一种基于三维激光雷达的车厢平衡检测方法和系统与流程
本发明涉及火车偏载检测,尤其涉及一种基于三维激光雷达的车厢平衡检测方法和系统。
背景技术:
1、随着全球经济的快速发展,散货港口的货运活动越来越频繁,货运火车也成为了港口货运过程中不可或缺的一环,然而,在装车楼进行装料时,货运火车出现装料重量分布不均匀的问题,出现偏重及重心不稳的情况,不符合铁路货运标准,甚至存在较大安全隐患。
2、这些问题直接影响了货运火车的运输效率和运输质量,给港口货运工作带来了极大的不便和困扰,因此,为了解决这一问题,需对货运列车的装料过程进行专门的检测和改进,通过现场实地勘察,对物料装车不均匀问题有了更为全面的了解,车厢物料如果呈现出不均匀分布的状态,在运输中会存在车厢侧倾或者触顶的风险。因货运铁路列车的承载重量大,车厢多,物料呈现不均匀分布的特点,故需要对车载物料进行偏载以及平整度检测,以保证运输效率和运输质量。现有方法通常采用轨道衡称重方式,此装置安装较为复杂,需要布设至轨道上,此外建设成本相对较高,对于火车货运装车楼等场景布设较为困难,不易实现轻量化且适用性较强的货运火车偏载检测。
3、针对现有技术中存在的技术问题,本发明提供了一种基于三维激光雷达的车厢平衡检测方法和系统,以解决上述问题。
技术实现思路
1、本发明的目的是为了解决现有技术中存在的缺点,而提出的一种基于三维激光雷达的车厢平衡检测方法和系统。
2、为了实现上述目的,本发明采用了如下技术方案:
3、一种基于三维激光雷达的车厢平衡检测方法,包括以下步骤:
4、s1,以b/s架构构建车厢平衡检测系统,通过标定模块采集激光雷达和相机的标定数据,并对标定数据进行特征点提取和匹配;
5、s2,通过标定模块剔除错误匹配点,使用高置信度匹配点解算激光雷达和相机的外参数,完成标定作业;
6、s3,通过坐标转换模块采集轨道点云数据,并作为标定参照物;
7、s4,通过坐标转换模块采集目标区域点云,统计滤波去除噪声点,拟合轨道平面,提取高置信度点,构造世界坐标系,并解算旋转平移矩阵;
8、s5,通过角点定位模块采集车厢图像数据,识别车厢角点位置,配合旋转平移矩阵将车厢图像数据对应至激光点云中,提取车厢内物料的三维点云数据;
9、s6,通过载重分析模块基于角点定位模块提供的数据来计算分析车厢的载重情况,评估判断车厢是否出现偏载,并由工作人员基于载重分析模块的评估对偏载车厢提出指导意见。
10、优选地,所述s1中,标定数据包括激光雷达点云数据和相机图像数据。
11、优选地,所述s2中,高置信度匹配点的解算方法为透视投影方法。
12、优选地,所述s3中,坐标转换模块包括激光雷达,所述激光雷达固定安装在轨道上方。
13、优选地,所述s4中,目标区域点云通过直通滤波进行提取,所述旋转平移矩阵的解算由svd进行分解求解。
14、优选地,所述s1、s5中,标定模块和角点定位模块均以神经网络模型作为构建基础,所述标定模块通过对照相机和激光雷达的数据作为神经网络模型的训练方法,所述角点定位模块通过采集的车厢顶部图像和标注训练数据集作为神经网络模型的训练方法。
15、优选地,所述s1、s4中,特征点和高置信度点的提取准则均为随机采样一致性算法。
16、优选地,所述s6中,载重分析模块的分析数据包括物料重量分布、前后支撑车轮的受力差值、左右方向重心偏移量、物料偏载区域和物料的平面均匀度,所述物料重量分布的计算方法为多维切片法,所述前后支撑车轮的受力差值和左右方向重心偏移量的计算原理包含车厢受力的静力平衡原理及力矩平衡原理,所述物料偏载区域和物料的平面均匀度的计算方法为曲面拟合和统计学原理。
17、优选地,所述载重分析模块通过分析物料的平面均匀度建立表面标准差和均匀度指数的数学模型。
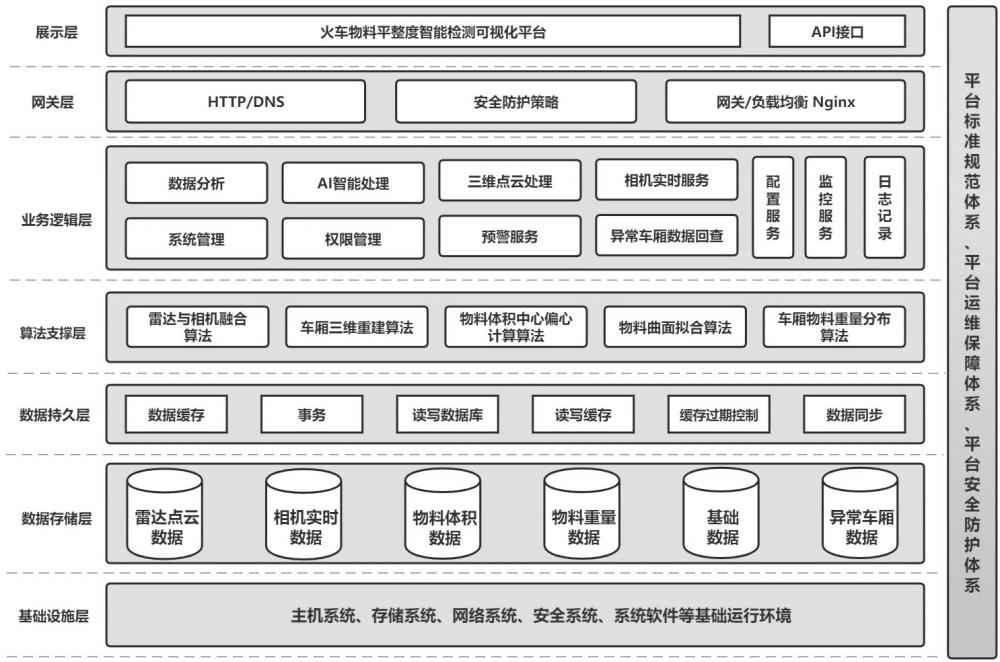
18、本发明还提出了一种基于三维激光雷达的车厢平衡检测系统,该车厢平衡检测系统的平台采用b/s架构,所述车厢平衡检测系统内设有标定模块、坐标转换模块、角点定位模块和载重分析模块,所述车厢平衡检测系统的架构层包括基础设施层、数据储存层、数据持久层、算法支撑层、业务逻辑层、网关层和展示层,所述数据储存层内设有雷达点云数据库、相机实时数据库、物料重量数据库、物料体积数据库、异常车厢数据库、基础数据库,所述算法支撑层内设有雷达与相机融合算法、车厢三维重建算法、物料体积中心偏心计算算法、物料曲面拟合算法、车厢物料重量分布算法
19、本发明与现有技术相比,其有益效果为:
20、本发明通过采用三维激光雷达和相机融合技术对车厢中装填的矿石的堆料平整度进行检测,该方案可精准地检测车厢内物料的偏载及平整度,提高运输效率和运输质量,减少安全隐患的发生,针对货运列车在港口运输中遇到的问题,利用先进的技术手段进行解决,从而保障货运火车运输效率和运输安全,为港口货运工作的顺利进行提供保障。
技术特征:
1.一种基于三维激光雷达的车厢平衡检测方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种基于三维激光雷达的车厢平衡检测方法,其特征在于,所述s1中,标定数据包括激光雷达点云数据和相机图像数据。
3.根据权利要求1所述的一种基于三维激光雷达的车厢平衡检测方法,其特征在于,所述s2中,高置信度匹配点的解算方法为透视投影方法。
4.根据权利要求1所述的一种基于三维激光雷达的车厢平衡检测方法,其特征在于,所述s3中,坐标转换模块包括激光雷达,所述激光雷达固定安装在轨道上方。
5.根据权利要求1所述的一种基于三维激光雷达的车厢平衡检测方法,其特征在于,所述s4中,目标区域点云通过直通滤波进行提取,所述旋转平移矩阵的解算由svd进行分解求解。
6.根据权利要求1所述的一种基于三维激光雷达的车厢平衡检测方法,其特征在于,所述s1、s5中,标定模块和角点定位模块均以神经网络模型作为构建基础,所述标定模块通过对照相机和激光雷达的数据作为神经网络模型的训练方法,所述角点定位模块通过采集的车厢顶部图像和标注训练数据集作为神经网络模型的训练方法。
7.根据权利要求1所述的一种基于三维激光雷达的车厢平衡检测方法,其特征在于,所述s1、s4中,特征点和高置信度点的提取准则均为随机采样一致性算法。
8.根据权利要求1所述的一种基于三维激光雷达的车厢平衡检测方法,其特征在于,所述s6中,载重分析模块的分析数据包括物料重量分布、前后支撑车轮的受力差值、左右方向重心偏移量、物料偏载区域和物料的平面均匀度,所述物料重量分布的计算方法为多维切片法,所述前后支撑车轮的受力差值和左右方向重心偏移量的计算原理包含车厢受力的静力平衡原理及力矩平衡原理,所述物料偏载区域和物料的平面均匀度的计算方法为曲面拟合和统计学原理。
9.根据权利要求8所述的一种基于三维激光雷达的车厢平衡检测方法,其特征在于,所述载重分析模块通过分析物料的平面均匀度建立表面标准差和均匀度指数的数学模型。
10.一种基于三维激光雷达的车厢平衡检测系统,其特征在于,该系统的平台采用b/s架构,所述车厢平衡检测系统内设有标定模块、坐标转换模块、角点定位模块和载重分析模块,所述车厢平衡检测系统的架构层包括基础设施层、数据储存层、数据持久层、算法支撑层、业务逻辑层、网关层和展示层,所述数据储存层内设有雷达点云数据库、相机实时数据库、物料重量数据库、物料体积数据库、异常车厢数据库、基础数据库,所述算法支撑层内设有雷达与相机融合算法、车厢三维重建算法、物料体积中心偏心计算算法、物料曲面拟合算法、车厢物料重量分布算法。
技术总结
本发明公开了一种基于三维激光雷达的车厢平衡检测方法和系统,涉及火车偏载检测技术领域,包括以下步骤:以B/S架构构建车厢平衡检测系统,通过标定模块采集激光雷达和相机的标定数据,并对标定数据进行特征点提取和匹配。本发明还公开了一种基于三维激光雷达的车厢平衡检测系统。本发明通过采用三维激光雷达和相机融合技术对车厢中装填的矿石的堆料平整度进行检测,该方案可精准地检测车厢内物料的偏载及平整度,提高运输效率和运输质量,减少安全隐患的发生,针对货运列车在港口运输中遇到的问题,利用先进的技术手段进行解决,从而保障货运火车运输效率和运输安全,为港口货运工作的顺利进行提供保障。
技术研发人员:雷为,唐筱宁,耿梦迪,刘宇,董军宇,张述,陈中方,孔庆伟,黄振
受保护的技术使用者:海博泰科技(青岛)有限公司
技术研发日:
技术公布日:2024/1/5
- 还没有人留言评论。精彩留言会获得点赞!