一种半球谐振陀螺高精度解调方法与流程
本发明属于惯性测量,具体涉及半球谐振陀螺解调技术。
背景技术:
1、在现代化战争中,要求新一代武器装备具备精确打击、快速反应、强抗干扰能力。陀螺仪器是惯性导航系统的核心器件,是提高武器系统的战场应变能力、生存能力和协同作战等能力的关键技术。
2、速率积分半球谐振陀螺是利用半球谐振子振动驻波沿环向的进动来敏感基座角运动的固体波动陀螺。其采用谐振子和平板电极“两件套”结构,具备高精度的同时,结构更加简单,更适合低成本大批量生产,可直接测量载体转动角度,且谐振子的驻波进动系数仅由谐振子结构决定,标度因数稳定性极好,具备高精度、抗辐照、低功耗、小体积、高可靠性、寿命长且全寿命免维护的独特优点,可满足新一代武器装备发展需求。
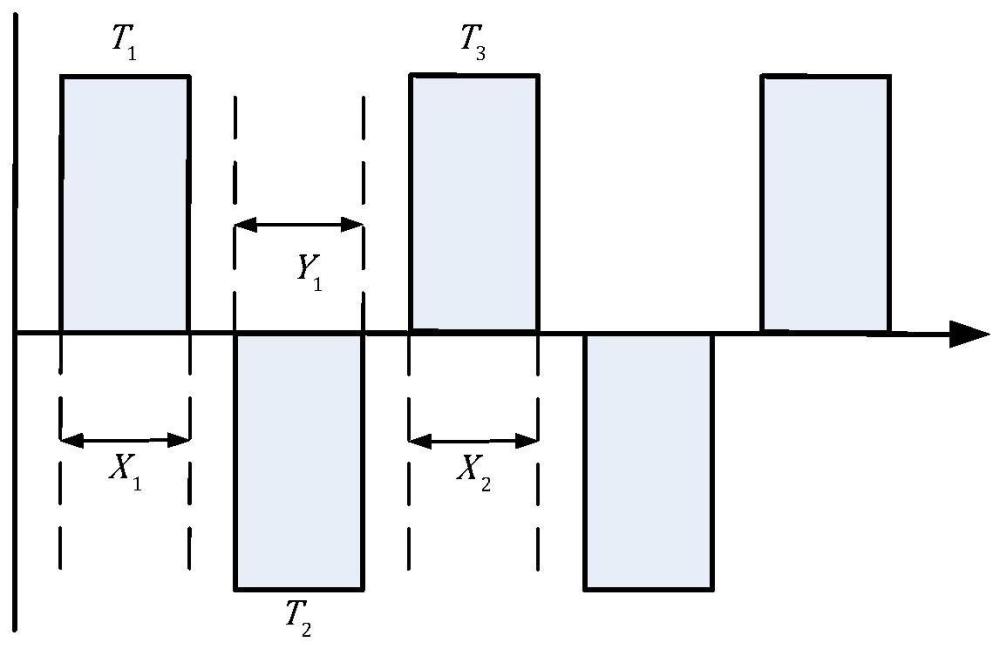
3、半球谐振陀螺是通过敏感谐振子唇沿与平板电极间的电容变化实现陀螺振动信号提取。为了达到简化陀螺结构、抑制通道不对称误差、提高电极利用率等目的,通常采用电极分时复用模式,即电极分别在四个时段通过x/y电极对陀螺进行驱动或采样。由于x/y电极的采样不在同一时刻,x/y电极的采样信号存在驻波方位角误差,采用传统的解调方法会引入解调误差,并通过控制回路引入控制误差。
技术实现思路
1、针对x/y电极分时采样信息不在同一时刻,x/y电极采样信号存在驻波方位角误差,采用传统解调方法会引入解调误差的问题,本发明目的在于提供一种半球谐振陀螺高精度解调方法。
2、为实现本发明目的,本发明采取技术方案如下:
3、一种半球谐振陀螺高精度解调方法,对半球谐振陀螺x/y通道分时采样信号误差特性进行解调算法设计,抑制x/y通道采样信息不同步引入的解算误差。
4、进一步的,将x路信号前一时刻解调的控制参数与x路信号当前时刻解调的控制参数求平均作为最近一次y路采样时刻的x路信号解调的控制参数。
5、与现有技术对比,本发明有益效果如下:
6、本发明针对半球谐振陀螺电极分时采样条件下x/y通道采样信号误差特性进行解调算法设计,抑制x/y通道采样信息不同步引入的解算误差,该算法原理简单且易于实现,既可以满足半球谐振陀螺信号高精度解调需求,又能提高半球谐振陀螺控制精度。
技术特征:
1.一种半球谐振陀螺高精度解调方法,其特征在于,对半球谐振陀螺x/y通道分时采样信号误差特性进行解调算法设计,抑制x/y通道采样信息不同步引入的解算误差。
2.根据权利要求1所述的一种半球谐振陀螺高精度解调方法,其特征在于,将x路信号前一时刻解调的控制参数与x路信号当前时刻解调的控制参数求平均作为最近一次y路采样时刻的x路信号解调的控制参数。
3.根据权利要求1所述的一种半球谐振陀螺高精度解调方法,其特征在于,
技术总结
本发明公开了一种半球谐振陀螺高精度解调方法,对半球谐振陀螺X/Y通道分时采样信号误差特性进行解调算法设计,抑制X/Y通道采样信息不同步引入的解算误差。本发明原理简单且易于实现,既满足半球谐振陀螺信号高精度解调需求,又能提高半球谐振陀螺控制精度。
技术研发人员:徐海刚,牛畅,钟润伍,梁文伟,邱丽玲,杜善宇,杨丽,孙凯丽
受保护的技术使用者:北京自动化控制设备研究所
技术研发日:
技术公布日:2024/3/17
- 还没有人留言评论。精彩留言会获得点赞!