巡逻机器人的后盖物体检测方法、装置、介质及设备与流程
本发明涉及机器人,尤其涉及巡逻机器人的后盖物体检测方法、装置、介质及设备。
背景技术:
1、当巡逻机器人在人流量大的园区、商场或者其他预设场景中移动时,容易引起用户的兴趣,出现比如小朋友坐到或爬到巡逻机器人的后盖上,从而产生较大的安全隐患,必须对巡逻机器人后盖进行检测,判断是否存在人体或物体。
2、现有的物体检测主要为应用于室内环境的物体检测,采用支持向量机训练的方式或者大数据建模。然而巡逻机器人工作在室外,室外环境中的样本不均衡容易导致支持向量机倾向于将训练样本归类为负样本,从而影响物体检测的准确性;且大数据的训练时间、系统成本高,对巡逻机器人的部署和推广有比较大的限制。
技术实现思路
1、本发明实施例提供了一种巡逻机器人的后盖物体检测方法、装置、介质及设备,以解决现有技术在巡逻机器人上应用物体检测时存在的准确性低、成本高、限制大的问题。
2、一种巡逻机器人的后盖物体检测方法,所述方法包括:
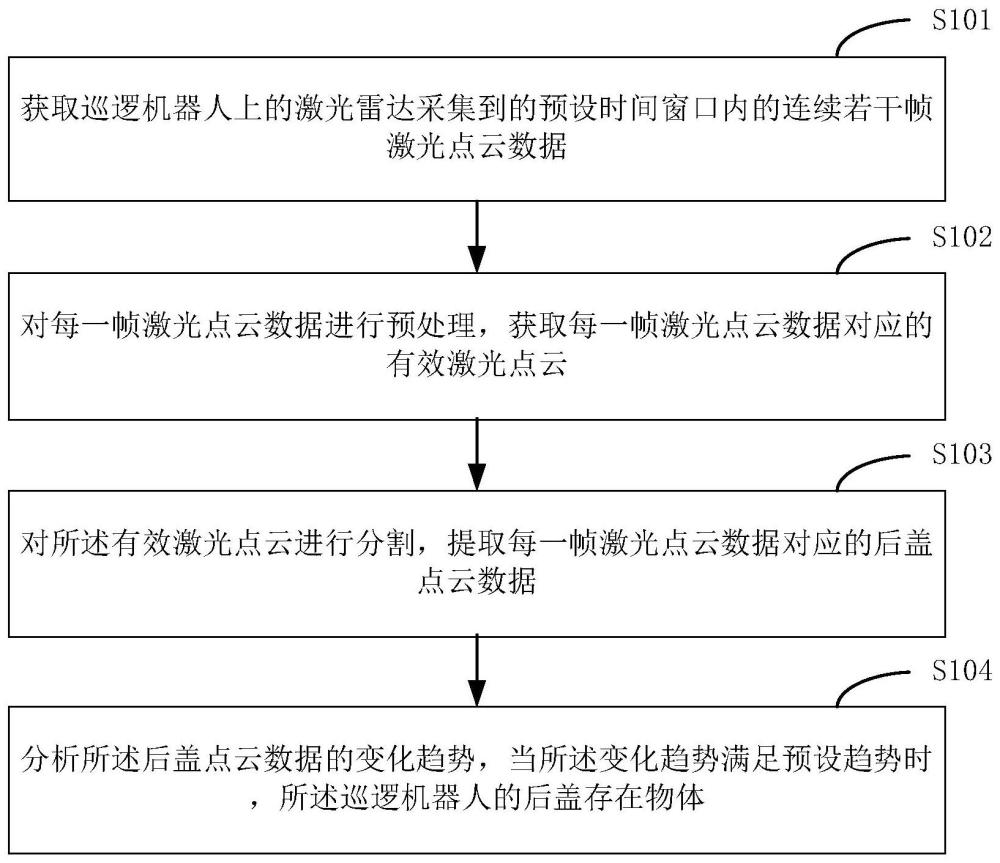
3、获取巡逻机器人上的激光雷达采集到的预设时间窗口内的连续若干帧激光点云数据;
4、对每一帧激光点云数据进行预处理,获取每一帧激光点云数据对应的有效激光点云;
5、对所述有效激光点云进行分割,提取每一帧激光点云数据对应的后盖点云数据;
6、分析所述后盖点云数据的变化趋势,当所述变化趋势满足预设趋势时,所述巡逻机器人的后盖存在物体。
7、可选地,所述对每一帧激光点云数据进行预处理,获取每一帧激光点云数据对应的有效激光点云包括:
8、采用预设算法检测并去除所述激光点云数据中的异常数据点;
9、采用不同尺度的滤波方式滤除所述激光点云数据中的噪声信息;
10、采用三角网格插值方法对所述激光点云数据中的缺失点进行填补。
11、可选地,所述采用三角网格插值方法对所述激光点云数据中的缺失点进行填补包括:
12、将每一帧激光点云数据转换为三角网格数据结构;
13、针对每一帧激光点云数据,获取所述激光点云数据中的nan值或者无效值,作为待填补的缺失点;
14、在所述三角网格数据结构中获取所述缺失点的至少两个最邻近激光点;
15、根据所述缺失点与最邻近激光点的距离信息计算线性插值权重信息;
16、根据所述线性插值权重信息和最邻近激光点的属性信息进行插值运算,得到所述缺失点的属性信息。
17、可选地,所述对所述有效激光点云进行分割,提取每一帧激光点云数据对应的后盖点云数据包括:
18、获取预设的最大高度阈值和最小高度阈值,从所述有效激光点云中分割出小于所述最大高度阈值且大于所述最小高度阈值的激光点云,得到第一区域点云;
19、获取预设的水平宽度范围和水平长度范围,从所述第一区域点云中分割出落入所述水平宽度范围和水平长度范围内的激光点云,得到第二区域点云。
20、其中,所述最大高度阈值是指激光雷达坐标系中的最大z轴高度,所述最小高度阈值是指激光雷达坐标系中的最小z轴高度;所述水平宽度范围是指巡逻机器人的后盖区域在激光雷达坐标系中的x轴宽度,水平长度范围是指巡逻机器人的后盖区域在激光雷达坐标系中的y轴宽度。
21、可选地,所述对所述有效激光点云进行分割,提取每一帧激光点云数据对应的后盖点云数据还包括:
22、获取预设的遮挡物的角度区间,从所述第二区域点云中滤除所述遮挡物的角度区间内的激光点云;
23、其中,所述遮挡物的角度区间是指遮挡物在激光雷达坐标系中对应的水平角度范围。
24、可选地,所述对所述有效激光点云进行分割,提取每一帧激光点云数据对应的后盖点云数据还包括:
25、采用随机采样一致性算法拟合所述巡逻机器人的后盖平面模型;
26、采用主成分分析法计算所述第二区域点云中的激光点的法向量;
27、分割出法向量与所述后盖平面模型不一致的激光点;
28、组合所述分割出来的激光点,得到后盖点云数据。
29、可选地,所述分析所述后盖点云数据的变化趋势,当所述变化趋势满足预设趋势时,所述巡逻机器人的后盖存在物体包括:
30、分别计算所述预设时间窗口内的每一帧激光点云数据对应的后盖点云数据的点云数量;
31、获取所述预设时间窗口内的点云数量的平均值和标准差;
32、分别比较所述平均值和点云均值阈值,比较所述标准差和点云标差阈值;
33、若所述平均值大于所述点云均值阈值且所述标准差小于所述点云标差阈值,则所述巡逻机器人的后盖存在物体。
34、一种巡逻机器人的后盖物体检测装置,所述装置包括:
35、获取模块,用于获取巡逻机器人上的激光雷达采集到的预设时间窗口内的连续若干帧激光点云数据;
36、预处理模块,用于对每一帧激光点云数据进行预处理,获取每一帧激光点云数据对应的有效激光点云;
37、分割模块,用于对所述有效激光点云进行分割,提取每一帧激光点云数据对应的后盖点云数据;
38、分析模块,用于分析所述后盖点云数据的变化趋势,当所述变化趋势满足预设趋势时,所述巡逻机器人的后盖存在物体。
39、一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现如上所述的巡逻机器人的后盖物体检测方法。
40、一种计算机设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如上所述的巡逻机器人的后盖物体检测方法。
41、本发明实施例通过获取巡逻机器人上的激光雷达采集到的预设时间窗口内的连续若干帧激光点云数据;对每一帧激光点云数据进行预处理,获取每一帧激光点云数据对应的有效激光点云;对所述有效激光点云进行分割,提取每一帧激光点云数据对应的后盖点云数据;分析所述后盖点云数据的变化趋势,当所述变化趋势满足预设趋势时,所述巡逻机器人的后盖存在物体;从而有效地提高了对巡逻机器人的后盖物体检测的正确率,且仅使用一个多线激光雷达,极大地降低了整体成本,便于巡逻机器人的部署和推广。
技术特征:
1.一种巡逻机器人的后盖物体检测方法,其特征在于,包括:
2.如权利要求1所述的巡逻机器人的后盖物体检测方法,其特征在于,所述对每一帧激光点云数据进行预处理,获取每一帧激光点云数据对应的有效激光点云包括:
3.如权利要求2所述的巡逻机器人的后盖物体检测方法,其特征在于,所述采用三角网格插值方法对所述激光点云数据中的缺失点进行填补包括:
4.如权利要求1所述的巡逻机器人的后盖物体检测方法,其特征在于,所述对所述有效激光点云进行分割,提取每一帧激光点云数据对应的后盖点云数据包括:
5.如权利要求4所述的巡逻机器人的后盖物体检测方法,其特征在于,所述对所述有效激光点云进行分割,提取每一帧激光点云数据对应的后盖点云数据还包括:
6.如权利要求4或5所述的巡逻机器人的后盖物体检测方法,其特征在于,所述对所述有效激光点云进行分割,提取每一帧激光点云数据对应的后盖点云数据还包括:
7.如权利要求1所述的巡逻机器人的后盖物体检测方法,其特征在于,所述分析所述后盖点云数据的变化趋势,当所述变化趋势满足预设趋势时,所述巡逻机器人的后盖存在物体包括:
8.一种巡逻机器人的后盖物体检测装置,其特征在于,所述装置包括:
9.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至7任一项所述的巡逻机器人的后盖物体检测方法。
10.一种计算机设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如权利要求1至7任一项所述的巡逻机器人的后盖物体检测方法。
技术总结
本发明公开了一种巡逻机器人的后盖物体检测方法,包括:获取巡逻机器人上的激光雷达采集到的预设时间窗口内的连续若干帧激光点云数据;对每一帧激光点云数据进行预处理,获取每一帧激光点云数据对应的有效激光点云;对所述有效激光点云进行分割,提取每一帧激光点云数据对应的后盖点云数据;分析所述后盖点云数据的变化趋势,当所述变化趋势满足预设趋势时,所述巡逻机器人的后盖存在物体。本发明提高了对巡逻机器人的后盖物体检测的正确率,且仅使用一个多线激光雷达,极大地降低了整体成本,便于巡逻机器人的部署和推广。
技术研发人员:柏林,陈亮,刘彪,舒海燕,袁添厦,祝涛剑,沈创芸,王恒华,方映峰
受保护的技术使用者:广州高新兴机器人有限公司
技术研发日:
技术公布日:2024/3/5
- 还没有人留言评论。精彩留言会获得点赞!