一种基于霍夫变换的传递对准方法与流程
本发明属于惯性导航系统,具体涉及一种基于霍夫变换的传递对准方法,尤其是测量安装角度和延迟时间的惯性导航系统传递对准方法。
背景技术:
1、车辆、舰船、飞机等载体具有主惯性导航系统。主惯性导航系统持续工作,为车辆、舰船、飞机等提供导航信息。导弹、鱼雷等设备具有子惯性导航系统。子惯性导航系统平时不工作,在需要时工作。当子惯性导航系统开始工作时,需要利用主惯性导航系统获得初始的姿态、速度、位置等信息。子惯性导航系统利用主惯性导航系统进行对准,这一过程称为传递对准。
2、受限于结构精度、安装精度等因素,子惯性导航系统和主惯性导航系统的轴向不完全一致,存在安装角度偏差。此外,电子系统的传输需要消耗时间,主惯性导航系统的信息向子惯性导航系统传输时存在延迟时间。在传递对准中,需要取得安装角度和延迟时间。
3、现有技术中,专利号201310227454.8《一种基于速度加比力匹配的传递对准延迟时间估计方法》,以及专利号201510457943.1《一种基于速度加姿态匹配的传递对准延迟时间估计与补偿方法》,方法是使用卡尔曼滤波器估计安装角度和延迟时间。卡尔曼滤波器需要建立导航系统的数学模型,比较复杂。对于不同的导航系统,需要建立不同的数学模型才能运用该方法。上述现有方法通用性不佳。
技术实现思路
1、(一)要解决的技术问题
2、本发明要解决的技术问题是:改善传递对准方法的通用性,提供便捷适用于各类惯性导航系统的传递对准方法。
3、(二)技术方案
4、为了解决上述技术问题,本发明提供一种基于霍夫变换的传递对准方法,所述方法包含以下步骤:
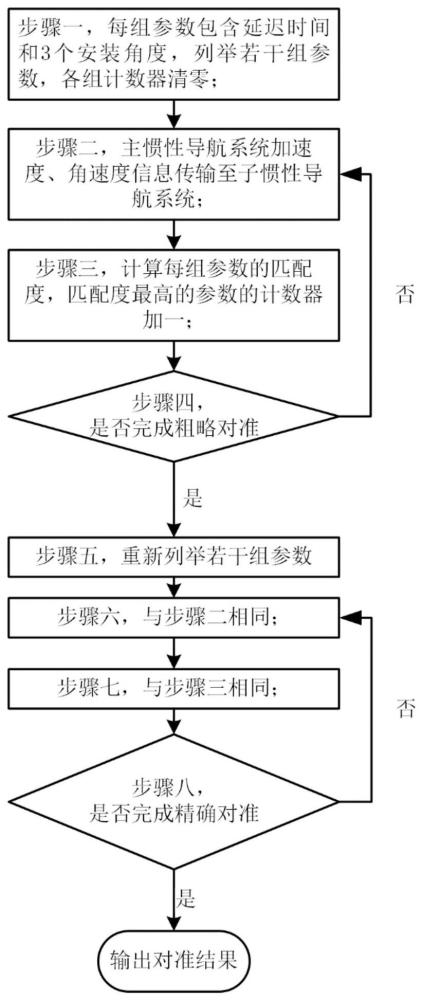
5、步骤一,每个参数组包含延迟时间和3个安装角度,列举若干参数组,各组计数清零;
6、步骤二,主惯性导航系统加速度、角速度信息传输至子惯性导航系统;
7、步骤三,计算每个参数组的匹配度,匹配度较高的参数组的计数增加;
8、步骤四,判断是否完成粗略对准,是则继续步骤五,否则转到步骤二;
9、步骤五,在粗略对准得到的参数附近,重新列举若干参数组,每个参数组包含延迟时间和3个安装角度,各组计数清零;
10、步骤六,与步骤二相同;
11、步骤七,与步骤三相同;
12、步骤八,判断是否完成精确对准,是则输出对准结果,否则转到步骤六。
13、其中,所述步骤四,判断是否完成粗略对准的方法是:查找计数最大值和次大值,如果最大值大于预设第一阈值,且最大值与次大值的差超过预设第二阈值,则判定完成粗略对准。
14、其中,步骤八,判断是否完成精确对准的方法是:查找计数最大值和次大值,如果最大值大于预设第三阈值,且最大值与次大值的差超过预设第四阈值,则判定完成精确对准。
15、其中,所述步骤一,每个参数组包含延迟时间和3个安装角度,安装角度每1度划分一组。
16、其中,所述步骤五,每个参数组包含延迟时间和3个安装角度,安装角度每0.02度划分一组。
17、其中,所述步骤一,每个参数组包含延迟时间和3个安装角度,延迟时间每10毫秒划分一组。
18、其中,所述步骤五,每个参数组包含延迟时间和3个安装角度,延迟时间每2毫秒划分一组。
19、其中,所述步骤三,计算每个参数组的匹配度,匹配度计算方法为:计算姿态变换后的主惯性导航系统加速度、补偿延时后的子惯性导航系统加速度,计算向量内积并除以二者模长。
20、其中,所述步骤三,计算每个参数组的匹配度,匹配度计算方法为:计算姿态变换后的主惯性导航系统角速度、补偿延时后的子惯性导航系统角速度,计算向量内积并除以二者模长。
21、其中,所述步骤三,匹配度较高的参数的计数增加,具体为:所有参数组按照匹配度排序,排序位于前20%的参数组的计数增加。
22、(三)有益效果
23、与现有技术相比较,本发明有益效果:本发明不需要专门建立惯性导航系统的数学模型,可以通用地测量各类惯性导航系统安装角度和延迟时间,实现传递对准。
技术特征:
1.一种基于霍夫变换的传递对准方法,其特征在于,所述方法包含以下步骤:
2.权利要求1所述的基于霍夫变换的传递对准方法,其特征在于,所述步骤四,判断是否完成粗略对准的方法是:查找计数最大值和次大值,如果最大值大于预设第一阈值,且最大值与次大值的差超过预设第二阈值,则判定完成粗略对准。
3.权利要求2所述的基于霍夫变换的传递对准方法,其特征在于,步骤八,判断是否完成精确对准的方法是:查找计数最大值和次大值,如果最大值大于预设第三阈值,且最大值与次大值的差超过预设第四阈值,则判定完成精确对准。
4.权利要求1所述的基于霍夫变换的传递对准方法,其特征在于,所述步骤一,每个参数组包含延迟时间和3个安装角度,安装角度每1度划分一组。
5.权利要求1所述的基于霍夫变换的传递对准方法,其特征在于,所述步骤五,每个参数组包含延迟时间和3个安装角度,安装角度每0.02度划分一组。
6.权利要求1所述的基于霍夫变换的传递对准方法,其特征在于,所述步骤一,每个参数组包含延迟时间和3个安装角度,延迟时间每10毫秒划分一组。
7.权利要求1所述的基于霍夫变换的传递对准方法,其特征在于,所述步骤五,每个参数组包含延迟时间和3个安装角度,延迟时间每2毫秒划分一组。
8.权利要求1所述的基于霍夫变换的传递对准方法,其特征在于,所述步骤三,计算每个参数组的匹配度,匹配度计算方法为:计算姿态变换后的主惯性导航系统加速度、补偿延时后的子惯性导航系统加速度,计算向量内积并除以二者模长。
9.权利要求1所述的基于霍夫变换的传递对准方法,其特征在于,所述步骤三,计算每个参数组的匹配度,匹配度计算方法为:计算姿态变换后的主惯性导航系统角速度、补偿延时后的子惯性导航系统角速度,计算向量内积并除以二者模长。
10.权利要求1所述的基于霍夫变换的传递对准方法,其特征在于,所述步骤三,匹配度较高的参数的计数增加,具体为:所有参数组按照匹配度排序,排序位于前20%的参数组的计数增加。
技术总结
本发明属于惯性导航系统技术领域,具体涉及一种基于霍夫变换的传递对准方法,包括以下步骤:列举若干参数组,传输加速度、角速度读信息,计算匹配度,判断是否完成粗略对准,重新列举参数组,传输加速度、角速度读信息,计算匹配度,判断是否完成精确对准。本发明不需要专门建立惯性导航系统的数学模型,可以通用地测量各类惯性导航系统安装角度和延迟时间、实现传递对准,突出优点是具有较好的通用性。
技术研发人员:刘天一,樊振辉,周易成,孙铭垚,苏帅琪
受保护的技术使用者:西安现代控制技术研究所
技术研发日:
技术公布日:2024/3/31
- 还没有人留言评论。精彩留言会获得点赞!