一种巡检机器人导航状态判定方法与流程
本发明属于机器人,特别涉及一种巡检机器人导航状态判定方法。
背景技术:
1、对于自主巡检机器人而言,能够准确判定当前导航定位的状态很重要。业内通常使用的判定方法为基于当前传感器数据和地图数据的匹配程度,数值化为百分比表示的置信度。当置信度低于一定百分比的时候就认为机器人定位丢失,反之置信度较高的时候认为定位正常。
2、现有导航定位状态判定方法方便快捷,在定位计算的同时就能直接获取,但是容易导致误判。置信度降低是因为当前传感器数据和地图匹配程度下降,而造成该问题的原因可能有多种,其中当前定位位置和实际位置不匹配(定位丢失)只是其中一种。还有可能是当前位置环境相比建图时发生改变以及传感器数据出现异常等原因导致机器人实际定位准确,而置信度较低的情况。
技术实现思路
1、发明目的:针对现有技术中存在的问题,本发明提供一种巡检机器人导航状态判定方法,通过对传感器数据的一系列预处理操作,有效适应环境的变动,不会由于行人等动态物体以及临时停放的车辆等非永久物体导致置信度下降。
2、技术方案:为解决上述技术问题,本发明提供一种巡检机器人导航状态判定方法,包括如下步骤:
3、步骤1、基于slam算法构建巡检场地的三维点云地图;
4、步骤2、根据需要巡检的设备或目标,设置巡检路径;
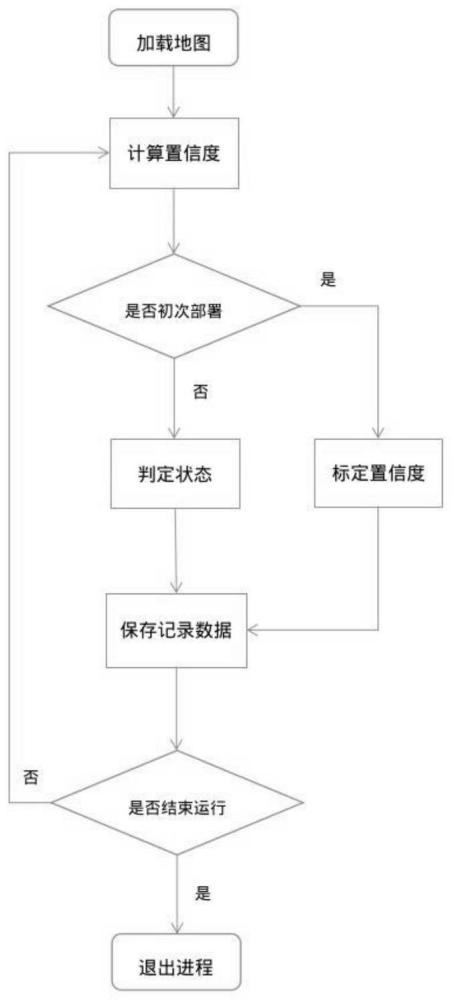
5、步骤3、遍历所有巡检路径,标定参考置信度;
6、步骤4、进行巡检任务,实时判定导航状态。
7、进一步的,所述步骤3中遍历所有巡检路径,标定参考置信度的具体步骤如下:
8、步骤3.1、基于定位算法线程获取机器人实时位置坐标;
9、步骤3.2、创建置信度计算线程;
10、步骤3.3、进入置信度校准模式后,机器人自动遍历通过所有的预设路径,每间隔1米记录一次定位坐标及置信度,作为置信度标定点保存于指定文件或数据库中。
11、进一步的,所述步骤3.2中创建置信度计算线程的具体步骤如下:
12、步骤3.2.1、将传感器数据转化为pcl点云数据,基于传感器安装高度及点云法线方向将地面点提取出来;
13、步骤3.2.2、使用pcl将去除地面点之后的传感器点云进行聚类,获取每个聚类点云的bounding box,存入追踪队列;
14、步骤3.2.3、和追踪队列中保存的前几帧点云数据的bounding box进行位置对比,区分动态点云和静态点云;
15、步骤3.2.4、对静态的聚类点云进行类型识别,剔除非永久物体点云;
16、步骤3.2.5、根据该帧的定位坐标将剩余的永久物体点云按照每个聚类单独与地图点云进行基于voxel gicp的点云配准,得到每个聚类点云的匹配程度,并数值化为百分比表示的置信度;
17、步骤3.2.6、对所有聚类点云的置信度根据各点云包含点的数量加权计算均值,对置信度方差过大的点云过滤或者降权处理,得到最终的总体置信度。
18、进一步的,所述步骤4中进行巡检任务,实时判定导航状态的具体步骤如下:
19、步骤4.1、加载置信度标定文件或数据库;
20、步骤4.2、基于定位算法线程与步骤3.2中置信度计算线程获取机器人实时位置坐标与置信度;
21、步骤4.3、根据置信度判定导航状态;
22、步骤4.4、记录导航状态保存到历史数据用以展示与分析。
23、进一步的,所述步骤4.3中根据置信度判定导航状态的具体步骤如下:
24、通过定位坐标查找最近到标定点坐标,对比当前置信度和最近标定点置信度的差值;如果当前置信度高于标定值或低于标定值不超过10%为正常置信度,当前置信度低于标定值10%到30%之间为置信度预警,低于标定值超过30%为置信度异常;机器人初始为定位正常状态,当机器人在定位正常状态下出现连续5帧置信度预警,判定进入定位预警状态,此时机器人会降低运行速度,加大定位配准范围;当机器人在正常状态下连续2帧的置信度预警或异常后再出现1帧置信度异常,或机器人预警状态下出现1帧置信度异常,判定进入定位丢失状态,此时机器人停止运动,进行全局重定位尝试恢复定位状态;机器人于定位预警状态或定位丢失状态下出现连续10帧的置信度处于正常比例判定为定位恢复正常,进入定位正常状态,此时机器人恢复默认运行速度进行当前任务。
25、进一步的,所述步骤4.4中记录导航状态保存到历史数据用以展示与分析的具体步骤如下:机器人在运行过程中将实时的定位置信度数值及偏差记录到运行数据库中,同时页面展示的实时置信度以及历史记录中的置信度/时间曲线会根据正常,预警,异常状态分别以绿色,黄色,红色显示。
26、与现有技术相比,本发明的优点在于:
27、本发明通过对传感器数据的一系列预处理操作,可以有效适应环境的变动,不会由于行人等动态物体以及临时停放的车辆等非永久物体导致置信度下降。同时对置信度的判定采用了全局动态的对比判定,相比固定阈值判定能够自适应不同场景以及场景不同区域。综合以上优化,本方法相比现有方法对导航状态判定更为精确,误判概率更低。
28、本发明将物体分为三种类型,运动物体、静态非永久物体、永久参照物。通过增加的三个对配准点云处理步骤进行区分过滤,通过相邻帧聚类点云bounding box的位置变化可以过滤掉运动物体,通过点云类型识别可以过滤例如静止站立的行人,临停的车辆等常见类型的非永久静态物体,而通过聚类后对每个物体点云单独取匹配度后通过方差可以过滤掉类型识别中未检测出来的非常见类型的非永久静态物体,因为位置偏移会导致所有物体匹配度都降低,而单个物体位置变动仅该物体匹配度降低,这两种情况方差分布会有所不同。通过这样三个步骤的过滤处理,相比现有方法可以更有效的区分永久参照物和动态变化物体,保证导航状态判定的准确性。
技术特征:
1.一种巡检机器人导航状态判定方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的一种巡检机器人导航状态判定方法,其特征在于,所述步骤3中遍历所有巡检路径,标定参考置信度的具体步骤如下:
3.根据权利要求2所述的一种巡检机器人导航状态判定方法,其特征在于,所述步骤3.2中创建置信度计算线程的具体步骤如下:
4.根据权利要求2所述的一种巡检机器人导航状态判定方法,其特征在于,所述步骤4中进行巡检任务,实时判定导航状态的具体步骤如下:
5.根据权利要求4所述的一种巡检机器人导航状态判定方法,其特征在于,所述步骤4.3中根据置信度判定导航状态的具体步骤如下:
6.根据权利要求4所述的一种巡检机器人导航状态判定方法,其特征在于,所述步骤4.4中记录导航状态保存到历史数据用以展示与分析的具体步骤如下:机器人在运行过程中将实时的定位置信度数值及偏差记录到运行数据库中,同时页面展示的实时置信度以及历史记录中的置信度/时间曲线会根据正常,预警,异常状态分别以绿色,黄色,红色显示。
技术总结
本发明公开了一种巡检机器人导航状态判定方法,步骤包括:(1)基于slam算法构建巡检场地的三维点云地图;(2)根据需要巡检的设备或目标,设置巡检路径;(3)遍历所有巡检路径,标定参考置信度;(4)进行巡检任务,实时判定导航状态。本发明通过对传感器数据的一系列预处理操作,有效适应环境的变动,不会由于行人等动态物体以及临时停放的车辆等非永久物体导致置信度下降。
技术研发人员:白小山,刘爽,闵济海
受保护的技术使用者:南京天创电子技术有限公司
技术研发日:
技术公布日:2024/5/29
- 还没有人留言评论。精彩留言会获得点赞!