汽车智能前照灯道路测试方法和系统与流程
本发明涉及汽车测试,尤其涉及一种汽车智能前照灯道路测试方法和系统。
背景技术:
1、汽车前照灯是关乎车辆行车安全的重要组成部件,技术的进步不仅使得汽车前照灯光源从卤素灯、氙气灯逐渐过渡到光照强度更好、寿命更长的led。同时,随着机器视觉、多模态交互传感器以及矩阵式led光源模组等前沿技术的不断成熟和应用,汽车智能前照灯,如自适应远光系统(adaptive driving beam,adb)等应运而生,以满足人们对智能驾驶照明功能的需求。
2、然而,如果车辆在行车交互过程中不能有效的识别对向车辆且成功激发自适应状态,或者存在激发速度过慢,遮蔽区域过宽等问题均会对行车安全造成非常严重的影响,使得装备了智能前照灯的车辆在行车时产生了新的安全隐患和风险。因此,有必要对车辆的智能前照灯进行合理的道路性能测试。
3、有鉴于此,特提出本发明。
技术实现思路
1、为了解决上述技术问题,本发明提供了一种汽车智能前照灯道路测试方法和系统,实现对被测车辆的智能前照灯的自适应状态激发进行识别,并准确测试和获取智能前照灯的激发时间以及遮蔽宽度的效果。
2、本发明实施例提供了一种汽车智能前照灯道路测试方法,应用于汽车智能前照灯道路测试系统的分析装置,该方法包括:
3、根据所述汽车智能前照灯道路测试系统的被测车辆相对于所述汽车智能前照灯道路测试系统的激发车辆的运动方向,确定照度接收装置;其中,所述激发车辆停放在道路的预设停放位置;所述照度接收装置为所述激发车辆上的驾驶员眼点照度传感器或者车内后视镜眼点照度传感器;
4、在所述激发车辆的灯光系统发出目标灯光的情况下,实时获取所述照度接收装置采集的光照强度,以及所述汽车智能前照灯道路测试系统的多个遮蔽宽度照度传感器采集的光照强度;其中,所述灯光系统为标准前照灯系统或标准后位灯系统;
5、根据所述照度接收装置采集的光照强度的变化情况,确定所述被测车辆上搭载的智能前照灯的激发时间,并根据多个所述遮蔽宽度照度传感器采集的光照强度的变化情况,确定所述智能前照灯的遮蔽宽度。
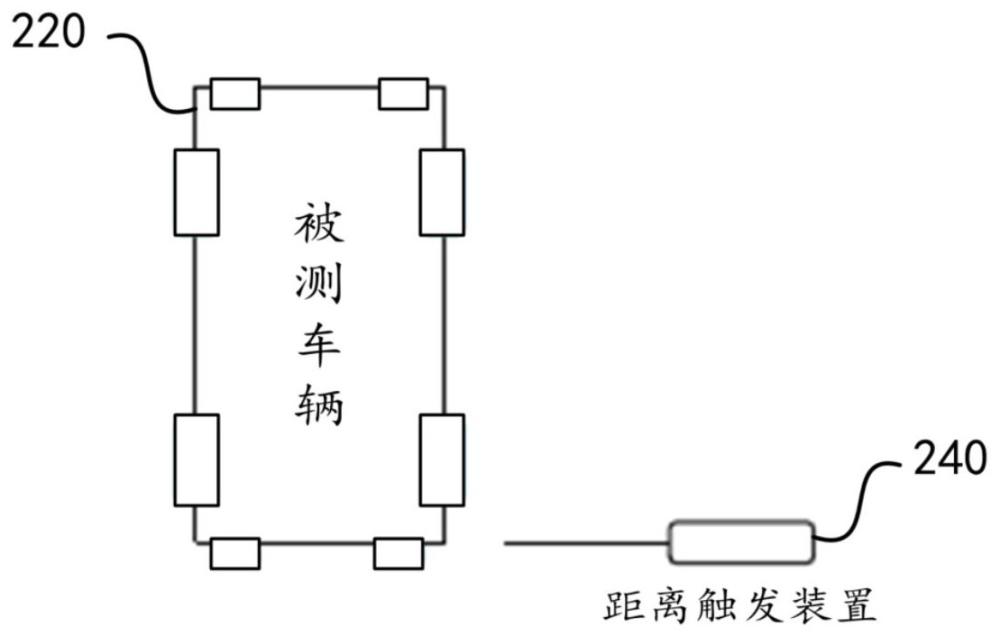
6、本发明实施例提供了一种汽车智能前照灯道路测试系统,该系统包括:激发车辆、被测车辆、5g基站、距离触发装置、多个遮蔽宽度照度传感器以及分析装置;其中,
7、所述激发车辆为改造后的m1类乘用车,停放在道路的预设停放位置,所述激发车辆上搭载标准前照灯系统、标准后位灯系统、驾驶员眼点照度传感器以及内后视镜眼点照度传感器,所述标准前照灯系统用于向所述激发车辆的前方发出前照灯光,所述向所述激发车辆的后方发出后位灯光,所述驾驶员眼点照度传感器用于获取所述激发车辆的前方的光照强度,所述内后视镜眼点照度传感器用于获取所述激发车辆的后方的光照强度;
8、所述被测车辆上搭载智能前照灯,所述智能前照灯用于接收所述激发车辆发出的前照灯光或后位灯光时,调节智能前照灯的亮度;
9、所述距离触发装置,设置在与所述激发车辆距离在目标距离的位置处,用于在检测到所述被测车辆以目标速度行驶至所述距离触发装置的位置时,向所述5g基站发出触发信号,以通过所述5g基站将所述触发信号转发给激发车辆,激发车辆在接收到所述触发信号时,发出所述前照灯光或者后位灯光;
10、所述5g基站,与所述距离触发装置和所述激发车辆分别通信连接,用于接收所述距离触发装置发出的触发信号,并将所述触发信号转发至所述激发车辆;
11、多个所述遮蔽宽度照度传感器,设置在所述道路上,并按照预设距离依次设置在所述激发车辆两侧,用于实时接收各预设位置处的光照强度;
12、所述分析装置,用于执行任一实施例所述的汽车智能前照灯道路测试方法。
13、本发明实施例具有以下技术效果:
14、通过根据汽车智能前照灯道路测试系统的被测车辆相对于汽车智能前照灯道路测试系统的激发车辆的运动方向,确定照度接收装置,以便于通过照度接收装置判断被测车辆上搭载的智能前照灯是否被激发,以及激发情况下的激发时间和遮蔽宽度,进而,在激发车辆的灯光系统发出目标灯光的情况下,实时获取照度接收装置采集的光照强度,以及汽车智能前照灯道路测试系统的多个遮蔽宽度照度传感器采集的光照强度,根据照度接收装置采集的光照强度的变化情况,确定被测车辆上搭载的智能前照灯的激发时间,并根据多个遮蔽宽度照度传感器采集的光照强度的变化情况,确定智能前照灯的遮蔽宽度,实现了通过道路测试对被测车辆的智能前照灯的自适应状态激发进行识别,并准确测试和获取智能前照灯的激发时间以及遮蔽宽度的效果。
技术特征:
1.一种汽车智能前照灯道路测试方法,其特征在于,应用于汽车智能前照灯道路测试系统的分析装置,包括:
2.根据权利要求1所述的方法,其特征在于,所述根据所述汽车智能前照灯道路测试系统的被测车辆相对于所述汽车智能前照灯道路测试系统的激发车辆的运动方向,确定照度接收装置,包括:
3.根据权利要求1所述的方法,其特征在于,所述根据所述照度接收装置采集的光照强度的变化情况,确定所述被测车辆上搭载的智能前照灯的激发时间,包括:
4.根据权利要求1所述的方法,其特征在于,所述根据多个所述遮蔽宽度照度传感器采集的光照强度的变化情况,确定所述智能前照灯的遮蔽宽度,包括:
5.一种汽车智能前照灯道路测试系统,其特征在于,包括:激发车辆、被测车辆、5g基站、距离触发装置、多个遮蔽宽度照度传感器以及分析装置;其中,
6.根据权利要求5所述的系统,其特征在于,所述驾驶员眼点照度传感器,包括第一照度探头以及第一探头固定装置;所述内后视镜眼点照度传感器包括第二照度探头以及第二探头固定装置;其中,
7.根据权利要求6所述的系统,其特征在于,所述第一预设姿态为朝向所述激发车辆的车头方向且与所述激发车辆的纵向中心线平行,所述第一预设姿态根据所述激发车辆的驾驶位置确定;所述第二预设姿态为朝向所述激发车辆的车尾方向且与所述激发车辆的纵向中心线平行,所述第二预设姿态为所述激发车辆的内后视镜的几何中心。
8.根据权利要求5所述的系统,其特征在于,所述标准前照灯系统包括第一卤素灯和第二卤素灯,所述第一卤素灯和所述第二卤素灯与地面的距离均为750mm,所述第一卤素灯和所述第二卤素灯的光学中心间距为1500mm,所述第一卤素灯和所述第二卤素灯的出光口径面积为80cm2,所述第一卤素灯和所述第二卤素灯发出的前照灯光的光照强度小于前照灯标准照度上限的80%。
9.根据权利要求5所述的系统,其特征在于,所述标准后位灯系统包括第一白炽灯和第二白炽灯,所述第一白炽灯和所述第二白炽灯与地面的距离均为750mm,所述第一白炽灯和所述第二白炽灯的光学中心间距为1500mm,所述第一白炽灯和所述第二白炽灯的出光口径面积为50cm2,所述第一白炽灯和所述第二白炽灯均在大于±25°的圆锥角范围内发出后位灯光,所述后位灯光的光照前度小于7cd,且大于后位灯标准照度下限。
10.根据权利要求5所述的系统,其特征在于,所述5g基站,包括:采集信号传输装置,路由器、无线网络发生装置、信号放大器;其中,
技术总结
本发明涉及车辆测试领域,公开了一种汽车智能前照灯道路测试方法和系统,该方法包括:根据汽车智能前照灯道路测试系统的被测车辆相对于汽车智能前照灯道路测试系统的激发车辆的运动方向,确定照度接收装置;在激发车辆的灯光系统发出目标灯光的情况下,实时获取照度接收装置采集的光照强度和汽车智能前照灯道路测试系统的多个遮蔽宽度照度传感器采集的光照强度;根据照度接收装置采集的光照强度的变化情况,确定被测车辆上搭载的智能前照灯的激发时间,并根据多个遮蔽宽度照度传感器采集的光照强度的变化情况,确定智能前照灯的遮蔽宽度。本发明对智能前照灯的自适应状态激发进行识别,并准确测试和获取智能前照灯的激发时间和遮蔽宽度。
技术研发人员:赵准,栗晋杰,赵斌,赵帅,邹博维,杜天强,陈澎,姜国凯,毕腾飞,张世琦,宁洋,董帅,张起朋,姬馨玉,田喆,王诗萌
受保护的技术使用者:中汽研汽车检验中心(天津)有限公司
技术研发日:
技术公布日:2024/1/22
- 还没有人留言评论。精彩留言会获得点赞!