基于机器视觉的球体旋转测量方法以及相关设备与流程
本申请涉及感测,尤其是涉及一种基于机器视觉的球体旋转测量方法以及相关设备。
背景技术:
1、随着越来越多的技术手段被应用于运动领域,利用先进的机器视觉等方法准确进行运动中的感测发挥了越来越重要的作用。在球类运动中,球体自身的旋转(下文将统一用旋转表示球体自身的旋转)是一个十分受到关注的参数,尤其是在球体产生高速旋转的情况下。机器视觉技术是测量球体旋转的一个重要方法。
2、现有的球体旋转测量的研究发展较久,出现了多种技术方案。一种方案利用球体的图像信息的变化进行计算,通过分析图像信息得出球体的旋转;另一种方案利用球体图像信息的相似性进行计算,通过生成摄像机在不同角度下拍摄的球体的图像信息,以比较不同时刻球体的图像信息的相似性,从而计算球体的角度变化得出球体的旋转;另一种方案通过球体的图像信息来测量球体的运动轨迹,从而计算球体的旋转。
3、现有的测量方法根据球体旋转过程的动态图像进行球体旋转值的计算。但通过动态图像信息进行球体旋转值的测量,需要球体旋转的速度在特定的转速阈值范围之内。
技术实现思路
1、有鉴于此,本申请提供了一种基于机器视觉的球体旋转测量按方法、装置、电子设备以及存储介质,以解决球体旋转值测量存在转速阈值限定的问题。
2、本申请第一方面提供了一种基于机器视觉的球体旋转测量方法,所述方法包括:
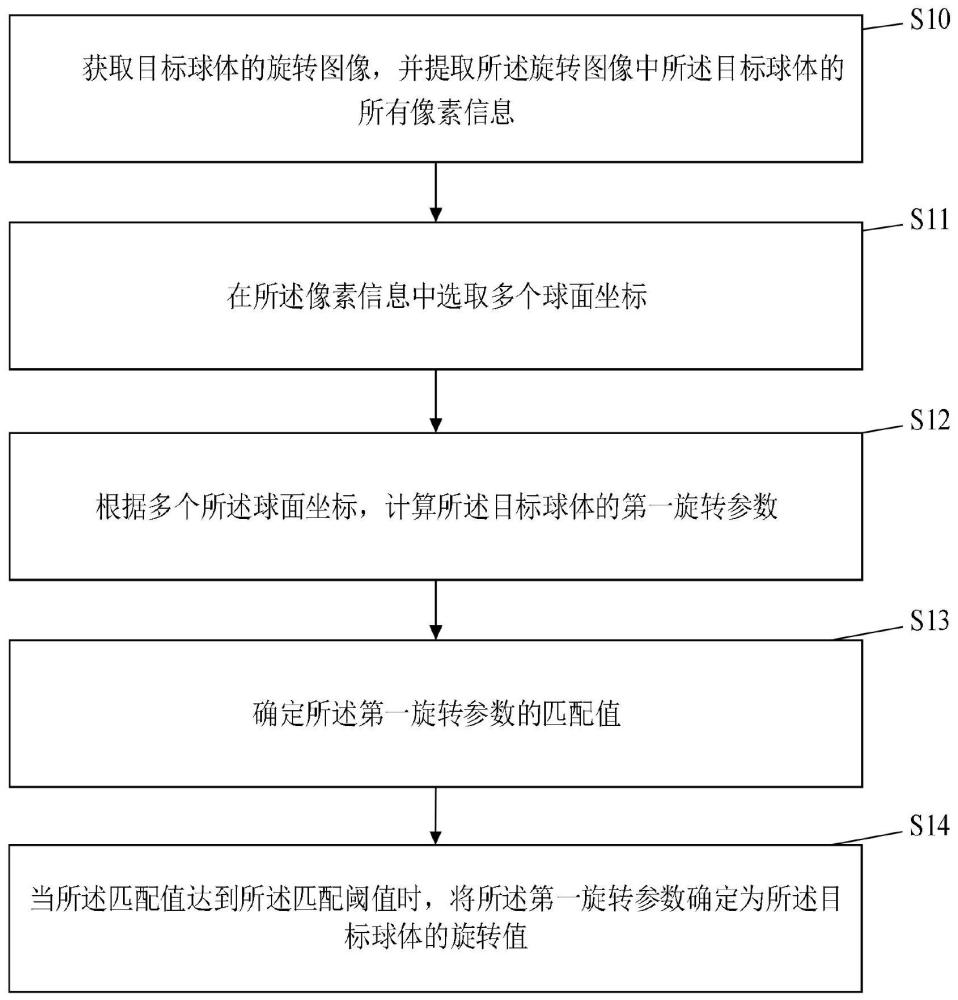
3、获取目标球体的旋转图像,并提取所述旋转图像中所述目标球体的所有像素信息;
4、在所述像素信息中选取多个球面坐标;
5、根据多个所述球面坐标,计算所述目标球体的第一旋转参数;
6、确定所述第一旋转参数的匹配值;
7、当所述匹配值达到匹配阈值时,将所述第一旋转参数确定所述目标球体的旋转值。
8、在一个可选的实施方式中,所述在所述像素信息中选取多个球面坐标包括:
9、从所述像素信息中提取出所述目标球体的多个第一像素信息;
10、对多个所述第一像素信息进行稀疏采样,以选取多个第二像素信息;
11、对多个所述第二像素信息进行随机采样,以选取多个目标像素信息;
12、将每个所述目标像素信息转换成球面坐标,以得到多个所述球面坐标。
13、在一个可选的实施方式中,所述第一旋转参数包括旋转矩阵以及旋转向量,所述根据多个所述球面坐标,计算所述目标球体的第一旋转参数包括:
14、通过如下公式计算所述第一旋转参数:
15、r=acos(p2·p1)·normalize((p1-p2)×(p3-p4));
16、r=rodrigues(r);
17、其中,p4、p3、p2以及p1为多个所述球面坐标,r为所述旋转向量,r为所述旋转矩阵,normaliza()为向量归一化函数,acos()为反余弦函数,rodrigues()为罗德里格斯公式。
18、在一个可选的实施方式中,所述确定所述第一旋转参数的匹配值包括:
19、将每个像素信息转换成为第一球面坐标并记录每个第一球面坐标的第一灰度值;
20、根据所述第一旋转参数对所述第一球面坐标进行旋转变换成第二球面坐标并记录每个第二球面坐标的第二灰度值;
21、根据所述第一灰度值以及所述第二灰度值计算所述第一旋转参数的匹配值。
22、在一个可选的实施方式中,所述根据所述第一灰度值以及所述第二灰度值计算所述第一旋转参数的匹配值,通过如下公式计算所述匹配值:
23、
24、其中,s为所述匹配值,i为所述球面坐标的序号,i(pi)为第一球面坐标pi的第一灰度值;i(p'i)为第二球面坐标p'i的第二灰度值;|()|表示计算绝对值,m为所述匹配值的计算参数。
25、在一个可选的实施方式中,当所述匹配值未达到所述匹配阈值时,所述方法还包括:记录所述多个球面坐标的采样次数;
26、比较所述采样次数与预设的采样阈值;
27、当所述采样次数达到所述采样阈值时,根据预设的报警方式进行报警;
28、当所述采样次数未达到所述采样阈值时,重新在所述像素信息中选取多个球面坐标。
29、在一个可选的实施方式中,所述提取所述旋转图像中所述目标球体的所有像素信息包括:
30、识别所述旋转图像中所述目标球体的目标区域;
31、将所述目标区域内的像素信息确定为所述目标球体的所有像素信息,并提取所述旋转图像中所述目标球体的所有像素信息。
32、本申请第二方面提供了一种基于机器视觉的球体旋转测量装置,所述装置包括:提取模块,用于获取目标球体的旋转图像,并提取所述旋转图像中所述目标球体的所有像素信息;
33、选取模块,用于在所述像素信息中选取多个球面坐标;
34、计算模块,用于根据多个所述球面坐标,计算所述目标球体的第一旋转参数;
35、确定模块,用于确定所述第一旋转参数的匹配值;
36、判断模块,用于当所述匹配值达到匹配阈值时,将所述第一旋转参数确定所述目标球体的旋转值。
37、本申请第三方面提供了一种电子设备,所述电子设备包括存储器、处理器以及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如上所述的基于机器视觉的球体旋转测量方法的步骤。
38、本申请第四方面提供了一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现如上所述的基于机器视觉的球体旋转测量方法的步骤。
39、本申请提供的一种基于机器视觉的球体旋转测量方法以及相关设备,通过获取目标球体的旋转图像,并提取图像中目标球体的像素信息,对像素信息进行采样以获取多个球面坐标,进而根据多个球面坐标进行第一旋转参数的计算。根据第一旋转参数对像素信息进行旋转变换,并根据变换前后像素信息对应的灰度值确定第一旋转参数的匹配值。通过匹配值与匹配阈值的比较验证第一旋转参数,当匹配值达到匹配阈值时,将第一旋转参数确定为目标球体的旋转值。本申请通过获取目标球体旋转过程中的某一时刻的静态图像,并根据像素分析进行旋转值的计算可以满足不同转速球体的测量需求。同时,通过验证机制确保最终获取的旋转值的准确性。
技术特征:
1.一种基于机器视觉的球体旋转测量方法,其特征在于,所述方法包括:
2.根据权利要求1所述的基于机器视觉的球体旋转测量方法,其特征在于,所述在所述像素信息中选取多个球面坐标包括:
3.根据权利要求1所述的基于机器视觉的球体旋转测量方法,其特征在于,所述第一旋转参数包括旋转矩阵以及旋转向量,所述根据多个所述球面坐标,计算所述目标球体的第一旋转参数包括:
4.根据权利要求2所述的基于机器视觉的球体旋转测量方法,其特征在于,所述确定所述第一旋转参数的匹配值包括:
5.根据权利要求4所述的基于机器视觉的球体旋转测量方法,其特征在于,所述根据所述第一灰度值以及所述第二灰度值计算所述第一旋转参数的匹配值,通过如下公式计算所述匹配值:
6.根据权利要求1所述的基于机器视觉的球体旋转测量方法,其特征在于,当所述匹配值未达到所述匹配阈值时,所述方法还包括:
7.根据权利要求1所述的基于机器视觉的球体旋转测量方法,其特征在于,所述提取所述旋转图像中所述目标球体的所有像素信息包括:
8.一种基于机器视觉的球体旋转测量装置,其特征在于,所述装置包括:
9.一种电子设备,其特征在于,所述电子设备包括存储器、处理器以及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现根据权利要求1至7中任意一项所述的基于机器视觉的球体旋转测量方法的步骤。
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现根据权利要求1至7中任意一项所述的基于机器视觉的球体旋转测量方法的步骤。
技术总结
本申请涉及感测技术领域,提供了一种基于机器视觉的球体旋转测量方法以及相关设备。通过获取目标球体的旋转图像,并提取图像中目标球体的像素信息,对像素信息进行采样以获取多个球面坐标,进而根据多个球面坐标进行第一旋转参数的计算。根据第一旋转参数对像素信息进行旋转变换,并根据变换前后像素信息对应的灰度值确定第一旋转参数的匹配值。通过匹配值与匹配阈值的比较验证第一旋转参数,当匹配值达到匹配阈值时,将第一旋转参数确定为目标球体的旋转值。本申请通过随机获取目标球体旋转过程的静态图像进行旋转值的计算和验证,从而确保旋转值的准确性以及可信性。同时,通过静态图像进行旋转分析可以适应不同转速下的球体旋转值的测量。
技术研发人员:杨海溢,王清华,王继军
受保护的技术使用者:深圳市衡泰信科技有限公司
技术研发日:
技术公布日:2024/3/21
- 还没有人留言评论。精彩留言会获得点赞!