一种航向信息确定方法及装置与流程
本申请涉及车载定位定向,尤其涉及一种航向信息确定方法及装置。
背景技术:
1、车载定位定向系统一般由惯导、里程计及高程计组成,长时间工作时,系统航向误差将增大,不能满足长航时导航精度要求。
2、目前,车载定位定向系统大多采用捷联惯性/里程计组合导航方法实现航向保持,长时间工作时,随着系统温度上升及车载环境的复杂性导致陀螺和加速度计零偏变化,而长航时工作捷联惯性/里程计组合导航方法中陀螺及加速度计零偏估计不准确,导致航向误差增大。因此,亟需一种航向信息确定方法。
技术实现思路
1、本申请提供一种航向信息确定方法及装置,以解决现有技术中长航时工作捷联惯性/里程计组合导航方法中陀螺及加速度计零偏估计不准确,导致航向误差增大的问题。
2、第一方面,本申请提供了一种航向信息确定方法,所述方法应用于导航系统,其中,所述导航系统包括捷联惯导、里程计;所述方法包括:
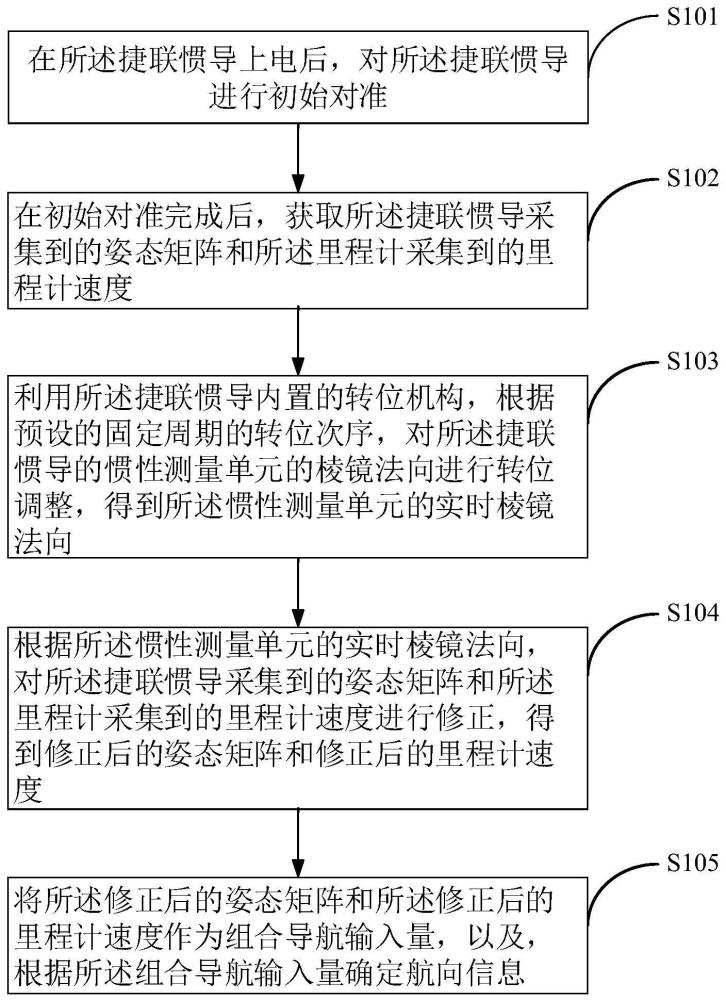
3、在所述捷联惯导上电后,对所述捷联惯导进行初始对准;
4、在初始对准完成后,获取所述捷联惯导采集到的姿态矩阵和所述里程计采集到的里程计速度;
5、利用所述捷联惯导内置的转位机构,根据预设的固定周期的转位次序,对所述捷联惯导的惯性测量单元的棱镜法向进行转位调整,得到所述惯性测量单元的实时棱镜法向;
6、根据所述惯性测量单元的实时棱镜法向,对所述捷联惯导采集到的姿态矩阵和所述里程计采集到的里程计速度进行修正,得到修正后的姿态矩阵和修正后的里程计速度;
7、将所述修正后的姿态矩阵和所述修正后的里程计速度作为组合导航输入量,以及,根据所述组合导航输入量确定航向信息。
8、第二方面,本申请提供了一种航向信息确定装置,所述装置应用于导航系统,其中,所述导航系统包括捷联惯导、里程计;所述装置包括:
9、初始化单元,用于在所述捷联惯导上电后,对所述捷联惯导进行初始对准;
10、获取单元,用于在初始对准完成后,获取所述捷联惯导采集到的姿态矩阵和所述里程计采集到的里程计速度;
11、调整单元,用于利用所述捷联惯导内置的转位机构,根据预设的固定周期的转位次序,对所述捷联惯导的惯性测量单元的棱镜法向进行转位调整,得到所述惯性测量单元的实时棱镜法向;
12、修正单元,用于根据所述惯性测量单元的实时棱镜法向,对所述捷联惯导采集到的姿态矩阵和所述里程计采集到的里程计速度进行修正,得到修正后的姿态矩阵和修正后的里程计速度;
13、确定单元,用于将所述修正后的姿态矩阵和所述修正后的里程计速度作为航向信息。
14、第三方面,本申请提供了一种可读介质,包括执行指令,当电子设备的处理器执行所述执行指令时,所述电子设备执行如第一方面中任一所述的方法。
15、第四方面,本申请提供了一种电子设备,包括处理器以及存储有执行指令的存储器,当所述处理器执行所述存储器存储的所述执行指令时,所述处理器执行如第一方面中任一所述的方法。
16、由上述技术方案可以看出,本申请提供的航向信息确定方法应用于导航系统,其中,所述导航系统包括捷联惯导、里程计;所述方法包括:在所述捷联惯导上电后,对所述捷联惯导进行初始对准;在初始对准完成后,获取所述捷联惯导采集到的姿态矩阵和所述里程计采集到的里程计速度;利用所述捷联惯导内置的转位机构,根据预设的固定周期的转位次序,对所述捷联惯导的惯性测量单元的棱镜法向进行转位调整,得到所述惯性测量单元的实时棱镜法向;根据所述惯性测量单元的实时棱镜法向,对所述捷联惯导采集到的姿态矩阵和所述里程计采集到的里程计速度进行修正,得到修正后的姿态矩阵和修正后的里程计速度;将所述修正后的姿态矩阵和所述修正后的里程计速度作为航向信息。本申请通过利用所述捷联惯导内置的转位机构,根据预设的固定周期的转位次序,对所述捷联惯导的惯性测量单元的棱镜法向进行转位调整,从而利用所述惯性测量单元的实时棱镜法向,对所述捷联惯导采集到的姿态矩阵和所述里程计采集到的里程计速度进行修正,进而将所述修正后的姿态矩阵和所述修正后的里程计速度作为航向信息;这样,本申请便可以实现利用捷联惯导中内置的转位机构实现陀螺和加速度计的旋转调制,实现了基于旋转调制的车载惯性/里程计长航时航向保持方法,可以自动抵消除轴向(旋转轴方向)误差外的常值误差源,提高了系统长航时航向精度,即提高了航向信息的精度。
17、上述的非惯用的优选方式所具有的进一步效果将在下文中结合具体实施方式加以说明。
技术特征:
1.一种航向信息确定方法,其特征在于,所述方法应用于导航系统,其中,所述导航系统包括捷联惯导、里程计;所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述预设的固定周期的转位次序为:
3.根据权利要求2所述的方法,其特征在于,所述根据所述惯性测量单元的实时棱镜法向,对所述捷联惯导采集到的姿态矩阵进行修正,得到修正后的姿态矩阵,包括:
4.根据权利要求3所述的方法,其特征在于,从惯性测量单元坐标系转换至载体坐标系的姿态转移矩阵的确定方式为:其中,为从惯性测量单元坐标系转换至载体坐标系的姿态转移矩阵,为从内框零位坐标系转换至载体坐标系的姿态转移矩阵,为从惯性测量单元坐标系转换至内框零位坐标系的姿态转移矩阵,为东北天导航坐标系转换至惯性测量单元坐标系的姿态转移矩阵。
5.根据权利要求4所述的方法,其特征在于,
6.根据权利要求4所述的方法,其特征在于,
7.根据权利要求2所述的方法,其特征在于,所述根据所述惯性测量单元的实时棱镜法向,对所述里程计采集到的里程计速度进行修正,得到修正后的里程计速度,包括:
8.根据权利要求1所述的方法,其特征在于,所述将所述修正后的姿态矩阵和所述修正后的里程计速度作为组合导航输入量,以及,根据所述组合导航输入量确定航向信息,包括:
9.一种航向信息确定装置,其特征在于,所述装置应用于导航系统,其中,所述导航系统包括捷联惯导、里程计;所述装置包括:
10.一种电子设备,其特征在于,所述电子设备包括处理器以及存储有执行指令的存储器,当所述处理器执行所述存储器存储的所述执行指令时,所述处理器执行如权利要求1-8中任一所述的方法。
技术总结
本申请公开了一种航向信息确定方法,该方通过利用所述捷联惯导内置的转位机构,根据预设的固定周期的转位次序,对所述捷联惯导的惯性测量单元的棱镜法向进行转位调整,从而利用所述惯性测量单元的实时棱镜法向,对所述捷联惯导采集到的姿态矩阵和所述里程计采集到的里程计速度进行修正,进而将所述修正后的姿态矩阵和所述修正后的里程计速度作为航向信息;这样,本申请便可以实现利用捷联惯导中内置的转位机构实现陀螺和加速度计的旋转调制,实现了基于旋转调制的车载惯性/里程计长航时航向保持方法,可以自动抵消除轴向(旋转轴方向)误差外的常值误差源,提高了系统长航时航向精度,即提高了航向信息的精度。
技术研发人员:李先慕,张靖,李煜豪,贺纪亮,孙谦,李海洲,刘宇航,王晨冉,陈为,刘希强,秦温温,常健健
受保护的技术使用者:北京航天发射技术研究所
技术研发日:
技术公布日:2024/3/12
- 还没有人留言评论。精彩留言会获得点赞!