一种基于条纹结构光投影的三维测量方法及系统与流程
本发明涉及三维测量,具体而言,涉及一种基于条纹结构光投影的三维测量方法及系统。
背景技术:
1、相机通过小孔成像原理,可用于获取周围世界场景的图片,这种方式得到的是三维世界的一个平面投影,无法获取物体的三维深度信息,于是三维成像技术应运而生,能够获取物体的三维形貌信息,并且以点云的形式表现。点云是一个由数百甚至数百万个坐标点构成的数据集,在三维空间中表示了物体表面的形状和轮廓。
2、目前,常见的三维成像技术包括时序飞行(tof)、激光三角法和结构光技术,其中结构光技术因其成像精度高而被广泛应用于对精度要求较高的场景中,结构光成像原理是通过光机将事先设定的特定条纹结构光图案投射到物体表面,然后通过图像解码得到物体的三维形状信息。然而,传统的结构光成像方法存在以下问题:在投影成像时需要投射较多的条纹结构光图案,实际操作实施起来较为复杂麻烦;每次三维成像过程耗时较长,影响三维测量的速度,限制了该技术的实际应用效率。
3、因此,我们有必要开发出一种基于条纹结构光投影的三维测量方法及系统,能减少需要投射的条纹结构光图案数量,缩短每次三维成像过程耗时,提高三维投影测量效率,且成像精度高。
技术实现思路
1、本发明的目的在于提供一种基于条纹结构光投影的三维测量方法及系统,以解决上述背景技术中提到的现有结构光投影成像三维测量方法中需要投射较多的条纹结构光图案、成像过程耗时较长等问题。
2、为实现上述目的,本发明采用以下技术方案:
3、根据本发明的一个方面,提供一种基于条纹结构光投影的三维测量方法,所述方法具体如下:
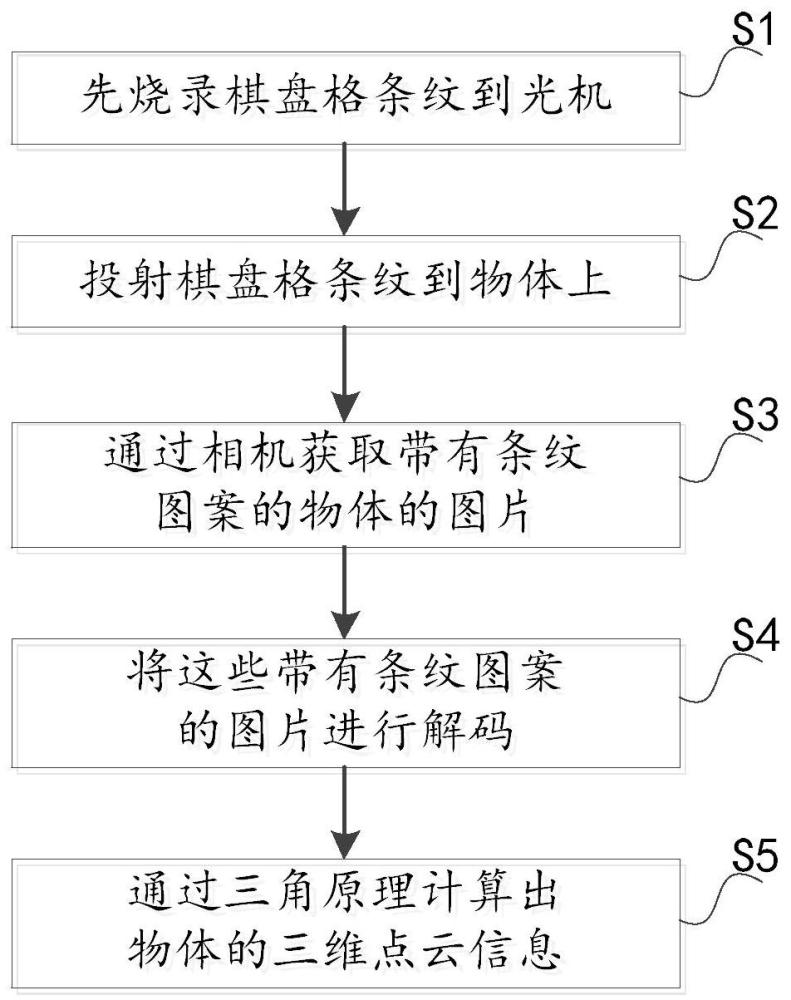
4、烧录棋盘格条纹图案到光机内部;
5、将所述光机调整为离焦状态,通过代码控制所述光机投射所述棋盘格条纹图案到物体上;
6、通过相机获取带有所述棋盘格条纹图案的所述物体的图片;
7、计算所述图片的每个像素点上的解码值来解码,使用算法识别出所述棋盘格图案的角点,得到角点的位置信息;
8、基于所述解码值,根据三角原理计算出所述物体的三维点云信息。
9、基于前述方案,所述烧录棋盘格条纹图案到光机时,需要的所述棋盘格条纹图案数量低于使用格雷码条纹时所需数量。
10、基于前述方案,所述棋盘格条纹图案数量只需要a张,a<10。
11、基于前述方案,所述将所述光机调整为离焦状态后,所述棋盘格条纹将被离焦为近似正弦条纹,每个周期的强度值可近似为:f(x)=sin(kx),其中:k的取值与棋盘格的尺寸有关,k=2*∏/(960/z),z为棋盘格的尺寸,∏为圆周率。
12、基于前述方案,所述计算所述图片的每个像素点上的解码值来解码,包括:
13、使用算法识别出所述棋盘格图案的角点,得到角点的位置信息;
14、计算所述每个像素点上的解码值,具体为:ci(x,y)=six+siy+pi(x,y);six表示识别到的棋盘格角点的位置的第一个值;siy表示识别到的棋盘格角点的位置的第二个值;ci(x,y)表示在(x,y)像素位置的解码值;pi(x,y)表示第i张条纹图案在(x,y)像素位置的像素值;i表示第i张图片,i>1;
15、将所有图片在同一像素位置的解码值相加得到最终解码值,计算公式为:
16、其中c(x,y)表示每个像素位置(x,y)的最终解码值,ci(x,y)第i张图片在像素位置(x,y)处的解码值。
17、基于前述方案,所述三角原理具体为:
18、根据摄像头的光斑成像位置,空间的一个点投影到左相机和投影到右相机上的位置有相似三角形的关系,利用相似三角形的几何关系计算距离。
19、根据本发明的一个方面,提供一种基于条纹结构光投影的三维测量系统,所述系统包括:
20、棋盘格条纹投射模块,用于将烧录棋盘格条纹图案到光机内部,并通过代码控制所述光机投射所述棋盘格条纹图案到物体上;
21、物体图片获取模块,用于通过相机获取带有所述棋盘格条纹图案的所述物体的图片;
22、物体图片解码模块,用于计算所述图片的每个像素点上的解码值来解码;
23、物体三维信息计算模块,用于基于所述解码值,根据三角原理计算出所述物体的三维点云信息。
24、基于前述方案,所述物体图片解码模块包括:
25、角点信息识别单元,用于使用算法识别出所述棋盘格图案的角点,得到角点的位置信息;
26、像素点解码值计算单元,用于计算所述每个像素点上的解码值;
27、最终解码值计算单元,用于将所有图片在同一像素位置的解码值相加得到最终解码值。
28、基于前述方案,所述物体三维信息计算模块包括:
29、三角原理计算单元,用于根据三角原理计算出点在空间中的位置;
30、三维点云计算单元,用于根据三角原理计算出来的点的位置,计算出物体的三维点云信息。
31、由上述技术方案可知,本发明与现有技术相比至少具备以下优点和积极效果:
32、(1)在投影成像时仅需要投射少数几张的棋盘格条纹结构光图案,比使用格雷码条纹图案数量更少,相对来说实际操作实施起来更为简单;
33、(2)每次三维成像过程耗时较短,加快三维测量的速度,提高了该技术的实际应用效率;
34、(3)成像的精度和使用纯格雷得到的精度相比,不会逊色,甚至略有提升,但成像速度方面却远快于使用纯格雷码进行三维测量成像时的速度。
技术特征:
1.一种基于条纹结构光投影的三维测量方法,其特征在于,包括:
2.根据权利要求1所述的一种基于条纹结构光投影的三维测量方法,其特征在于,所述烧录棋盘格条纹图案到光机时,所述棋盘格条纹图案数量少于使用格雷码条纹时所需数量。
3.根据权利要求1所述的一种基于条纹结构光投影的三维测量方法,其特征在于,所述棋盘格条纹图案数量为a张,a<10。
4.根据权利要求1所述的一种基于条纹结构光投影的三维测量方法,其特征在于,所述将所述光机调整为离焦状态后,所述棋盘格条纹将被离焦为近似正弦条纹,每个周期的强度值可近似为:f(x)=sin(kx),其中:
5.根据权利要求1所述的一种基于条纹结构光投影的三维测量方法,其特征在于,所述计算所述图片的每个像素点上的解码值来解码,还包括:
6.根据权利要求1所述的一种基于条纹结构光投影的三维测量方法,其特征在于,所述计算所述图片的每个像素点上的解码值来解码,还包括:
7.根据权利要求1所述的一种基于条纹结构光投影的三维测量方法,其特征在于,所述三角原理具体为:
8.一种基于条纹结构光投影的三维测量系统,其特征在于,所述系统包括:
9.根据权利要求8所述的一种基于条纹结构光投影的三维测量系统,其特征在于,所述物体图片解码模块包括:
10.根据权利要求8所述的一种基于条纹结构光投影的三维测量系统,其特征在于,所述物体三维信息计算模块包括:
技术总结
本发明属于三维测量技术领域,提供了一种基于条纹结构光投影的三维测量方法及系统。通过烧录棋盘格条纹到光机,通过代码控制调成离焦状态的光机投射棋盘格图案到物体上,使用双目成像设备获取带有条纹图案的物体的图片并对所述图片每个像素点上的值进行计算解码值来解码,将所有图片的同一像素位置的解码值相加得到最终解码值,根据摄像头的光斑成像位置,利用相似三角形的几何关系计算距离计算出物体的三维点云信息。解决了现有结构光三维投影测量需要烧录较多条纹图片,成像时需要投射较多的结构光的图案以及比较耗时的问题,减少需要烧录的条纹图案数量,提高物体三维投影测量效率。
技术研发人员:王念欧,郦轲,苏丁鹏,万进
受保护的技术使用者:深圳市宗匠科技有限公司
技术研发日:
技术公布日:2024/2/29
- 还没有人留言评论。精彩留言会获得点赞!