一种基于非视距因素的无人机路径规划方法
本发明涉及无人机路径规划,具体涉及一种基于非视距因素的无人机路径规划方法。
背景技术:
1、无人机传统三维路径规划通常考虑对飞行能耗最小、路径最短或时间最短等优化,但城市作战环境下因地形限制以及卫星信号屏蔽等问题,无人机常处于拒止环境。无线定位作为一种拒止环境下的无人机定位方式,在视距充分情况下可以为无人机提供较为精确的位置估计,而在存在大量非视距情况时表现出较差的定位效果。若无人机规划飞行路径时考虑非视距因素影响,则能有效缓解无人机定位误差较大甚至定位失效等问题。
2、如专利号cn202011147730.6公开的一种无人机路径规划方法,将无人机的能量约束、视频传输质量等要求加入路径规划中,并对无人机的总能量损耗进行优化,以减小无人机的总飞行距离以及总起飞次数,提升无人机路径规划的准确性与实用性。但该发明未考虑在卫星拒止下的无人机定位效果,未针对非视距对无线定位的影响进行优化。
3、如专利号cn201810353498.8公开的一种基于非视距误差抑制的室内三维定位方法。该方法通过对非视距误差进行分析,将定位问题转化为一个非线性约束问题,并估计出非视距误差从而将非视距问题转化为视距问题,最后结合线性最小二乘估计,得到准确的三维坐标。但该方法仅根据误差模型对位置估计进行补偿,并没有从减少非视距情况的角度进行考虑。
技术实现思路
1、发明目的:本发明的目的是提供一种基于非视距因素的无人机路径规划方法在构建非视距误差模型的基础上,利用改进的粒子群算法迭代求解最优的无人机飞行路径,实现最小化该路径上的非视距误差,以提高无人机无线定位精度。
2、技术方案:本发明所述的一种基于非视距因素的无人机路径规划方法,包括以下步骤:
3、(1)引入非视距因素,构建非视距偏差模型,并结合路径长度约束构建目标优化函数;
4、(2)通过改进的粒子群算法对目标函数进行迭代优化,计算得出非视距误差最小的无人机路径;包括以下步骤:
5、(21)利用tent映射改进粒子群算法的种群初始化;
6、(22)利用tent映射改进粒子群算法的部分粒子更新方式。
7、进一步的,所述步骤(1)包括以下步骤:
8、(11)构建非视距偏差模型;
9、(12)建立路径长度约束条件;
10、(13)建立目标优化函数。
11、进一步的,所述步骤(11)公式如下:
12、;
13、其中,为墙体的相对介电常数,取值为3.0—9.0;为墙体厚度取值为0.25—0.75m。
14、进一步的,所述步骤(12)路径长度约束条件公式如下:
15、;
16、其中,,,分别为路径在x,y,z上的分量。
17、进一步的,所述步骤(13)目标优化函数公式如下:
18、;
19、其中,,,分别为路径在x,y,z上的分量;表示非视距偏差项系数;为折射角。
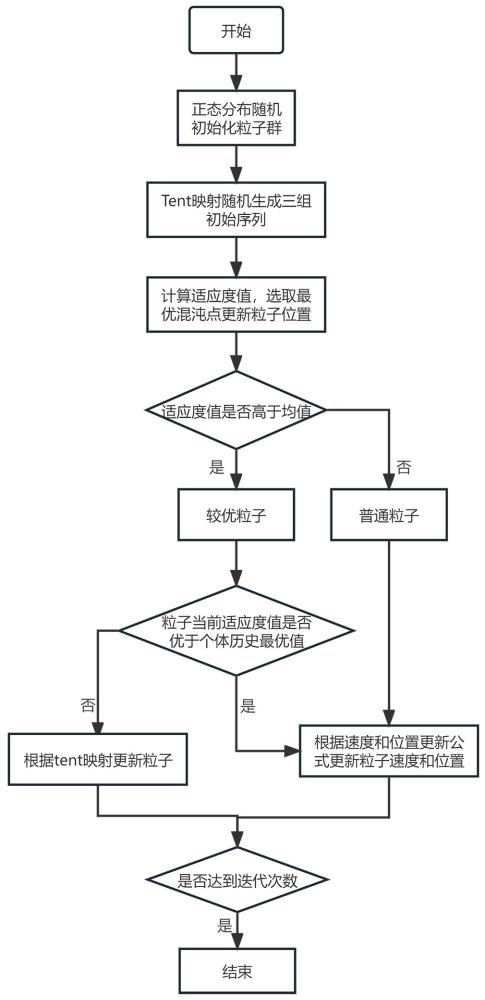
20、进一步的,所述步骤(21)具体如下:将随机生成的粒子位置按公式(4)映射到[0,1];再根据公式(5)进行三次迭代,得到三个混沌点;最后根据公式(6)将混沌点分别映射回原空间,选取适应度值最优的混沌点作为该粒子的新位置;具体公式如下:
21、;
22、;
23、;
24、其中,表示归一化处理后的位置;表示混沌映射得到的结果;表示映射回原空间后的位置;表示单个粒子的维数;表示第维变量的定义域;为混沌参数。
25、进一步的,所述步骤(22)具体如下:在粒子迭代更新过程中,首先评估初始化粒子的适应度值并选出适应度较优的部分粒子,若该部分粒子当前适应度高于历史最优适应度值,则根据tent映射重新获取该粒子的新位置;若低于历史最优适应度值,则与其余粒子一同按照公式(7)(8)进行位置速度更新;具体公式如下:
26、(7);
27、(8);
28、其中,和分别代表第k(k=1,2,...,n)次迭代中第i(i=1,2,...,m)个粒子的速度和位置;w是惯性权重,代表粒子当前速度的影响程度;c1,c2是加速系数,取值为常数;r1,r2是(0,1)间的随机数;和分别代表在迭代k次时粒子i所达到的个体最优解和全局最优解。
29、有益效果:与现有技术相比,本发明具有如下显著优点:引入混沌策略,有效解决粒子群算法易陷入局部最优的不足,扩大全局搜索能力;引入非视距因素,构建非视距偏差模型,同时结合路径长度约束和避障约束,使得所规划的路径在保证非视距误差尽可能小的基础上长度更短,提高定位精度,确保航程优良。
技术特征:
1.一种基于非视距因素的无人机路径规划方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种基于非视距因素的无人机路径规划方法,其特征在于,所述步骤(1)包括以下步骤:
3.根据权利要求2所述的一种基于非视距因素的无人机路径规划方法,其特征在于,所述步骤(11)公式如下:
4.根据权利要求2所述的一种基于非视距因素的无人机路径规划方法,其特征在于,所述步骤(12)路径长度约束条件公式如下:
5.根据权利要求2所述的一种基于非视距因素的无人机路径规划方法,其特征在于,所述步骤(13)目标优化函数公式如下:
6.根据权利要求1所述的一种基于非视距因素的无人机路径规划方法,其特征在于,所述步骤(21)具体如下:将随机生成的粒子位置按公式(4)映射到[0,1];再根据公式(5)进行三次迭代,得到三个混沌点;最后根据公式(6)将混沌点分别映射回原空间,选取适应度值最优的混沌点作为该粒子的新位置;具体公式如下:
7.根据权利要求1所述的一种基于非视距因素的无人机路径规划方法,其特征在于,所述步骤(22)具体如下:在粒子迭代更新过程中,首先评估初始化粒子的适应度值并选出适应度较优的部分粒子,若该部分粒子当前适应度高于历史最优适应度值,则根据tent映射重新获取该粒子的新位置;若低于历史最优适应度值,则与其余粒子一同按照公式(7)(8)进行位置速度更新;具体公式如下:
技术总结
本发明公开了一种基于非视距因素的无人机路径规划方法,包括以下步骤:(1)引入非视距因素,构建非视距偏差模型,并结合路径长度约束构建目标优化函数;(2)通过改进的粒子群算法对目标函数进行迭代优化,计算出最终得出非视距误差最小的无人机路径;本发明引入混沌策略,有效解决粒子群算法易陷入局部最优的不足,扩大全局搜索能力;引入非视距因素,构建非视距偏差模型,同时结合路径长度约束和避障约束,使得所规划的路径在保证非视距误差尽可能小的基础上长度更短,提高定位精度,确保航程优良。
技术研发人员:敖洋钒,刘云平,潘慧婷,牛天宇,周朝杰
受保护的技术使用者:南京信息工程大学
技术研发日:
技术公布日:2024/1/5
- 还没有人留言评论。精彩留言会获得点赞!