具有转速传感器的微机械传感器系统及用于运行其的方法与流程
本发明以具有转速传感器的微机械传感器系统为出发点。
背景技术:
1、最大程度可供激励震动质量(der seismischen masse)使用的驱动力由偏置电压和最大程度由驱动电压的驱动器所提供的电压的乘积结合驱动电压的脉冲形状而得出。
2、施加在具有转速传感器的微机械传感器系统的震动质量上(或者用来加载震动质量)的偏置电压是这样的(微机械)传感器系统的(高效)运行最重要的参数之一。一方面,相对较高(大约在5v-50v范围内)的偏置电压实现以下优点:微机械传感器系统具有高灵敏度,尤其是对于震动质量的驱动振动和探测振动的探测。另一方面,相对较高的偏置电压增加可供使用的驱动力。
3、然而,高的偏置电压也会产生高的电流消耗以及电路内部非期望的反馈效应。
4、驱动电压的驱动器的可用的高的最大电压同样增加了最大程度可供使用的驱动力,但是也引起了增加的电流消耗。
5、常规地,具有转速传感器的传统微机械传感器系统仅以特定的偏置电压来运行。在起动阶段和运行模式中最大程度可供使用的驱动电压典型地也是一致的。
6、除了提高最大偏置电压和最大程度由驱动电压的驱动器所提供的电压之外,还可以通过在驱动电极上施加方波电压而非正弦电压来额外增加驱动力。
7、在大多数情况下,将偏置电压选择为相对较高,以便通过在驱动电极上的较大的力来确保(相对较)快的起动阶段。另一个优点在于,可以相对更快地进入运行模式,并且因此可以高效地利用微机械传感器系统,尤其是使其更快地准备好使用。然而,除了这些优点之外,产生较高的电压意味着相对较高或者说更高的能量消耗。
8、在(高能效地)选择较低偏置电压的情况下,虽然可以在运行模式中通过匹配/提高机械结构/传感器系统的品质因子来保持传感器系统的驱动电压,但是由此并不能弥补进入运行模式相对较慢的缺点。
9、提高最大程度由驱动电压的驱动器所提供的电压同样会缩短起动阶段,但会导致在运行模式中更高的能量消耗。
10、为了将震动质量尽可能快地带到目标振幅,在起动阶段,以在驱动电极上的最大程度由驱动电压的驱动器所提供的电压和在中心质量上的可供使用的偏置电压来进行激励,直到达到目标振幅并且切换到驱动电压的经调节的运行。在此,在运行模式中必要的驱动电压显著低于最大程度由驱动电压的驱动器所提供的电压。
11、因此,仅在起动阶段才需要最大程度由驱动电压的驱动器所提供的电压来用于缩短起动时间。
技术实现思路
1、本发明的任务是提供一种具有转速传感器的微机械传感器系统,利用该微机械传感器系统一方面可以实现高效的、尤其是高能效的运行,另一方面仍然可以实现相对较快的直到运行模式的起动时间。
2、根据本发明的具有转速传感器的微机械传感器系统相对于现有技术具有以下优点:在起动模式和运行模式之间,通过不同地选择偏置电压的和/或最大程度由驱动电压的驱动器所提供的电压的所使用的值或水平(尤其是这些参数的不同的动态匹配的水平),可以实现:由于较高的偏置电压和/或较高的、最大程度由驱动电压的驱动器所提供的电压,尤其通过时间上相对较短且更高的能量消耗来缩短起动模式;并且,尤其通过在运行模式期间使用偏置电压和/或最大程度由驱动电压的驱动器所提供的电压的(相对于起动模式)较低的值或减小的值,在时间上相对较长的运行模式中仍然尽可能高效且因此节能地利用该微机械传感器系统或其转速传感器。因此,不同水平的偏置电压和/或最大程度由驱动电压的驱动器所提供的电压的各种优点可以分别有利地组合。
3、本发明的有利的设计方案和扩展方案能够由有利设计方案和参考附图的描述中得出。
4、根据本发明的一个有利的设计方案设置,偏置电压在起动模式中为例如20v至30v,而在运行模式中,例如为10至20v的电压被优选。有利地,因此可以设计传感器系统在运行模式中的、由于由此缩短的起动模式而引起的高能效的使用。
5、根据本发明的一个有利的设计方案设置,偏置电压凭借电荷泵来产生或能够被施加。因此,有利地,可以通过典型地能够高能效地运行的电荷泵来生成偏置电压。
6、根据本发明的一个有利的设计方案设置,最大程度由驱动电压的驱动器所提供的电压在起动模式期间通过(驱动电压的驱动器的)另一运行模式被提高到例如3v至5v,而在运行模式中,最大程度由驱动电压的驱动器所提供的电压被降低到例如1.5v至3v。
7、根据本发明的一个有利的设计方案设置,尽管降低了偏置电压和/或降低了最大程度由驱动电压的驱动器所提供的电压,但在运行模式中震动质量的振动幅度通过匹配机械结构的品质因子来保持或者说保留。该设计方案的优点在于,尤其可以实现:较低的偏置电压和/或较低的、最大程度由驱动电压的驱动器所提供的电压通过在设计中匹配机械结构的品质因子(至较高的水平)来补偿。
8、根据本发明的一个有利的设计方案设置,最大程度由驱动电压的驱动器所提供的电压和/或偏置电压逐步地(尤其是在多个步骤中)或者但是突然地(尤其是在一个步骤中)从其在起动模式期间的一个/多个值变为其在运行模式期间的一个/多个值。因此,有利地可以实现:确保时间上相对较快的从起动模式到运行模式的过渡。
9、在此,附加地,从利用最大程度由驱动电压的驱动器所提供的电压的激励切换到驱动电压的经调节的运行。
10、根据本发明的一个有利的设计方案设置,在起动模式期间使用方波电压作为驱动电压,然后在切换步骤之一中切换到正弦电压作为驱动电压。通过利用正弦电压的激励,避免了由方波激励所引起的、进行激励的驱动力的非期望的高频频谱份额。
11、根据本发明的一个有利的设计方案设置,转速传感器能够在休眠模式中运行,并且该休眠模式被实施为时间上在起动模式和运行模式之前,其中,在休眠模式和运行模式之间的时间段相当于起动模式的时间间隔,并且其中,该时间间隔包括小于100毫秒的,尤其是小于50毫秒的时间段。因此,以有利的方式可以确保相对较快的从休眠模式到运行模式的过渡。
12、本发明的另一主题是一种用于运行具有转速传感器的微机械传感器系统的方法。
13、与现有技术相比,根据本发明的用于运行具有转速传感器的微机械传感器系统的方法通过以下方式被证明为有利的:由于在两种不同模式中以不同水平的偏置电压和/或最大程度由驱动电压的驱动器所提供的电压运行具有转速传感器的微机械传感器系统的可能性,可以实现高能效的运行并且仍然相对较短的起动时间(或者说起动模式的持续时间)。尤其设置了,通过使用两种不同的(电压)水平可以高效/显著地缩短起动模式,并且仍然可以高效(高能效)地利用或者说运行微机械传感器系统或转速传感器。
14、对于用于运行具有转速传感器的微机械传感器系统的方法,可以应用以下优点和设计方案:所述优点和设计方案已结合根据本发明的微机械传感器系统或转速传感器的实施方式进行了描述。
技术特征:
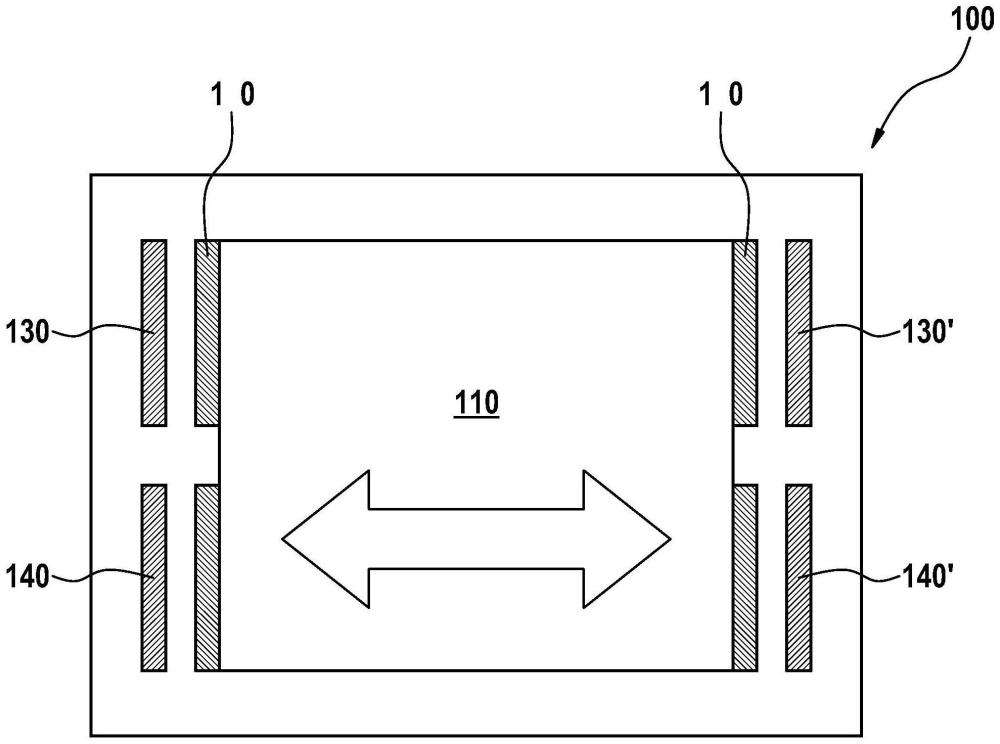
1.一种具有转速传感器的微机械传感器系统(100),所述转速传感器具有能够被激励至振动的震动质量(110)和所述震动质量(110)的驱动装置,其中,为了驱动而用偏置电压(150)和由驱动器所产生或提供的驱动电压(160)来加载所述震动质量(110),其中,借助于呈交变电压形式的所述驱动电压(160)将所述震动质量(110)激励至振动,其特征在于,所述转速传感器能够选择性地在起动模式(300)和运行模式(310)中运行,其中:
2.根据权利要求1所述的微机械传感器系统(100),其特征在于,所述偏置电压(150)在所述起动模式(300)中为20v至30v,在所述运行模式中为10v至20v,和/或,所述最大程度由驱动电压的驱动器所提供的电压(160)在所述起动模式(300)中为3v至5v,在所述运行模式(310)中为1.5至3v。
3.根据前述权利要求中任一项所述的微机械传感器系统(100),其特征在于,所述偏置电压(150)凭借电荷泵来产生或能够凭借电荷泵来施加。
4.根据前述权利要求中任一项所述的微机械传感器系统(100),其特征在于,在所述运行模式(310)中,所述震动质量(110)的驱动电压通过匹配机械结构的品质因子来保持。
5.根据前述权利要求中任一项所述的微机械传感器系统(100),其特征在于,所述最大程度由驱动电压的驱动器所提供的电压(160)和/或所述偏置电压(150)逐步地或突然地从所述起动模式变为所述运行模式,
6.根据前述权利要求中任一项所述的微机械传感器系统(100),其特征在于,所述转速传感器能够在休眠模式中运行,并且所述休眠模式被实施为时间上在所述起动模式(300)和所述运行模式(310)之前,其中,在所述休眠模式和所述运行模式(310)之间的时间段相当于所述起动模式(300)的时间间隔,其中,所述时间间隔包括小于100毫秒、尤其是小于50毫秒的时间段。
7.一种用于运行具有转速传感器的微机械传感器系统(100)的方法,所述转速传感器具有能够被激励至振动的震动质量(110)和所述震动质量(110)的驱动装置,其中,所述驱动装置被配置成,为了驱动而用偏置电压(150)和驱动电压(160)来加载所述震动质量(110),其中,借助于呈交变电压形式的所述驱动电压(160)将所述震动质量(110)激励至振动,其特征在于,所述转速传感器能够选择性地在起动模式(300)和运行模式(310)中运行,其中:
技术总结
提出一种具有转速传感器的微机械传感器系统以及一种用于运行其的方法,所述转速传感器具有能够被激励至振动的震动质量和震动质量的驱动装置,其中,为了驱动而用偏置电压和驱动电压来加载震动质量,其中,借助于呈交变电压形式的驱动电压将震动质量激励至振动,其特征在于,转速传感器能够选择性地在起动模式和运行模式中运行,其中:‑‑在起动模式中运行转速传感器时的偏置电压与在运行模式中运行转速传感器时的偏置电压不同,和/或‑‑在起动模式中运行转速传感器时最大程度由驱动电压的驱动器所提供的电压与在运行模式中运行转速传感器时最大程度由驱动电压的驱动器所提供的电压不同。
技术研发人员:F·迪亚齐,G·卡扎尼加,R·哈利柳林,T·巴尔斯林科
受保护的技术使用者:罗伯特·博世有限公司
技术研发日:
技术公布日:2024/6/11
- 还没有人留言评论。精彩留言会获得点赞!