一种复杂工况下的光伏清洁机器人运行路径规划方法
本发明涉及路径规划,具体涉及一种复杂工况下的光伏清洁机器人运行路径规划方法。
背景技术:
1、光伏清洁机器人的运行逻辑目前受到多种因素的制约,主要包括使用普通换行、atk定位技术以及传统清洁机器人的slam方式。这些方式在不同方面都存在缺陷,特别是在特定背景环境下,它们的运行可能会受到限制。
2、普通换行:普通换行方式通常是光伏清洁机器人的初始选择,因为它们相对简单且成本较低。然而,在复杂的户外环境中,这种方式的适用性受到很大限制。光伏电池板往往分布在大片的户外区域,其中有各种地形、障碍物和不均匀的表面。普通换行无法应对这些复杂的地形和环境,导致清洁机器人无法有效地完成任务,容易卡在障碍物或陷入困境。
3、atk定位技术:虽然atk(absolute track and know)定位技术在一定程度上提高了光伏清洁机器人的定位准确性,但它仍然存在一些局限性。首先,atk依赖于特定类型的标志或标记来进行定位,这意味着需要在太阳能电池板上布置这些标记,这在实践中可能并不实际。此外,障碍物遮挡和定位精度问题仍然存在,因为atk系统可能无法有效地识别或跟踪标记,尤其是在不断变化的户外环境中。
4、传统清洁机器人的slam方式:传统的清洁机器人使用slam(simultaneouslocalization and mapping)技术,通过摄像头拍摄周围环境以定位自身并规划清洁路径。然而,这种方式在户外光伏清洁领域存在重大缺陷。户外环境的光照和天气条件可能会对摄像头的性能产生负面影响,从而影响定位的准确性。此外,户外环境中的不稳定性和多样性使slam方式难以应对复杂的光伏电池板布局。
5、在当前的背景环境下,为了克服上述问题,需要寻找新的运行逻辑和技术解决方案,以提高光伏清洁机器人的效率和适应性。为此,提出一种复杂工况下的光伏清洁机器人运行路径规划方法。
技术实现思路
1、本发明所要解决的技术问题在于:如何解决多个随机分布区域连接后的路径规划问题,提供了一种复杂工况下的光伏清洁机器人运行路径规划方法,通过对光伏清洁机器人运行路径的更合理规划,提高光伏清洁机器人的效率和适应性,更适用于复杂工况条件下的光伏电池板清洁工作。
2、本发明是通过以下技术方案解决上述技术问题的,本发明包括以下步骤:
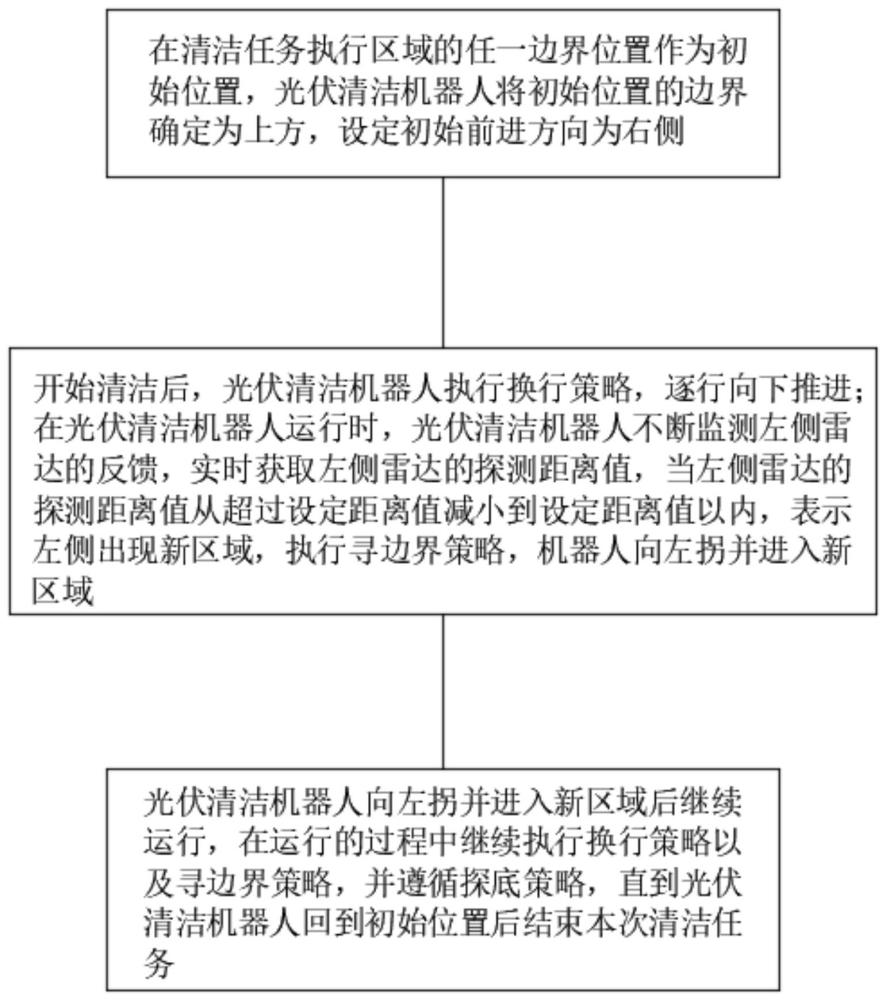
3、s1:在清洁任务执行区域的任一边界位置作为初始位置,光伏清洁机器人将初始位置的边界确定为上方,设定初始前进方向为右侧;
4、s2:开始清洁后,光伏清洁机器人执行换行策略,逐行向下推进;在光伏清洁机器人运行时,光伏清洁机器人不断监测左侧雷达的反馈,实时获取左侧雷达的探测距离值,当左侧雷达的探测距离值从超过设定距离值减小到设定距离值以内,表示左侧出现新区域,执行寻边界策略,机器人向左拐并进入新区域;
5、s3:光伏清洁机器人向左拐并进入新区域后继续运行,在运行的过程中继续执行换行策略以及寻边界策略,并遵循探底策略,直到光伏清洁机器人回到初始位置后结束本次清洁任务。
6、更进一步地,所述步骤s1~s3中,当光伏清洁机器人沿边界运行时,光伏清洁机器人的左部雷达位置处于边界外,探测距离值超过设定值。
7、更进一步地,所述左部雷达、前部雷达、右部雷达均安装在光伏清洁机器人的下端,均向垂直于光伏电池板所在平面的方向探测,其中,前部雷达位于左部雷达、右部雷达的前方,左部雷达、右部雷达位于与光伏清洁机器人的轴线垂直的同一直线上,且该直线与光伏清洁机器人所在平面平行。
8、更进一步地,在所述步骤s2、s3中,在光伏清洁机器人运行过程中,根据运行方向以及前部雷达、左部雷达、右部雷达的探测距离值与设定距离值之间的关系判断当前位置是否为左拐角或右拐角。
9、更进一步地,在所述步骤s2中,换行策略如下:在光伏清洁机器人到达光伏电池板的左右边界时,机器人进行向下的换行动作,然后向反方向运行,以继续清洁任务。
10、更进一步地,在所述步骤s3中,在执行寻边界策略时,需要遵循探底策略,探底策略如下:当光伏清洁机器人在当前区域进行清洁时,如果尚未达到右拐角或左拐角,未能获得探底机会,并且此时正在执行向左的直线行驶,当左部雷达的探测距离值从超出设定距离值变成设定距离值以内时,则表明前面下方出现新区域,由于光伏清洁机器人未到达当前区域底端左右拐角,故不能提前进入前面下方新区域,光伏清洁机器人执行掉头操作并返回。
11、更进一步地,所述探底机会的触发方式如下:当光伏清洁机器人在运行中到达左或右拐角,将获得一次探底机会,在光伏清洁机器人向左运行的过程中,如果左部雷达的探测距离值从设定距离值以内变成超出设定距离值,光伏清洁机器人将继续前进;在向左侧运行的过程中,如果左部雷达的探测距离值从超出设定距离值变成设定距离值以内时,表明前方存在下方区域需要进行向下探索;此时,拥有探底机会的光伏清洁机器人将执行左拐动作,进入下方区域,并执行换行策略,逐行向下推进。
12、更进一步地,左拐角是下边界与此下边界以上区域左侧边界的交界处,右拐角是下边界与此下边界以上区域右侧边界的交界处;其中,以初始位置为基准,当任意光伏电池板的下方不与其他光伏电池板连接时,则该光伏电池板的下边即为下边界或下边界的一部分。
13、更进一步地,当光伏清洁机器人完成了一次向下运行的动作,探底机会将被取消,向下运行的动作包括执行换行策略中的向下运行动作,但不包括掉头动作。
14、更进一步地,在所述步骤s3中,初始位置区域设置为全白或全黑,当光伏清洁机器人到达初始位置区域后,通过其下端设置的多个漫反射传感器识别到该特征信息,即可确认当前位置为初始位置,进而结束光伏清洁机器人的运行,结束本次清洁任务。
15、本发明相比现有技术具有以下优点:该复杂工况下的光伏清洁机器人运行路径规划方法,通过引入了寻边界策略和探底策略,寻边界策略扩大了光伏清洁机器人在运行中的探索范围,而探底策略则确保光伏清洁机器人在进入新区域并完成整块区域的清洁任务后,能够有效返回之前的区域,以继续清理未完成的部分,进而提高了光伏清洁机器人的效率和适应性,使其更好地应对复杂环境的挑战。
技术特征:
1.一种复杂工况下的光伏清洁机器人运行路径规划方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种复杂工况下的光伏清洁机器人运行路径规划方法,其特征在于:在所述步骤s1~s3中,当光伏清洁机器人沿边界运行时,光伏清洁机器人的左部雷达位置处于边界外,探测距离值超过设定值。
3.根据权利要求2所述的一种复杂工况下的光伏清洁机器人运行路径规划方法,其特征在于:所述左部雷达、前部雷达、右部雷达均安装在光伏清洁机器人的下端,均向垂直于光伏电池板所在平面的方向探测,其中,前部雷达位于左部雷达、右部雷达的前方,左部雷达、右部雷达位于与光伏清洁机器人的轴线垂直的同一直线上,且该直线与光伏清洁机器人所在平面平行。
4.根据权利要求3所述的一种复杂工况下的光伏清洁机器人运行路径规划方法,其特征在于:在所述步骤s2、s3中,在光伏清洁机器人运行过程中,根据运行方向以及前部雷达、左部雷达、右部雷达的探测距离值与设定距离值之间的关系判断当前位置是否为左拐角或右拐角。
5.根据权利要求4所述的一种复杂工况下的光伏清洁机器人运行路径规划方法,其特征在于:在所述步骤s2中,换行策略如下:在光伏清洁机器人到达光伏电池板的左右边界时,机器人进行向下的换行动作,然后向反方向运行,以继续清洁任务。
6.根据权利要求5所述的一种复杂工况下的光伏清洁机器人运行路径规划方法,其特征在于:在所述步骤s3中,在执行寻边界策略时,需要遵循探底策略,探底策略如下:当光伏清洁机器人在当前区域进行清洁时,如果尚未达到右拐角或左拐角,未能获得探底机会,并且此时正在执行向左的直线行驶,当左部雷达的探测距离值从超出设定距离值变成设定距离值以内时,则表明前面下方出现新区域,由于光伏清洁机器人未到达当前区域底端左右拐角,故不能提前进入前面下方新区域,光伏清洁机器人执行掉头操作并返回。
7.根据权利要求6所述的一种复杂工况下的光伏清洁机器人运行路径规划方法,其特征在于:所述探底机会的触发方式如下:当光伏清洁机器人在运行中到达左或右拐角,将获得一次探底机会,在光伏清洁机器人向左运行的过程中,如果左部雷达的探测距离值从设定距离值以内变成超出设定距离值,光伏清洁机器人将继续前进;在向左侧运行的过程中,如果左部雷达的探测距离值从超出设定距离值变成设定距离值以内时,表明前方存在下方区域需要进行向下探索;此时,拥有探底机会的光伏清洁机器人将执行左拐动作,进入下方区域,并执行换行策略,逐行向下推进。
8.根据权利要求7所述的一种复杂工况下的光伏清洁机器人运行路径规划方法,其特征在于:左拐角是下边界与此下边界以上区域左侧边界的交界处,右拐角是下边界与此下边界以上区域右侧边界的交界处;其中,以初始位置为基准,当任意光伏电池板的下方不与其他光伏电池板连接时,则该光伏电池板的下边即为下边界或下边界的一部分。
9.根据权利要求8所述的一种复杂工况下的光伏清洁机器人运行路径规划方法,其特征在于:当光伏清洁机器人完成了一次向下运行的动作,探底机会将被取消,向下运行的动作包括执行换行策略中的向下运行动作,但不包括掉头动作。
10.根据权利要求1或9所述的一种复杂工况下的光伏清洁机器人运行路径规划方法,其特征在于:在所述步骤s3中,初始位置区域设置为全白或全黑,当光伏清洁机器人到达初始位置区域后,通过其下端设置的多个漫反射传感器识别到该特征信息,即可确认当前位置为初始位置,进而结束光伏清洁机器人的运行,结束本次清洁任务。
技术总结
本发明公开了一种复杂工况下的光伏清洁机器人运行路径规划方法,属于路径规划技术领域。本发明通过引入了寻边界策略和探底策略,寻边界策略扩大了光伏清洁机器人在运行中的探索范围,而探底策略则确保光伏清洁机器人在进入新区域并完成整块区域的清洁任务后,能够有效返回之前的区域,以继续清理未完成的部分,进而提高了光伏清洁机器人的效率和适应性,使其更好地应对复杂环境的挑战。
技术研发人员:周白玉,李飞,吴磊
受保护的技术使用者:安徽工业大学
技术研发日:
技术公布日:2024/3/4
- 还没有人留言评论。精彩留言会获得点赞!