一种提升IMU和轮速计组合定位算法精度的方法
本发明涉及车辆定位,具体为一种提升imu和轮速计组合定位算法精度的方法。
背景技术:
1、定位技术是实现车辆辅助驾驶功能或自动驾驶功能的关键基础技术之一。常见的定位技术可分为绝对定位技术和相对定位技术。绝对定位技术依靠外部信息提供绝对的车辆位置和姿态信息,包括gnss(global navigation satellite system)定位、rtk(realtimekinematic)定位、基于地图特征匹配的视觉定位和基于点云匹配的激光雷达定位。相对定位技术利用车辆自身的传感器如imu(inertial measurement unit)或轮速计,结合车辆运动学或动力学模型得到车辆的位姿增量信息,进而实现车辆定位。相对定位技术不受外界环境的干扰,但由于存在积分误差,其定位误差将随着时间的推移而不断累积,影响车辆的辅助驾驶或自动驾驶功能。
2、主流的车辆定位方案采用卡尔曼滤波的框架融合绝对定位信息和相对定位信息,能够实现长时间的高精度定位。然而,在特殊情况下,比如传感器受到干扰或车辆进入没有高精地图的隧道区域,绝对定位技术将面临失效的风险,只能依靠车载的imu和轮速计等传感器实现车辆的相对定位。而不准确的参数将直接影响相对定位算法的精度和稳定性。例如,在轮胎打滑的情况下,基于轮速信号得到的车辆定位信息具有较大的失真,理应降低卡尔曼滤波框架中轮速信号的置信度水平。此外,现有的imu和轮速计组合定位算法通常将轮胎有效滚动半径和车辆质心位置等参数视为定值,而实际上车速、载荷、胎压和行驶路况等因素都会造成轮胎有效滚动半径和车辆质心位置的变化。
技术实现思路
1、针对现有技术中存在的问题,本发明的目的是:提供一种提升imu和轮速计组合定位算法精度的方法,能够减小组合定位算法的累积误差,在绝对定位技术失效的情况下能有效提升imu和轮速计组合定位算法的精度。
2、为了达到上述目的,本发明采用如下技术方案:
3、一种提升imu和轮速计组合定位算法精度的方法,包括以下步骤:
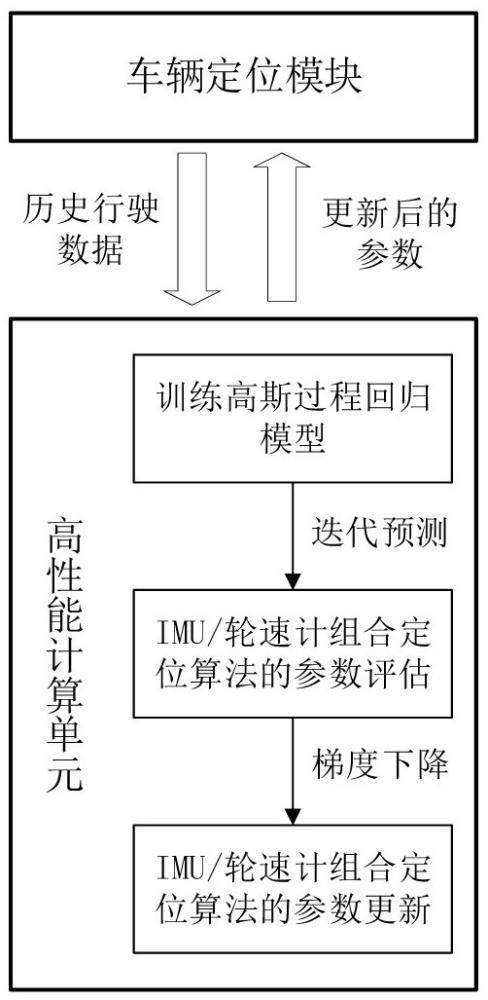
4、步骤s1,在绝对定位技术可用的情况下,车辆定位模块将历史行驶数据发送至高性能计算单元;
5、步骤s2,高性能计算单元根据车辆的历史行驶数据训练高斯过程回归模型,所述高斯过程回归模型用于模拟产生imu和轮速计的输出信号;
6、步骤s3,基于训练好的高斯过程回归模型的迭代预测,评估imu和轮速计组合定位算法的参数;
7、步骤s4,通过梯度下降算法更新imu和轮速计组合定位算法的参数;
8、步骤s5,高性能计算单元将更新后的参数回传给车辆定位模块。
9、进一步地,所述车辆为辅助驾驶车辆或自动驾驶车辆;所述高性能计算单元包括车载高性能计算单元和云端高性能计算单元。
10、进一步地,所述绝对定位技术能够提供车辆的绝对位置、姿态信息,包括gnss定位技术、rtk定位技术、视觉定位技术和激光雷达定位技术。
11、进一步地,所述历史行驶数据包括imu的输出信号、轮速计的输出信号、车辆控制信号以及车辆定位轨迹;所述车辆控制信号包括油门开度、制动踏板开度和方向盘转角数据;所述车辆定位轨迹通过imu与至少一种绝对定位技术融合得到。
12、进一步地,模拟imu的高斯过程回归模型的训练输入为历史imu输出信号和车辆控制信号,训练输出为历史imu输出信号在相邻采样时刻的变化量;
13、模拟轮速计的高斯过程回归模型的训练输入为历史轮速计输出信号和车辆控制信号,训练输出为历史轮速计输出信号在相邻采样时刻的变化量。
14、进一步地,在训练所述高斯过程回归模型时,选择零均值函数和平方指数核函数,并通过极大似然估计法求解所述高斯过程回归模型的超参数。
15、进一步地,所述步骤s3包括以下子步骤:
16、步骤s301,采用蒙特卡洛的方法对所述高斯过程回归模型进行迭代预测,得到模拟的imu和轮速计输出信号;
17、步骤s302,将所述模拟的imu和轮速计输出信号输入到imu和轮速计组合定位算法,得到模拟的车辆定位点;
18、步骤s303,以所述车辆定位轨迹为基准,通过代价函数计算所述模拟的车辆定位点对应的瞬时代价;
19、步骤s304,重复步骤s301-s303直至达到指定的预测步数,得到模拟的车辆定位轨迹及其期望累积代价。
20、进一步地,所述模拟的车辆定位轨迹的期望累积代价越小,表明所述模拟的车辆定位轨迹越接近所述车辆定位轨迹,进而表明当前imu和轮速计组合定位算法的参数越好。
21、进一步地,所述imu和轮速计组合定位算法的参数的梯度信息通过自动微分技术得到。
22、进一步地,所述imu和轮速计组合定位算法需要更新的参数包括轮胎有效滚动半径、车辆质心位置、卡尔曼滤波算法的过程噪声协方差矩阵和测量噪声协方差矩阵。
23、总的说来,本发明具有如下优点:
24、在绝对定位技术可用的情况下,本发明所提供方法充分利用车辆历史定位轨迹和高性能计算资源,通过高斯过程回归模型和梯度下降算法实现imu和轮速计组合定位算法参数的自适应调整;在绝对定位技术均失效的情况下,相比于固定不变的参数,自适应更新的参数能够减小imu和轮速计组合定位算法的累积误差,提升定位精度。
技术特征:
1.一种提升imu和轮速计组合定位算法精度的方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种提升imu和轮速计组合定位算法精度的方法,其特征在于,所述车辆为辅助驾驶车辆或自动驾驶车辆;所述高性能计算单元包括车载高性能计算单元和云端高性能计算单元。
3.根据权利要求1所述的一种提升imu和轮速计组合定位算法精度的方法,其特征在于,所述绝对定位技术能够提供车辆的绝对位置、姿态信息,包括gnss定位技术、rtk定位技术、视觉定位技术和激光雷达定位技术。
4.根据权利要求1所述的一种提升imu和轮速计组合定位算法精度的方法,其特征在于,所述历史行驶数据包括imu的输出信号、轮速计的输出信号、车辆控制信号以及车辆定位轨迹;所述车辆控制信号包括油门开度、制动踏板开度和方向盘转角数据;所述车辆定位轨迹通过imu与至少一种绝对定位技术融合得到。
5.根据权利要求1所述的一种提升imu和轮速计组合定位算法精度的方法,其特征在于,模拟imu的高斯过程回归模型的训练输入为历史imu输出信号和车辆控制信号,训练输出为历史imu输出信号在相邻采样时刻的变化量;
6.根据权利要求5所述的一种提升imu和轮速计组合定位算法精度的方法,其特征在于,在训练所述高斯过程回归模型时,选择零均值函数和平方指数核函数,并通过极大似然估计法求解所述高斯过程回归模型的超参数。
7.根据权利要求1所述的一种提升imu和轮速计组合定位算法精度的方法,其特征在于,所述步骤s3包括以下子步骤:
8.根据权利要求7所述的一种提升imu和轮速计组合定位算法精度的方法,其特征在于,所述模拟的车辆定位轨迹的期望累积代价越小,表明所述模拟的车辆定位轨迹越接近所述车辆定位轨迹,进而表明当前imu和轮速计组合定位算法的参数越好。
9.根据权利要求1所述的一种提升imu和轮速计组合定位算法精度的方法,其特征在于,所述imu和轮速计组合定位算法的参数的梯度信息通过自动微分技术得到。
10.根据权利要求1-9任一项所述的一种提升imu和轮速计组合定位算法精度的方法,其特征在于,所述imu和轮速计组合定位算法需要更新的参数包括轮胎有效滚动半径、车辆质心位置、卡尔曼滤波算法的过程噪声协方差矩阵和测量噪声协方差矩阵。
技术总结
本发明涉及一种提升IMU和轮速计组合定位算法精度的方法,包括以下步骤:S1,在绝对定位技术可用的情况下,车辆定位模块将历史行驶数据发送至高性能计算单元;S2,根据车辆的历史行驶数据训练高斯过程回归模型,高斯过程回归模型用于模拟产生IMU和轮速计的输出信号;S3,基于训练好的高斯过程回归模型的迭代预测,评估IMU和轮速计组合定位算法的参数;S4,通过梯度下降算法更新IMU和轮速计组合定位算法的参数;S5,将更新后的参数回传给车辆定位模块。利用绝对定位数据实现对IMU和轮速计组合定位算法参数的动态更新;在绝对定位技术失效的情况下,预先更新的参数将能有效提升IMU和轮速计组合定位算法的精度。
技术研发人员:梁志豪,赵克刚,陈浩强
受保护的技术使用者:华南理工大学
技术研发日:
技术公布日:2024/1/5
- 还没有人留言评论。精彩留言会获得点赞!