红外通道中带消旋棱镜的光学跟踪设备的光轴标校方法与流程
本发明属于激光通信,具体涉及红外光学通道中带消旋棱镜的光学跟踪设备的光轴标校方法。
背景技术:
1、传统光学跟踪设备在实现激光光轴与红外光轴的光轴平行性标定时,只需要标定一组参数,即可实现激光光轴和红外光轴的平行性。
2、光学跟踪设备配置有激光和红外两个传感器,而红外通道带有消旋棱镜,为了实现激光的远距离测距,当消旋棱镜转动在不同角度时,必须保证红外光轴和激光光轴的平行性。而红外通道中通过旋转棱镜实现消旋功能的光学跟踪设备,旋转机械轴的角位移、棱镜轴的角位移、激光光轴的角位移,均会产生激光像跳现象。
3、随着消旋棱镜的转动,光轴标定时,空间中唯一确定的激光像点在红外通道的成像位置不尽相同,这使得带有消旋棱镜的光学跟踪设备的光轴标校变得异常复杂。
4、针对红外通道中带消旋棱镜的光学跟踪设备,传统的光轴标定方法已经失去作用。
技术实现思路
1、针对以上问题,本发明提供红外光学通道中带消旋棱镜的光学跟踪设备的光轴标校方法,根据光学跟踪设备中消旋棱镜的转动量去构建多组光轴数据,以实现自动化标定时激光光轴和红外光轴平行性的效果。
2、本发明解决其技术问题所采用的技术方案是:红外通道中带消旋棱镜的光学跟踪设备的光轴标校方法,包括以下步骤:
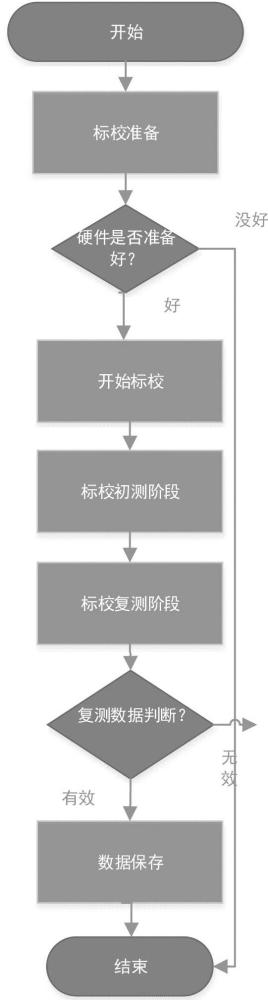
3、s1,标校准备:接收到“标校准备”命令后,将激光软开关打开,且关闭激光挡板,控制伺服控制板调转到标校位置,将开始标校命令中的计数器计数值清零,然后对外发送“标校准备好”;
4、s2,判断硬件是否准备好:当接收外部“硬件是否准备好”命令后,检查激光是否处于正常工作中,激光挡板回馈是否正常关闭,伺服控制板是否调转到标校位置,如果准备好就对外发送“硬件准备好”状态,初始化阶段时将红外传感器消旋档位setindex设置为1,控制红外传感器的消旋棱镜机构,将消旋棱镜测角值转动到3°附近,同时将程序中使用的变量清零;如果没准备好则结束标校;
5、s3,如果准备好则开始标校:接收到外部“开始标校”令后,执行红外关挡板命令,将红外传感器进行拉虚操作,避免激光将红外探测器打坏;向伺服控制板发送位置控制命令,使激光光轴、红外光轴在标校过程中空间指向保持不变;根据命令发送激光手动控制串口命令、激光能量衰减串口命令、激光频率设置成低频串口命令,最后发送激光发射串口命令;发送激光发射停止串口命令,发送红外挡板开串口命令和激光能量恢复串口命令;
6、s4,标校初测:根据红外传感器消旋档位setindex数据值,红外传感器消旋棱镜测角值转动到(setindex-1)×5+3°附近,红外传感器消旋棱镜转动4秒后,读取图像板的提取偏差数据,判断当前激光像点提取偏差量xbias、ybias的数据范围,满足xbias<25且ybias<25才进行当前档位的红外光轴标校;
7、判定数据合格后,通过以下公式获取当前档位的红外光轴数据:
8、ircrossxnow=xbias*(-1)+ircrossxlast
9、ircrossynow=ybias+ircrossylast
10、式中ircrossxnow、ircrossynow为当测红外光轴数据,ircrossxlast、ircrossylast为历史光轴数据;
11、获取到当前红外光轴数据后,立即向红外图像发送命令更新红外光轴的显示位置;按照这样的方法依次进行1到72档的红外光轴数据标校,同时保存72组红外光轴偏差初测数据和红外光轴位置初测数据;
12、s5,标校复测:根据红外传感器消旋档位setindex数据值,红外传感器消旋棱镜值测角转动到(setindex-1)×5+3°附近,红外传感器消旋棱镜转动4秒后,读取图像板的提取激光像点偏差xbias、ybias复测数据,通过以下公式获取当前档位的红外光轴数据:
13、ircrossxnow=xbias*(-1)+ircrossxlast
14、ircrossynow=ybias+ircrossylast
15、此时ircrossxnow、ircrossynow为复测红外光轴数据,ircrossxlast、ircrossylast为初测光轴数据;按照这样的方法依次进行1到72档的红外光轴数据复测;
16、s6,判断复测数据是否有效:判断获取的72组红外光轴偏差复测数据,如果72组数据中光轴复测偏差x和光轴复测偏差y同时小于3°,则认为初测标校数据有效,将标校数据进行自动保存。
17、进一步,所述的步骤s2中还包括标校数据查询命令步骤:在工作中任意时刻,都可响应外部的“标校数据查询指令”,查询保存的初测和复测两个阶段的红外光轴数据。
18、进一步,所述步骤s3中在激光发射后等待一段时间再执行标校实现,因为激光刚刚发射完毕后,打在激光相纸上的热量多,造成了激光斑点大,这时候进行标校误差将会很大。
19、再进一步,所述的步骤s4中红外传感器消旋棱镜转动4秒后,读取图像板的提取偏差数据;步骤s5中红外传感器消旋棱镜转动4秒后,读取图像板的提取激光像点偏差xbias、ybias复测数据。
20、再进一步,所述的步骤s6中如果不满足光轴自动保存的要求,则人为判断当前光轴标定数据是否保存。
21、本发明的有益效果是:本发明根据消旋棱镜的角度转动量,将红外通道中消旋棱镜的角度转动量分为72档,每5°为一个档位,然后在每个档位中进行一组光轴标定数据,这样一共有72组光轴标定数据,不再使用人工标定的方式,而是通过自动化方式标定出72组光轴数据,实现了光轴平行性的自动化标定流程,可有效解决红外通道中带消旋棱镜的光学跟踪设备红外光轴和激光光轴平行性标定异常繁琐、耗时长、精度低、可操作性差的问题。
技术特征:
1.红外通道中带消旋棱镜的光学跟踪设备的光轴标校方法,其特征在于:包括以下步骤
2.根据权利要求1所述的红外通道中带消旋棱镜的光学跟踪设备的光轴标校方法,其特征在于,所述的步骤s2中还包括标校数据查询命令步骤:任意时刻都可查询在保存的初测和复测两个阶段的红外光轴数据。
3.根据权利要求2所述的红外通道中带消旋棱镜的光学跟踪设备的光轴标校方法,其特征在于,所述步骤s3中在激光发射后等待一段时间再执行标校。
4.根据权利要求1或2或3所述的红外通道中带消旋棱镜的光学跟踪设备的光轴标校方法,其特征在于,所述的步骤s4中红外传感器消旋棱镜转动4秒后,读取图像板的提取偏差数据;步骤s5中红外传感器消旋棱镜转动4秒后,读取图像板的提取激光像点偏差xbias、ybias复测数据。
5.根据权利要求1或2或3所述的红外通道中带消旋棱镜的光学跟踪设备的光轴标校方法,其特征在于,所述的步骤s6中如果不满足光轴自动保存的要求,则人为判断当前光轴标定数据是否保存。
技术总结
本发明公开了红外通道中带消旋棱镜的光学跟踪设备的光轴标校方法,步骤依次为标校准备,判断硬件是否准备好,如果准备好则开始标校,标校初测,标校复测,判断复测数据是否有效,将标校数据进行自动保存。本发明通过将红外通道中消旋棱镜的角度转动量分为72档,每5°为一个档位,然后在每个档位中进行一组光轴标定数据,这样一共有72组光轴标定数据,且不再使用人工标定的方式,通过自动化方式标定出72组光轴数据,实现了光轴平行性的自动化标定流程。
技术研发人员:王辉,黄新华,高艳梅
受保护的技术使用者:华中光电技术研究所(中国船舶集团有限公司第七一七研究所)
技术研发日:
技术公布日:2024/3/11
- 还没有人留言评论。精彩留言会获得点赞!