一种软体机器鱼的测速方法及软体机器鱼
本发明涉及水下机器人,特别是涉及一种软体机器鱼的测速方法及软体机器鱼。
背景技术:
1、近年来,随着海洋技术的不断发展,越来越多的水下探测仪器涌现出来,其中包括了自动水下航行器(autonomous underwater vehicles,auv)、遥控无人潜水器(remoteoperated vehicle,rov)、无人水下航行器(uncrewed underwater vehicles,uuv)等水下航行器。
2、相比于传统的刚性水下探测装备,软体机器人在复杂、极端环境下展现出的灵活性和可塑性使其在海洋探索中发挥了重要的作用。其中,受生物鱼类启发研究的软体机器鱼是软体水下机器人的主要仿生形式。
3、目前已有的软体机器鱼测速方法包括视频测速和加速度计积分测速。其中视频测速需要对机器鱼的游动过程持续录制一段视频,通过关键帧提取并求得平均速度。加速度计测速需要将收集到的加速度值进行积分获得一段时间内的速度。但视频测速依赖于高清视频的录制,在复杂环境和深海等可见光非常低的情况下很难实现,而加速度计积分测速则会有累计误差产生,因此软体机器鱼的测速准确率较低,在不能获取准确速度的情况下,难以对软体机器鱼进行精准控制。
技术实现思路
1、本发明的目的在于提供一种软体机器鱼的测速方法及软体机器鱼,能够解决提高软体机器鱼测速准确率的问题。
2、为实现上述目的,本发明采用以下技术方案:
3、提供一种软体机器鱼的测速方法,包括以下步骤:
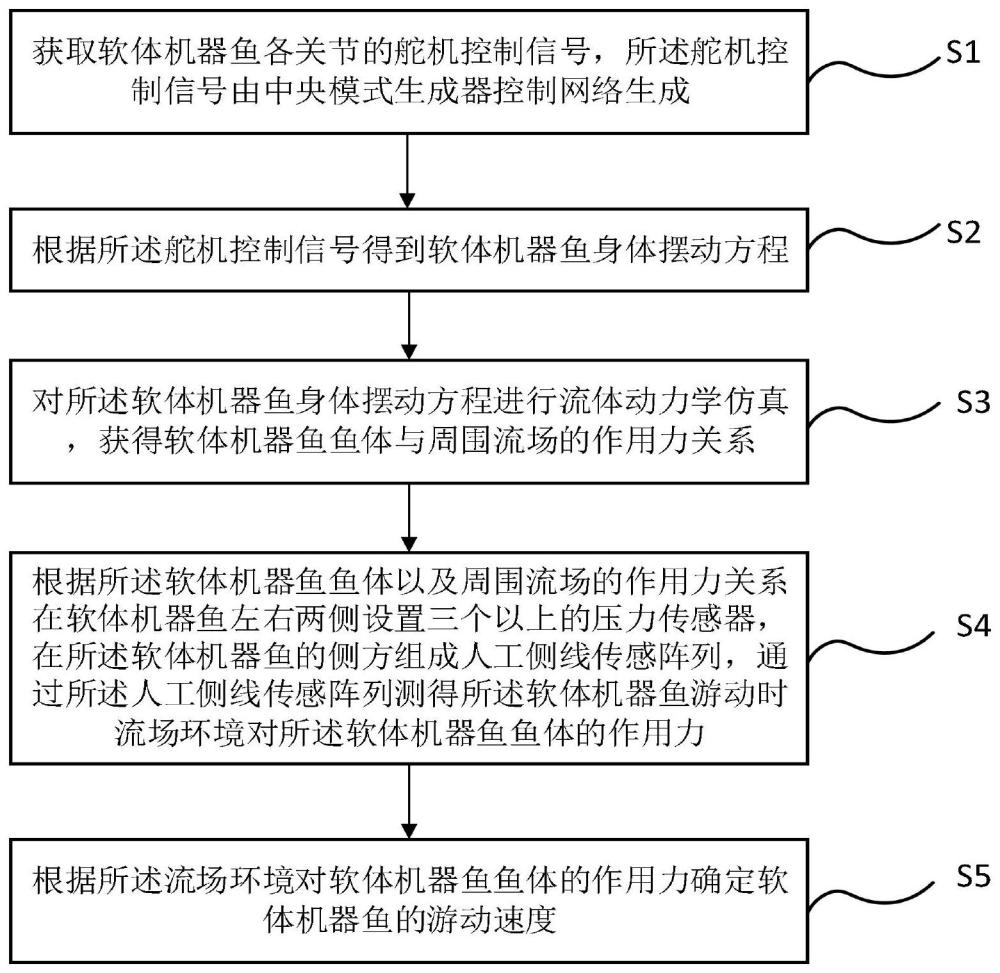
4、s1、获取软体机器鱼各关节的舵机控制信号,所述舵机控制信号由中央模式生成器控制网络生成;
5、s2、根据所述舵机控制信号得到软体机器鱼身体摆动方程;
6、s3、对所述软体机器鱼身体摆动方程进行流体动力学仿真,获得软体机器鱼鱼体与周围流场的作用力关系;
7、s4、根据所述软体机器鱼鱼体以及周围流场的作用力关系在软体机器鱼左右两侧设置三个以上的压力传感器,在所述软体机器鱼的侧方组成人工侧线传感阵列,通过所述人工侧线传感阵列测得所述软体机器鱼游动时流场环境对所述软体机器鱼鱼体的作用力;
8、s5、根据所述流场环境对软体机器鱼鱼体的作用力确定软体机器鱼的游动速度。
9、在本发明的一些实施例中,所述软体机器鱼外部由硅胶倒模封装,内部由串行舵机和骨架组成,所述舵机的输出轴与下一关节通过3d打印的关节连接,通过驱动舵机带动鱼体摆动产生推进力。
10、在本发明的一些实施例中,步骤s2中,所述软体机器鱼身体摆动方程如下:
11、
12、其中,i和j代表神经元的序号,xi,yi分别代表第i个神经元当前的兴奋和抑制状态,分别代表第i个神经元下一时刻的兴奋和抑制状态,ωi代表第i个神经元的振荡频率,gi表示第i个振荡单元的最大振荡幅值;决定振荡器的收敛速度;是最近耦合的两个振荡器相位差,αi是最近耦合振荡器相位差的耦合系数;p(fk)表示对不同传感信号fk的归一化和平滑化函数。
13、在本发明的一些实施例中,所述第i个神经元的振荡频率ωi由以下方程表示:
14、
15、所述对不同传感信号fk的归一化和平滑化函数p(fk)由以下方程表示:
16、
17、其中,ωr和ωd分别为常数,提供游动升力时采用快速振荡速率ωr,减小游动阻力时采用缓慢振荡速率ωd,决定振荡器的收敛速度,η用于区分两种不同速度振荡频率ωr和ωd的占比,σk是各压力传感器的反馈信号,sgn是符号函数,限定传感反馈信号的阈值。
18、在本发明的一些实施例中,步骤s2中,所述软体机器鱼身体摆动方程由cpg方程产生的数据点拟合得到各关节运动方程,再将各关节运动方程通过分段函数拟合直至收敛得到。
19、在本发明的一些实施例中,步骤s3具体为:根据所述软体机器鱼身体摆动方程编写udf导入fluent软件,在所述fluent软件中对所述软体机器鱼身体摆动方程进行cfd仿真,获得鱼体以及周围流场的作用力关系和受力曲线。
20、在本发明的一些实施例中,步骤s4中所述压力传感器由聚乙烯吡咯烷酮和碳纳米管混合制作碳纳米管墨水,导入3d打印好的微流道模型,采用定向液体扩散方法在微流道中形成平面外压电阻器,并用二甲基硅油封装制成。
21、在本发明的一些实施例中,步骤s5具体为:将所述人工侧线传感阵列测得的所述软体机器鱼游动时流场环境对所述软体机器鱼鱼体的作用力代入拉格朗日水动力分析方程得到所述软体机器鱼的游动速度,所述拉格朗日水动力分析方程如下:
22、
23、式中,ek为系统的动能,ep为系统的势能,θi为广义坐标,qi为广义力。
24、在本发明的一些实施例中,取3个身体关节的相对角位移为拉格朗日水动力分析方程的广义坐标,取关节驱动力矩ti和传压力感器测得的流体与鱼体的相互作用力fi为拉格朗日水动力分析方程的广义力。
25、本发明还提供一种软体机器鱼,包括处理器以及存储器,所述存储器存储有计算机可读取指令,当所述计算机可读取指令由所述处理器执行时,运行上述方法中的步骤。
26、本发明具有如下有益效果:
27、本发明通过中央模式生成器控制网络生成的舵机控制信号得到软体机器鱼身体摆动方程,并对软体机器鱼身体摆动方程进行流体动力学仿真,获得软体机器鱼体以及周围流场的作用力关系的设置,能够紧密联系中央模式生成器控制网络的舵机控制信号和流体动力学仿真,实现算法改进到流体仿真的结合;通过流体动力学仿真获得软体机器鱼游动时的作用力关系,在软体机器鱼侧方设置压力传感器,形成阵列分布的人工侧线,模拟鱼类的身体侧线对周围流场进行感知,能够准确测量周围流场的变化,从而准确获取软体机器鱼的游动速度。
28、在一些实施例中有以下有益效果:
29、本发明的压力传感器由聚乙烯吡咯烷酮和碳纳米管混合制作碳纳米管墨水,导入3d打印好的微流道模型,采用定向液体扩散方法在微流道中形成平面外压电阻器,并用二甲基硅油封装制成,压力传感器在软体机器鱼身体左右两侧形成人工侧线阵列,相比传统的刚性传感器,本发明的柔性的压力传感器,能够使鱼身摆动时保持贴合稳定,更加灵活和轻便,可以感受到两个方面的剪切力,提高了机器鱼的仿生性和环境感知能力。
30、本发明实施例中的其他有益效果将在下文中进一步述及。
技术特征:
1.一种软体机器鱼的测速方法,其特征在于,包括以下步骤:
2.如权利要求1所述的软体机器鱼的测速方法,其特征在于,所述软体机器鱼外部由硅胶倒模封装,内部由串行舵机和骨架组成,所述舵机的输出轴与下一关节通过3d打印的关节连接,通过驱动舵机带动鱼体摆动产生推进力。
3.如权利要求1所述的软体机器鱼的测速方法,其特征在于,步骤s2中,所述软体机器鱼身体摆动方程如下:
4.如权利要求2所述的软体机器鱼的测速方法,其特征在于,所述第i个神经元的振荡频率ωi由以下方程表示:
5.如权利要求1所述的软体机器鱼的测速方法,其特征在于,步骤s2中,所述软体机器鱼身体摆动方程由cpg方程产生的数据点拟合得到各关节运动方程,再将各关节运动方程通过分段函数拟合直至收敛得到。
6.如权利要求1所述的软体机器鱼的测速方法,其特征在于,步骤s3具体为:根据所述软体机器鱼身体摆动方程编写udf导入fluent软件,在所述fluent软件中对所述软体机器鱼身体摆动方程进行cfd仿真,获得鱼体以及周围流场的作用力关系和受力曲线。
7.如权利要求1所述的软体机器鱼的测速方法,其特征在于,步骤s4中所述压力传感器由聚乙烯吡咯烷酮和碳纳米管混合制作碳纳米管墨水,导入3d打印好的微流道模型,采用定向液体扩散方法在微流道中形成平面外压电阻器,并用二甲基硅油封装制成。
8.如权利要求1所述的软体机器鱼的测速方法,其特征在于,步骤s5具体为:将所述人工侧线传感阵列测得的所述软体机器鱼游动时流场环境对所述软体机器鱼鱼体的作用力代入拉格朗日水动力分析方程得到所述软体机器鱼的游动速度,所述拉格朗日水动力分析方程如下:
9.如权利要求8所述的软体机器鱼的测速方法,其特征在于,取3个身体关节的相对角位移为拉格朗日水动力分析方程的广义坐标,取关节驱动力矩ti和压力传感器测得的流体与鱼体的相互作用力fi为拉格朗日水动力分析方程的广义力。
10.一种软体机器鱼,包括处理器以及存储器,所述存储器存储有计算机可读取指令,当所述计算机可读取指令由所述处理器执行时,运行如权利要求1-9任一项所述的方法中的步骤。
技术总结
本发明提出一种软体机器鱼的测速方法及软体机器鱼,其中软体机器鱼的测速方法包括以下步骤:获取软体机器鱼各关节的舵机控制信号,舵机控制信号由中央模式生成器控制网络生成;根据舵机控制信号得到软体机器鱼身体摆动方程;对软体机器鱼身体摆动方程进行流体动力学仿真,获得软体机器鱼鱼体与周围流场的作用力关系;根据软体机器鱼鱼体以及周围流场的作用力关系在软体机器鱼左右两侧设置三个以上的压力传感器,在软体机器鱼的侧方组成人工侧线传感阵列,通过人工侧线传感阵列测得软体机器鱼游动时流场环境对软体机器鱼鱼体的作用力;根据流场环境对软体机器鱼鱼体的作用力确定软体机器鱼的游动速度,从而提高软体机器鱼测速准确率。
技术研发人员:曲钧天,王云飞
受保护的技术使用者:清华大学深圳国际研究生院
技术研发日:
技术公布日:2024/3/21
- 还没有人留言评论。精彩留言会获得点赞!