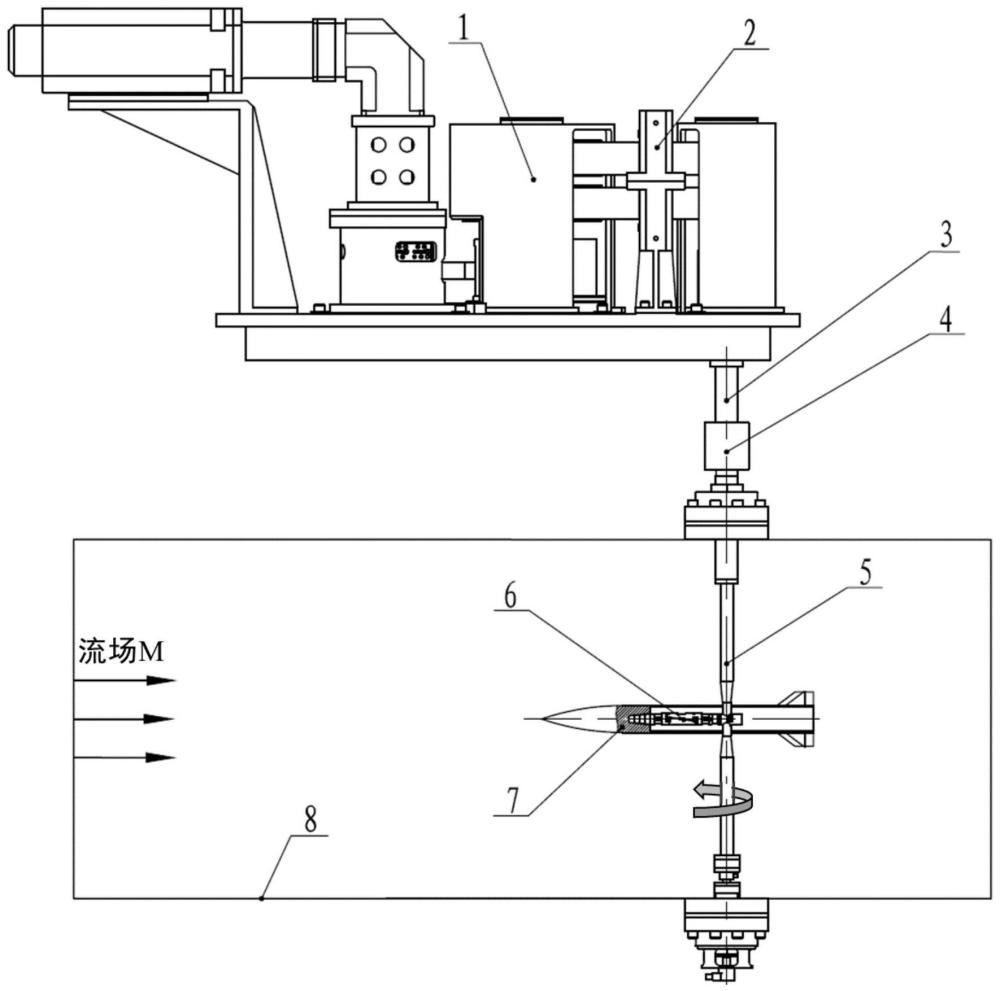
3、一种飞行器超大攻角俯仰振荡动态风洞试验装置,包括驱动机构、支撑机构、天平、模型和风洞;
4、驱动机构置于风洞外侧;
5、驱动机构包括转动驱动机构、曲柄连杆机构和同步带轮放大机构;曲柄连杆机构的第一端连接转动驱动机构,转动驱动机构驱动曲柄连杆机构的第二端进行周期性简谐转动;曲柄连杆机构的第二端安装同步带轮放大机构,同步带轮放大机构用于将曲柄连杆机构的第二端的周期性简谐转动的幅度等比例放大至支撑机构;
6、支撑机构安装于风洞内部;支撑机构用于支撑天平和模型,并带动天平和模型进行周期性简谐转动。
7、进一步的,驱动机构的转动驱动机构包括依次连接的电机、减速器、驱动轴联轴器、驱动轴和滑块座;电机通过减速器、驱动轴联轴器和驱动轴驱动滑块座绕驱动轴的轴线匀速转动。
8、进一步的,驱动机构的曲柄连杆机构包括滑块、滑块转轴、连杆臂、摆动轴、摇臂和摇臂轴;其中,滑块作为曲柄连杆机构的第一端,摇臂轴作为曲柄连杆机构的第二端;
9、滑块安装于滑块座上;滑块转轴固定安装于滑块上,滑块转轴的轴线与驱动轴的轴线平行,滑块转轴的轴线与驱动轴的轴线之间的距离r>0;连杆臂一端通过轴承与滑块转轴连接,另一端通过轴承与摆动轴连接;摇臂两端分别连接摆动轴和摇臂轴;滑块座的匀速转动带动滑块及滑块转轴进行匀速圆周运动,进而通过连杆臂、摆动轴、摇臂带动摇臂轴进行绕自身轴线的周期性简谐转动。
10、进一步的,同步带轮放大机构包括大同步带轮组、小同步带轮组、同步带和输出轴;
11、输出轴的轴线与驱动轴、摇臂轴的轴线平行,大同步带轮组安装于摇臂轴上,小同步带轮组安装于输出轴上,大同步带轮组和小同步带轮组之间利用同步带连接;摇臂轴周期性简谐转动的幅度等比例放大至输出轴。
12、进一步的,支撑机构包括第一支承座、第二支承座、第一转轴轴承组、第二转轴轴承组、第一转轴、第二转轴和支撑轴;
13、第一支承座和第二支承座分别固定安装于风洞两侧壁上,第一转轴的第一端通过第一转轴轴承组安装于第一支承座上,第二转轴的第一端通过第二转轴轴承组安装于第二支承座上,第一转轴的第二端连接支撑轴,第二转轴的第二端连接支撑轴;
14、第一转轴的第一端通过联轴器连接输出轴;
15、支撑轴用于安装天平,模型安装于天平上。
16、进一步的,还包括检测装置,检测装置包括拉力传感器和旋转编码器;
17、拉力传感器设于第二转轴的第二端和支撑轴之间,拉力传感器为单轴向力传感器,用于支撑机构安装时的初始轴向预应力监测;
18、第一转轴的第一端通过第一转轴轴承组安装于第一支承座上并利用第一转轴螺母紧固,第二转轴的第一端通过第二转轴轴承组安装于第二支承座上并利用编码器座紧固,旋转编码器安装于编码器座上,旋转编码器用于监测模型的俯仰角位移。
19、进一步的,大同步带轮组和小同步带轮组分别包括两组带轮;
20、大同步带轮组的两组带轮通过大轮挡套隔开,小同步带轮组的两组带轮通过小轮挡套;大轮挡套为套接于摇臂轴上的环形结构,小轮挡套为套接于输出轴上的环形结构;
21、两组同步带通过同步带张紧轮分别张紧;
22、大同步带轮组和小同步带轮组的直径比n≥3。
23、进一步的,滑块利用调整螺栓安装于滑块座上,通过调整螺栓调整滑块转轴的轴线与驱动轴的轴线之间的距离r,实现摇臂轴周期性简谐转动时振幅在≤30°范围内的调整。
24、进一步的,联轴器设于风洞外侧;
25、通过拆、装联轴器重新定位输出轴和第一转轴的相对滚转角度,以实现模型的初始零位攻角调整。
26、进一步的,还包括底座;
27、驱动机构中的电机和减速器固定安装于底座上;驱动轴、摇臂轴和输出轴通过轴承安装于底座上。
28、本发明与现有技术相比具有如下至少一种有益效果:
29、(1)本发明提供的一种飞行器超大攻角俯仰振荡动态风洞试验装置,采用“曲柄连杆机构+同步带轮放大机构”的组合形式,可使振幅a达90°,最大试验攻角达180°,最大翻转频率达4.2hz,以有效满足当前风洞试验需求;
30、(2)本发明提供的一种飞行器超大攻角俯仰振荡动态风洞试验装置,采用“曲柄连杆机构+同步带轮放大机构”的组合形式,可最大限度利用电机输出功率,有效提升装置振荡频率;同时,电机匀速驱动时,装置末端转动运动输出为严格的周期性简谐形式,模型转动振荡振型保真度较高;
31、(3)本发明提供的一种飞行器超大攻角俯仰振荡动态风洞试验装置,驱动机构“曲柄”设置有变长度r的功能,通过改变曲柄长度,可便捷、精准的调整装置的振幅a,以快速满足不同振幅工况下的试验需求;
32、(4)本发明提供的一种飞行器超大攻角俯仰振荡动态风洞试验装置,通过洞外联轴器便捷、精准、快速改变模型的初始攻角,满足不同启动攻角工况下的试验需求;同时,装置可扩充、满足“俯仰+滚转”的双自由度试验工况。
技术特征:
1.一种飞行器超大攻角俯仰振荡动态风洞试验装置,其特征在于,包括驱动机构(1)、支撑机构(5)、天平(6)、模型(7)和风洞(8);
2.根据权利要求1所述的一种飞行器超大攻角俯仰振荡动态风洞试验装置,其特征在于,驱动机构(1)的转动驱动机构包括依次连接的电机(103)、减速器(104)、驱动轴联轴器(106)、驱动轴(108)和滑块座(112);电机(103)通过减速器(104)、驱动轴联轴器(106)和驱动轴(108)驱动滑块座(112)绕驱动轴(108)的轴线匀速转动。
3.根据权利要求2所述的一种飞行器超大攻角俯仰振荡动态风洞试验装置,其特征在于,驱动机构(1)的曲柄连杆机构包括滑块(113)、滑块转轴(115)、连杆臂(117)、摆动轴(120)、摇臂(122)和摇臂轴(125);
4.根据权利要求3所述的一种飞行器超大攻角俯仰振荡动态风洞试验装置,其特征在于,同步带轮放大机构包括大同步带轮组(129)、小同步带轮组(138)、同步带(134)和输出轴(141);
5.根据权利要求4所述的一种飞行器超大攻角俯仰振荡动态风洞试验装置,其特征在于,支撑机构(5)包括第一支承座(501)、第二支承座(509)、第一转轴轴承组(502)、第二转轴轴承组(510)、第一转轴(504)、第二转轴(508)和支撑轴(505);
6.根据权利要求5所述的一种飞行器超大攻角俯仰振荡动态风洞试验装置,其特征在于,还包括检测装置,检测装置包括拉力传感器(507)和旋转编码器(512);
7.根据权利要求4所述的一种飞行器超大攻角俯仰振荡动态风洞试验装置,其特征在于,大同步带轮组(129)和小同步带轮组(138)分别包括两组带轮;
8.根据权利要求3所述的一种飞行器超大攻角俯仰振荡动态风洞试验装置,其特征在于,滑块(113)利用调整螺栓(114)安装于滑块座(112)上,通过调整螺栓(114)调整滑块转轴(115)的轴线与驱动轴(108)的轴线之间的距离r,实现摇臂轴(125)周期性简谐转动时振幅在≤30°范围内的调整。
9.根据权利要求5所述的一种飞行器超大攻角俯仰振荡动态风洞试验装置,其特征在于,联轴器(4)设于风洞(8)外侧;
10.根据权利要求6所述的一种飞行器超大攻角俯仰振荡动态风洞试验装置,其特征在于,还包括底座(101);
技术总结
本发明公开了一种飞行器超大攻角俯仰振荡动态风洞试验装置,包括驱动机构、支撑机构、天平、模型和风洞;驱动机构包括转动驱动机构、曲柄连杆机构和同步带轮放大机构;曲柄连杆机构的第一端连接转动驱动机构,转动驱动机构驱动曲柄连杆机构的第二端进行周期性简谐转动;曲柄连杆机构的第二端安装同步带轮放大机构,同步带轮放大机构用于将曲柄连杆机构的第二端的周期性简谐转动的幅度等比例放大至支撑机构;支撑机构用于支撑天平和模型,并带动天平和模型进行周期性简谐转动。本发明提供一种飞行器超大攻角俯仰振荡动态风洞试验装置,对新一代战斗机/导弹的气动力特性研究具有重要意义。
技术研发人员:闫万方,魏忠武,王帅,周健,谢峰,张晨凯,陈天奇
受保护的技术使用者:中国航天空气动力技术研究院
技术研发日:
技术公布日:2024/4/24
- 还没有人留言评论。精彩留言会获得点赞!