一种主动光学感应系统及激光雷达的制作方法
本发明涉及光学成像系统领域,具体涉及一种主动光学成像与感应系统。
背景技术:
1、现代汽车工业、互联网产业的发展对目标物体的信息获取精确度和识别速度要求越来越高。现有的目标物物理识别的方法主要包括光学成像、激光雷达(lsdar)和电磁波雷达等,这些设备一次只能获取目标物信息的图像或形状信息,获得不同的信息就需要多个设备同时同步工作,这会占用大量安装空间,并且使得安装难度成倍提升;要想将这些信息运用还需要复杂的主动光学感应系统和运算,增加了显示延迟,而且最终呈现的画面准确度不高;并且由于设计问题,这些设备对工作环境的抗干扰要求非常高,进一步加大了安装难度。
技术实现思路
1、本发明提供一种主动光学感应系统,其特征在于,包括:
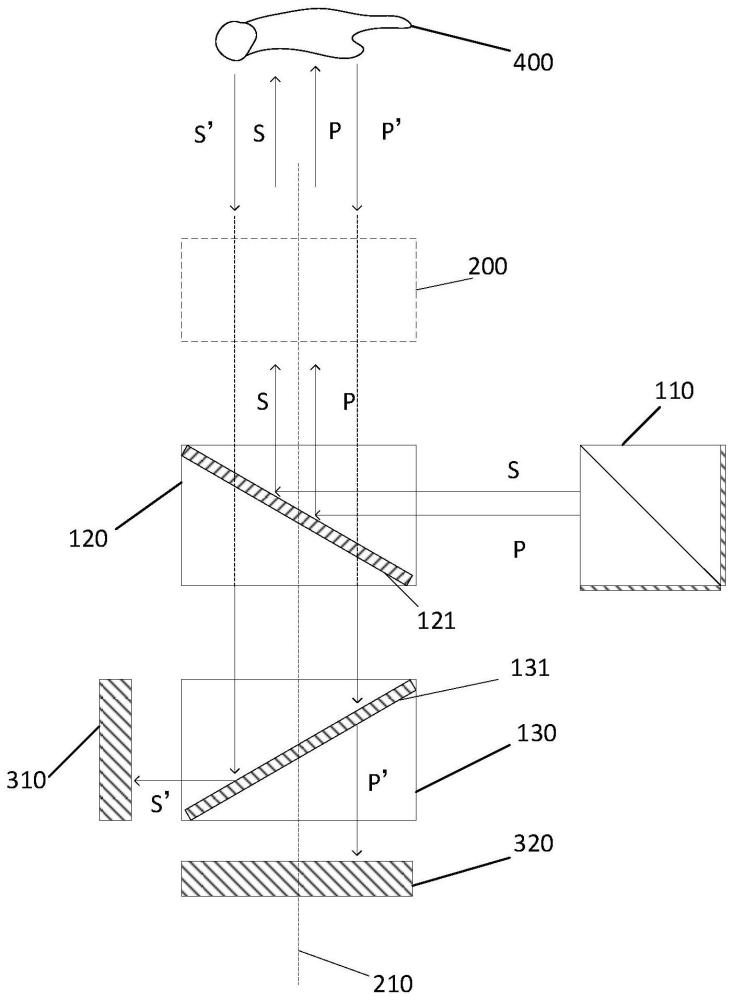
2、照射光源模块,用于提供相互平行的p照射光和s照射光,所述p照射光和s照射光分别由多束相互平行的p极化光束和s极化光束组成;
3、第一分光模块,用于将照射光源模块所提供的p照射光和s照射光偏转,沿第一光轴向光学透镜组的方向射出,使得p照射光和s照射光同时、同步投射到目标物的同一区域;
4、光学透镜组,以第一光轴为光学轴线,由可调节扩束镜组成;
5、第二分光模块,用于将由p照射光照射目标物所产生的p反射光p’、由s照射光照射目标物所产生的s反射光s’,分别偏转至两个不同方向的光学感应器上;
6、所述两个不同方向的光学感应器中一个光学感应器生成目标物体的物形,另一个光学感应器生成带有与目标物距离的物像信号。
7、可选的,还包括第一1/4波片和第二1/4波片,所述第一1/4波片设在透镜组与第一分光模块之间,所述第二1/4波片设在第一分光模块与第二分光模块之间。
8、可选的,所述两个不同方向的光学感应器中,一个为飞行时间探测感应器,另一个为时间积分灰度成像感应器。
9、可选的,所述p和s照射光的光源为同一或接近波长的激光。
10、可选的,所述透镜组还包括聚焦透镜与凹透镜。
11、可选的,其特征在于,第一分光模块包含tir分光片。
12、可选的,第二分光模块包含pbs(极化光光束分离)分光片。
13、可选的,所述的物形或外形信号和图形或图像信号融合成为目标物体同一区域的复合图像。
14、可选的,所述光源模块出射波长为850~940um近红外光或光源模块出射波长为1150~1550um短波红外光。
15、本发明还提供一种激光雷达,其特征在于,包括上述的主动光学感应系统。
16、本发明通过一个主动光学感应系统实现了对目标物的同一区域同时同步感应获取“图像”和“图形”信息,减少了使用的设备;并能点对点实现同时同步帧“融合”,在避开复杂的主动光学感应系统合成运算的同时减少了显示延迟,提高了最终呈现画面及时性;使用了偏振光进行信息采集,大大提升了主动光学感应系统的抗干扰能力,并且经由偏振光采集到的图像会去除目标物上可能存在的眩光,从而巧妙解决了因眩光导致画面不清晰的问题;采用p偏振光与s偏振光同时进行采集,最大程度地在保证画面清晰度的情况下提高了画面的准确度。
技术特征:
1.一种主动光学感应系统,其特征在于,包括:
2.根据权利要求1所述的主动光学感应系统,其特征在于,还包括第一1/4波片和第二1/4波片,所述第一1/4波片设在透镜组与第一分光模块之间,所述第二1/4波片设在第一分光模块与第二分光模块之间。
3.根据权利要求1或2所述的主动光学感应系统,其特征在于,所述两个方向不同的光学感应器中,一个为飞行时间探测感应器,另一个为时间积分灰度成像感应器。
4.根据权利要求3所述的主动光学感应系统,其特征在于,所述p和s照射光的光源为同一或接近波长的激光。
5.根据权利要求4所述的主动光学感应系统,其特征在于,所述透镜组还包括聚焦透镜与凹透镜。
6.根据权利要求5中所述的主动光学感应系统,其特征在于,第一分光模块包含tir分光片。
7.根据权利要求6所述的主动光学感应系统,其特征在于,第二分光模块包含pbs(极化光光束分离)分光片。
8.根据权利要求7所述的主动光学感应系统,其特征在于,所述的物形或外形信号和图形或图像信号融合成为目标物体同一区域的复合图像。
9.根据权利要求8所述的主动光学感应系统,其特征在于,所述光源模块出射波长为850~940um近红外光或出射波长为1150~~1550um短波红外光。
10.一种激光雷达,其特征在于,包括如上述权利要求1至9中任一项所述的主动光学感应系统。
技术总结
本发明公开了一种主动光学感应系统及激光雷达,包括:照射光源模块,用于提供相互平行的P照射光和S照射光;第一分光模块,用于将照射光源模块所提供的P照射光和S照射光偏转,沿第一光轴向光学透镜组的方向射出,使得P照射光和S照射光同时、同步投射到目标物的同一区域;光学透镜组,以第一光轴为光学轴线,由可调节扩束镜组成;第二分光模块,用于将由P照射光照射目标物所产生的P反射光P’、由S照射光照射目标物所产生的S反射光S’,分别偏转至两个不同方向的光学感应器上;本发明通过一个主动光学感应系统实现了对目标物的同一区域同时同步感应获取“图像”和“图形”信息。
技术研发人员:黄河
受保护的技术使用者:深圳瑞纳电子技术发展有限公司
技术研发日:
技术公布日:2024/3/21
- 还没有人留言评论。精彩留言会获得点赞!