位姿测量装置及方法与流程
本申请属于仪器仪表,具体涉及一种位姿测量装置及方法。
背景技术:
1、位姿的精密测量常见于机械加工、设备对中、精密仪器校准等领域。位敏传感器是一种成熟的光斑位置测量装置,光斑重心位置的识别精度一般在微米级,市场技术成熟,性能可靠,被广泛用于位移测量、角度测量、振动监测、轴系对中等领域。位敏传感器只能测量光斑在感光面内坐标,因此通常需要结合角度传感器、复杂的光路系统以及算法,才能用于位姿测量。目前,应用于工业领域的位姿测量装置的结构复杂,难以连续且准确地测量位姿。
技术实现思路
1、发明目的:本申请实施例提供一种位姿测量装置,旨在解决位姿测量装置的结构复杂,难以连续且准确地测量位姿的问题;本申请实施例的另一目的是提供一种位姿测量装置方法。
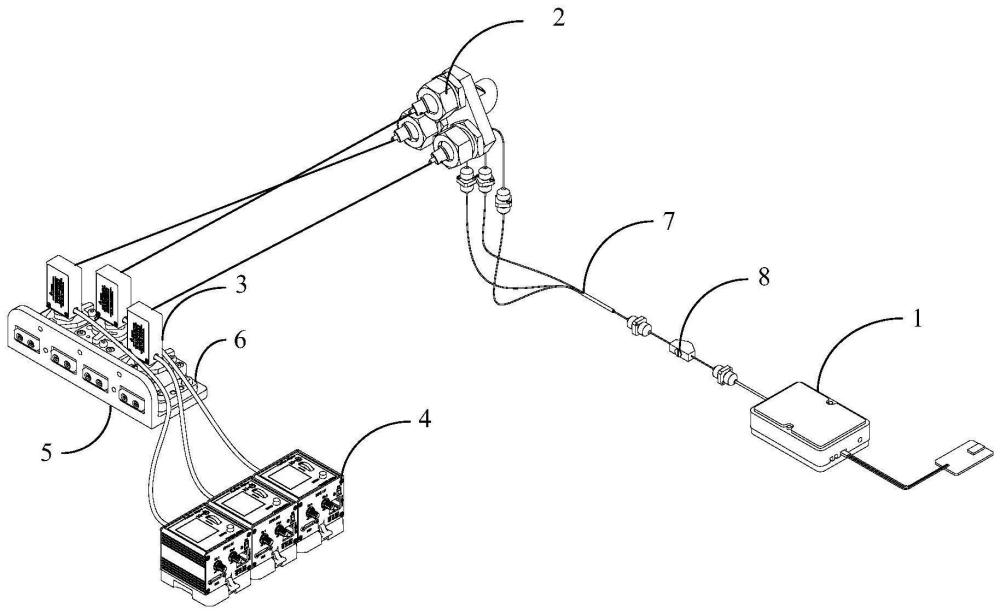
2、技术方案:本申请实施例提供一种位姿测量装置,用于测量待测设备的位姿,测量装置包括:
3、激光器,激光器用于发射第一激光;
4、准直器组件,准直器组件和激光器连接,准直器组件用于接收第一激光,以发出准直后的第二激光;
5、传感器,传感器被配置为安装于待测设备,传感器包括感光面,感光面位于传感器靠近准直器组件的一侧,以接收第二激光;感光面接收第二激光后形成有光斑;
6、数据处理模块,数据处理模块和传感器连接,数据处理模块用于处理光斑对应的坐标。
7、在一些实施例中,准直器组件包括至少三个准直器,每个准直器能够发出一束第二激光,传感器为多个且传感器数量与准直器的数量对应,多个传感器的感光面相互平行。
8、在一些实施例中,位姿测量装置包括:
9、传感器底座,传感器底座设有多个通孔,多个通孔沿第一方向和第二方向排布,第一方向和第二方向相交;
10、传感器支架,传感器与传感器支架连接,传感器支架通过多个通孔中的至少两个与传感器底座连接,传感器支架用于带动传感器沿第一方向或沿第二方向平移以测量第二激光的方向矢量。
11、在一些实施例中,传感器支架包括支架本体、转角调整部、倾角调整部和连接部,连接部与传感器连接,转角调整部朝向传感器的一侧与连接部连接,转角调整部背离传感器的一侧与倾角调整部连接,倾角调整部背离传感器的一侧与支架本体连接,转角调整部和倾角调整部用于调整传感器使得多个传感器的感光面平行。
12、在一些实施例中,准直器组件包括多个准直器和准直器支架,多个准直器与准直器支架连接;和/或
13、准直器组件包括多个准直器和多个准直器支架,准直器与准直器支架连接,准直器的数量和准直器支架的数量对应。
14、在一些实施例中,准直器支架包括导杆、转动接头和准直器支架本体,导杆的一端与准直器连接,导杆另一端与转动接头连接,转动接头背离准直器的一侧与准直器支架本体连接,转动接头用于调整准直器发射第二激光的角度。
15、相应的,本申请实施例提供一种位姿测量方法,用于测量待测设备的位姿,测量方法包括:
16、使激光器发射第一激光;
17、使准直器组件接收第一激光,以发出准直后的第二激光;
18、使传感器的感光面接收第二激光后形成光斑;
19、获取第二激光的方向矢量;
20、通过数据处理模块处理光斑在当前坐标系中的目标坐标和在预设参考坐标系中的参考坐标;
21、基于第二激光的方向矢量、参考坐标和目标坐标,完成待测设备的位姿测量。
22、在一些实施例中,通过准直器组件发出至少三组第二激光,光斑包括与第二激光分别对应的第一光斑、第二光斑和第三光斑;
23、当待测设备为初始位姿时,以第一光斑所对应的传感器为原点建立随体坐标系oxyz;
24、通过数据处理模块处理第一光斑、第二光斑和第三光斑获得对应的第一参考坐标ao、第二参考坐标bo和第三参考坐标co;
25、当待测设备位姿变化时,以第一光斑所对应的传感器的位置为原点建立随体坐标系o’x’y’z’;
26、通过数据处理模块处理第一光斑、第二光斑和第三光斑获得对应的第一目标坐标a’o’、第二目标坐标b’o’和第三目标坐标c’o’。
27、在一些实施例中,当待测设备为初始位姿时,获取第二激光的方向矢量,包括:
28、获取传感器输出的坐标值;
29、平移传感器;
30、获取平移后传感器输出的坐标值;
31、根据平移前后的传感器输出的坐标值,获得至少三组第二激光的方向矢量和
32、在一些实施例中,基于初始坐标和目标坐标,完成待测设备的位姿测量,包括:
33、建立非线性方程组:
34、
35、其中,α、β和γ分别为待测设备沿随体坐标系oxyz的x轴、y轴和z轴的旋转角度,δx,δy,δz分别为待测设备沿随体坐标系oxyz的x轴、y轴和z轴的位移量,c1、c2和c3为常数;
36、通过非线性方程组得到待测设备相对于随体坐标系oxyz的旋转角度α、β和γ及位移量δx,δy,δz。
37、在一些实施例中,基于初始坐标和目标坐标,完成待测设备的位姿测量,还包括:
38、在待测设备上选取任意点p;
39、当待测设备为初始位姿时,获取任意点p在随体坐标系oxyz的坐标po;
40、当待测设备位姿变化时,任意点p在随体坐标系oxyz的坐标为p’o,po和p’o存在如下关系:
41、pot=rx(α)ry(β)rz(γ)p′ot+[δx,δy,δz]t
42、获取基于任意点p的待测设备的位姿变化;
43、其中,po=(px,py,pz),p’o==(p’x,p’y,p’z),基于任意点p的待测设备的位姿变化表示为p′x-px,p′y-py,p′z-pz,α,β,γ。
44、有益效果:本申请实施例提供一种位姿测量装置,用于测量待测设备的位姿,包括激光器、准直器组件、传感器和数据处理模块。激光器用于发射第一激光。准直器组件和激光器连接,准直器组件用于接收第一激光,以发出准直后的第二激光。传感器被配置为安装于待测设备,传感器包括感光面,感光面位于传感器靠近准直器组件的一侧,以接收第二激光。感光面接收第二激光后形成有光斑。数据处理模块和传感器连接,数据处理模块用于处理光斑对应的坐标。如此设置,位姿测量装置的结构简单可靠,测量难度低,精度高,并且可以连续测量待测设备的位姿。
45、本申请实施例提供一种位姿测量方法,包括使激光器发射第一激光。使准直器组件接收第一激光,以发出准直后的第二激光。使传感器的感光面接收第二激光后形成光斑。获取第二激光的方向矢量。通过数据处理模块处理光斑在当前坐标系中的目标坐标和在预设参考坐标系中的参考坐标。基于第二激光的方向矢量、参考坐标和目标坐标,完成待测设备的位姿测量。该位姿测量方法的测量难度低,精度高,并且可以连续测量待测设备的位姿。
技术特征:
1.一种位姿测量装置,其特征在于,用于测量待测设备的位姿,所述测量装置包括:
2.根据权利要求1所述的位姿测量装置,其特征在于,所述准直器组件(2)包括至少三个准直器(21),每个所述准直器(21)能够发出一束所述第二激光,所述传感器(3)为多个且所述传感器(3)数量与所述准直器(21)的数量对应,多个所述传感器(3)的所述感光面(30)相互平行。
3.根据权利要求1所述的位姿测量装置,其特征在于,所述位姿测量装置包括:
4.根据权利要求3所述的位姿测量装置,其特征在于,所述传感器支架(6)包括支架本体(60)、转角调整部(61)、倾角调整部(62)和连接部(63),所述连接部(63)与所述传感器(3)连接,所述转角调整部(61)朝向所述传感器(3)的一侧与所述连接部(63)连接,所述转角调整部(61)背离所述传感器(3)的一侧与所述倾角调整部(62)连接,所述倾角调整部(62)背离所述传感器(3)的一侧与所述支架本体(60)连接,所述转角调整部(61)和所述倾角调整部(62)用于调整所述传感器(3)使得多个所述传感器(3)的所述感光面(30)平行。
5.根据权利要求1所述的位姿测量装置,其特征在于,所述准直器组件(2)包括多个准直器(21)和准直器支架(22),多个所述准直器(21)与所述准直器支架(22)连接;和/或
6.根据权利要求5所述的位姿测量装置,其特征在于,所述准直器支架(22)包括导杆(220)、转动接头(221)和准直器支架本体(60)(222),所述导杆(220)的一端与所述准直器(21)连接,所述导杆(220)另一端与所述转动接头(221)连接,所述转动接头(221)背离所述准直器(21)的一侧与所述准直器支架本体(60)(222)连接,所述转动接头(221)用于调整所述准直器(21)发射所述第二激光的角度。
7.一种位姿测量方法,其特征在于,用于测量待测设备的位姿,所述测量方法包括:
8.根据权利要求7所述的一种位姿测量方法,其特征在于,
9.根据权利要求8所述的一种位姿测量方法,其特征在于,获取所述第二激光的方向矢量,包括:
10.根据权利要求9所述的一种位姿测量方法,其特征在于,基于所述初始坐标和目标坐标,完成所述待测设备的位姿测量,包括:
11.根据权利要求10所述的一种位姿测量方法,其特征在于,基于所述初始坐标和目标坐标,完成所述待测设备的位姿测量,还包括:
技术总结
本申请公开了一种位姿测量装置及方法,用于测量待测设备的位姿,属于仪器仪表技术领域。位姿测量装置包括激光器、准直器组件、传感器和数据处理模块。激光器用于发射第一激光。准直器组件和激光器连接,准直器组件用于接收第一激光,以发出准直后的第二激光。传感器被配置为安装于待测设备,传感器包括感光面,感光面位于传感器靠近准直器组件的一侧,以接收第二激光。感光面接收第二激光后形成有光斑。数据处理模块和传感器连接,数据处理模块用于处理光斑对应的坐标。如此设置,位姿测量装置的结构简单可靠,测量难度低,精度高,并且可以连续测量待测设备的位姿。
技术研发人员:郭丰泽,杨博,陆晓玲,戎志祥,潘熙希,杨俊曼,冯熠硕
受保护的技术使用者:中国船舶集团有限公司第七一一研究所
技术研发日:
技术公布日:2024/3/24
- 还没有人留言评论。精彩留言会获得点赞!