自动打光优化设备及方法与流程
本发明属于自动化检测,尤其涉及一种自动打光优化设备及方法。
背景技术:
1、在产品升级与技术快速迭代的趋势下,机器视觉检测设备开始应用在自动化检测领域,应用这些技术的自动化检测产品占据越来越多的市场份额,但目前的自动化机器视觉检测设备仍存在许多不足。在机器视觉领域中,用光源模块进行打光操作,并确定光源、相机等视觉部件的参数,是十分重要的环节,但传统的零件打光操作依靠人工完成,其技术门槛高、耗时长、人工成本高、主观影响因素大,已严重影响产品质量。提供一个低成本、可靠、可自动优化的零件打光方法及设备是业内亟待解决的技术问题。
技术实现思路
1、本发明的目的在于提供一种自动打光优化设备及方法,旨在解决现有技术中的传统的零件打光操作依靠人工完成,其技术门槛高、耗时长、人工成本高、主观影响因素大,已严重影响产品质量的技术问题。
2、为实现上述目的,本发明实施例提供的一种自动打光优化设备,包括图像采集单元和图像处理单元,图像处理单元与图像采集单元连接,图像处理单元用于处理图像采集单元所采集的图像。其特征在于:图像采集单元包括相机模块、光源模块和平台模块。平台模块用于装载工件,且用于驱动工件移动。相机模块的摄像端朝向平台模块所装置工件的一面,用于拍摄位于平台模块上的工件,且相机模块与图像处理单元连接,用于向图像处理单元传输相片。图像处理单元包括定位模块、尺寸测量模块、读码模块和缺陷检测模块。定位模块用于定位图像中的物体位置,尺寸测量模块用于测量图像中的物体的尺寸,读码模块用于读取图像中二维码或条形码信息,缺陷检测模块检测物体缺陷,对定位模块、尺寸测量模块和读码模块的输出进行综合评估得出最优打光方案,根据最优打光方案调整相机模块、光源模块和平台模块。
3、进一步,光源模块包括两发光模块和光源控制器,光源控制器控制两发光模块的工作状态。发光模块包括外壳和设置在外壳内的全光谱八区环形光源、全色域同轴光源、全色域全圆光源、全色域条形光源、全色域圆顶光源和全色域线扫光源组成。平台模块设置在两发光模块之间。
4、进一步,全色域同轴光源、全色域全圆光源、全色域条形光源、全色域圆顶光源和全色域线扫光源各波段在可见光波段范围,其色温包括红、橙、黄、绿、蓝、靛、紫和白,各光源亮度、各光照角度和发光区域可通过软件进行调节。
5、进一步,全光谱八区环形光源波段在全光谱范围,其色温包括红、橙、黄、绿、蓝、靛、紫、白、紫外光和红外光,其亮度、各光照角度和发光区域可通过软件进行调节。
6、进一步,光源控制器用于控制全光谱八区环形光源、全色域同轴光源、全色域全圆光源、全色域条形光源、全色域圆顶光源和全色域线扫光源的亮光时长和频率。
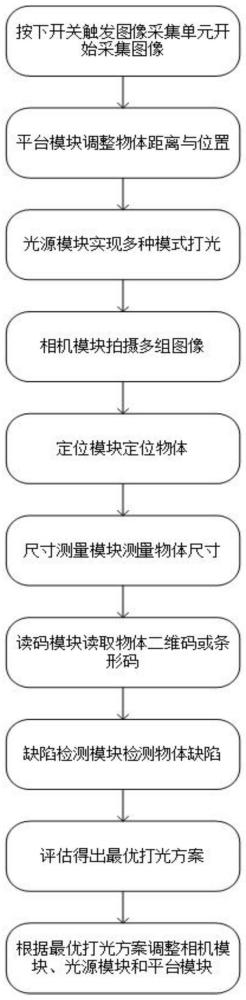
7、本发明提供的一种自动打光优化方法,采用自动打光优化设备,包括以下步骤:步骤一、工作人员开启图像采集单元,平台模块自动调整物体的距离与位置,光源模块自动实现若干种打光模式,相机模块自动拍摄若干组图像,将拍摄到的各图像传输至图像处理单元。步骤二、图像处理单元接收图像并记录拍摄图像时的物体位置、光源参数与相机参数,根据用户指定的视觉任务,通过定位模块定位图像中的物体位置,通过尺寸测量模块测量物体的实际尺寸,通过读码模块读取图像中二维码和条形码信息,通过缺陷检测模块检测物体缺陷。步骤三、根据步骤二所检测结果,进行综合评估得出最优打光方案,评估的法则是根据相应的损失函数的最小值决定,损失函数为l(y,f(x))=(y-f(x))2,其中l(y,f(x))表示损失值,y表示真实值,f(x)表示预测值,根据最优打光方案向用户输出相机模块、光源模块与平台模块的具体参数,供用户最终使用。
8、进一步,定位模块通过形状匹配定位算法定位图像中的物体位置,根据真实位置,结合损失函数计算图像中的物体位置与定位评价标准的损失,得出损失值。
9、进一步,尺寸测量模块根据参照物尺寸和所占像素计算物品的尺寸,根据损失函数计算物品的尺寸与尺寸评价标准的损失,得出损失值。
10、进一步,读码模块通过连通块定位算法定位码的位置,再通过解码算法解读条形码或二维码信息,根据损失函数计算条形码或二维码信息与读码评价标准的损失,得出损失值。
11、进一步,缺陷检测模块通过缺陷检测算法检测出物体的缺陷位置与类型,根据损失函数计算物体的缺陷位置与类型与缺陷评价标准的损失,得出损失值。
12、本发明实施例提供的自动打光优化设备及方法中的上述一个或多个技术方案至少具有如下技术效果之一:通过相机模块、光源模块和平台模块,获取多组物体打光图像,其经过图像处理单元的定位模块、尺寸测量模块、读码模块与缺陷检测模块综合评估打光效果,根据综合评估得出最优打光方案,根据最优打光方案调整相机模块、光源模块与平台模块来优化打光效果。
技术特征:
1.一种自动打光优化设备,包括图像采集单元和图像处理单元,所述图像处理单元与所述图像采集单元连接,所述图像处理单元用于处理所述图像采集单元所采集的图像;其特征在于:所述图像采集单元包括相机模块、光源模块和平台模块;所述平台模块用于装载工件,且用于驱动工件移动;所述相机模块的摄像端朝向所述平台模块所装置工件的一面,用于拍摄位于所述平台模块上的工件,且所述相机模块与所述图像处理单元连接,用于向所述图像处理单元传输相片;所述图像处理单元包括定位模块、尺寸测量模块、读码模块和缺陷检测模块;所述定位模块用于定位图像中的物体位置,所述尺寸测量模块用于测量图像中的物体的尺寸,所述读码模块用于读取图像中二维码或条形码信息,所述缺陷检测模块检测物体缺陷,对所述定位模块、所述尺寸测量模块和所述读码模块的输出进行综合评估得出最优打光方案,根据最优打光方案调整所述相机模块、所述光源模块和所述平台模块。
2.根据权利要求1所述的自动打光优化设备,其特征在于:所述光源模块包括两发光模块和光源控制器,所述光源控制器控制两所述发光模块的工作状态;所述发光模块包括外壳和设置在所述外壳内的全光谱八区环形光源、全色域同轴光源、全色域全圆光源、全色域条形光源、全色域圆顶光源和全色域线扫光源组成;所述平台模块设置在两所述发光模块之间。
3.根据权利要求2所述的自动打光优化设备,其特征在于:所述全色域同轴光源、所述全色域全圆光源、所述全色域条形光源、所述全色域圆顶光源和所述全色域线扫光源各波段在可见光波段范围,其色温包括红、橙、黄、绿、蓝、靛、紫和白,各光源亮度、各光照角度和发光区域可通过软件进行调节。
4.根据权利要求2所述的自动打光优化设备,其特征在于:所述全光谱八区环形光源波段在全光谱范围,其色温包括红、橙、黄、绿、蓝、靛、紫、白、紫外光和红外光,其亮度、各光照角度和发光区域可通过软件进行调节。
5.根据权利要求2所述的自动打光优化设备,其特征在于:所述光源控制器用于控制所述全光谱八区环形光源、所述全色域同轴光源、所述全色域全圆光源、所述全色域条形光源、所述全色域圆顶光源和所述全色域线扫光源的亮光时长和频率。
6.一种自动打光优化方法,采用权利要求1~5任一项所述的自动打光优化设备,其特征在于:包括以下步骤:步骤一、工作人员开启所述图像采集单元,所述平台模块自动调整物体的距离与位置,所述光源模块自动实现若干种打光模式,所述相机模块自动拍摄若干组图像,将拍摄到的各图像传输至所述图像处理单元;步骤二、所述图像处理单元接收图像并记录拍摄图像时的物体位置、光源参数与相机参数,根据用户指定的视觉任务,通过所述定位模块定位图像中的物体位置,通过所述尺寸测量模块测量物体的实际尺寸,通过所述读码模块读取图像中二维码和条形码信息,通过所述缺陷检测模块检测物体缺陷;步骤三、根据步骤二所检测结果,进行综合评估得出最优打光方案,评估的法则是根据相应的损失函数的最小值决定,损失函数为l(y,f(x))=(y-f(x))2,其中l(y,f(x))表示损失值,y表示真实值,f(x)表示预测值,根据最优打光方案向用户输出所述相机模块、所述光源模块与所述平台模块的具体参数,供用户最终使用。
7.根据权利要求6所述的自动打光优化方法,其特征在于:所述定位模块通过形状匹配定位算法定位图像中的物体位置,根据真实位置,结合损失函数计算图像中的物体位置与定位评价标准的损失,得出损失值。
8.根据权利要求6所述的自动打光优化方法,其特征在于:所述尺寸测量模块根据参照物尺寸和所占像素计算物品的尺寸,根据损失函数计算物品的尺寸与尺寸评价标准的损失,得出损失值。
9.根据权利要求6所述的自动打光优化方法,其特征在于:所述读码模块通过连通块定位算法定位码的位置,再通过解码算法解读条形码或二维码信息,根据损失函数计算条形码或二维码信息与读码评价标准的损失,得出损失值。
10.根据权利要求6所述的自动打光优化方法,其特征在于:缺陷检测模块通过缺陷检测算法检测出物体的缺陷位置与类型,根据损失函数计算物体的缺陷位置与类型与缺陷评价标准的损失,得出损失值。
技术总结
本发明属于自动化检测技术领域,尤其涉及一种自动打光优化设备及方法,通过工业相机、载物平台与多个光源,获取多组物体打光图像,其经过图像处理单元的定位模块、尺寸测量模块、读码模块与缺陷检测模块根据客户指定的具体任务,自动调整相机模块、光源模块与平台模块来优化打光效果,基于智能算法综合评估打光效果,根据综合评估得出最优打光方案,将最终的方案输出供用户在具体的视觉任务中使用。
技术研发人员:曾一龙
受保护的技术使用者:四维传感技术(深圳)有限公司
技术研发日:
技术公布日:2024/3/17
- 还没有人留言评论。精彩留言会获得点赞!