一种车辆自动错距方法、装置、系统及一种车载电脑与流程
本发明属于车辆路径规划,尤其涉及一种车辆自动错距方法、装置、系统及一种车载电脑。
背景技术:
1、车辆自动驾驶技术目前广泛应用于工程施工,具有施工规范、行驶路线精准、机械利用率高、对人体损伤小等优点。
2、在车辆自动化碾压施工场景中,例如对于堤坝的碾压,车辆需要在一个区域内往复移动碾压路面,以对路基充分压实。车辆在往复移动的过程中,必然存在着错车区域。而错车区域容易出现漏压的风险,因此往往需根据实际情况决定是否对路面进行重复碾压,这会造成作业面重复施工;或由于错车区域过大、错车轨迹过长,降低施工效率等问题。
3、当前的路径规划方法,并没有考虑到工程施工中无人驾驶错车距离大的问题,大型碾压车辆在碾压过程中存在着碾压轨迹多、错车频率高等问题,需预留出较大的错车区域来保证机械正常施工,给施工带来了较多的不便。
技术实现思路
1、本申请实施例的目的在于提供一种车辆自动错距方法,旨在解决当前的路径规划方法中,并没有考虑到工程施工中无人驾驶错车距离较大,大型碾压车辆在碾压过程中碾压轨迹多、错车频率高,需预留出较大的错车区域来保证机械正常施工,给施工带来了较多的不便的问题。
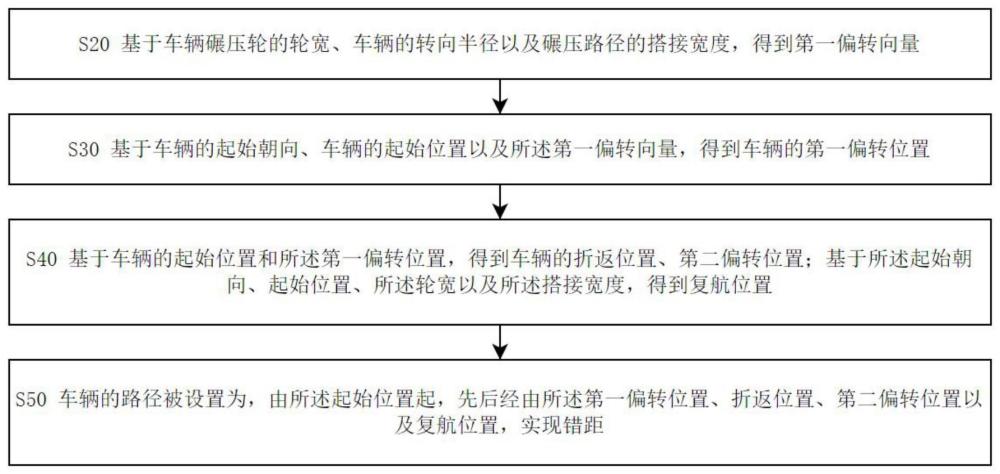
2、本申请实施例提供了一种车辆自动错距方法,所述方法包括:基于车辆碾压轮的轮宽、车辆的转向半径以及碾压路径的搭接宽度,得到第一偏转向量;
3、基于车辆的起始朝向、车辆的起始位置以及所述第一偏转向量,得到车辆的第一偏转位置;
4、基于车辆的起始位置和所述第一偏转位置,得到车辆的折返位置、第二偏转位置;基于所述起始朝向、起始位置、所述轮宽以及所述搭接宽度,得到复航位置;
5、所述第一偏转位置位于所述起始位置和所述折返位置这两点所连的线段的中点上,所述第二偏转位置位于所述折返位置和所述复航位置这两点所连的线段的中点上;
6、车辆的路径被设置为,由所述起始位置起,先后经由所述第一偏转位置、折返位置、第二偏转位置以及复航位置,完成错距。
7、本申请实施例的另一目的在于,提供一种车辆自动错距装置,所述车辆自动错距装置包括:
8、第一偏转向量获取模块,用于基于车辆碾压轮的轮宽、车辆的转向半径以及碾压路径的搭接宽度,得到第一偏转向量;
9、第一偏转位置获取模块,用于基于车辆的起始朝向、车辆的起始位置以及所述第一偏转向量,得到车辆的第一偏转位置;
10、折返位置、第二偏转位置以及复航位置获取模块,用于基于车辆的起始位置和所述第一偏转位置,得到车辆的折返位置、第二偏转位置;并基于所述起始朝向、起始位置、所述轮宽以及所述搭接宽度,得到复航位置;所述第一偏转位置位于所述起始位置和所述折返位置这两点所连的线段的中点上,所述第二偏转位置位于所述折返位置和所述复航位置这两点所连的线段的中点上;
11、错距实现模块,车辆的路径被设置为,由所述起始位置起,先后经由所述第一偏转位置、折返位置、第二偏转位置以及复航位置,实现错距。
12、本申请实施例的另一目的在于,提供一种车载电脑,包括存储器和处理器,所述存储器中存储有计算机程序,所述计算机程序被所述处理器执行时,使得所述处理器执行如上所述的一种车辆自动错距方法的步骤。
13、本申请实施例的另一目的在于,提供一种自动错距系统,所述系统包括:
14、如上所述的一种车载电脑,用于执行如上所述的自动错距方法;以及
15、一种车辆,与所述车载电脑有线和/或无线连接,用于执行如车载电脑的控制指令。
16、本申请实施例提供的一种车辆自动错距方法,通过设置碾压过程中的关键节点,根据关键节点进行转向设置。相对比传统的自动或手动转弯方法,在工期、质量、效益等方面均有创新和提高,该施工方法可显著减少车辆的转弯距离和行驶路径,提高碾压效率。并且,与传统转弯方法相比,本方案可显著减少转向时漏压区域的面积。
技术特征:
1.一种车辆自动错距方法,其特征在于,所述方法包括:
2.根据权利要求1所述的车辆自动错距方法,其特征在于,车辆由所述起始位置到所述第一偏转位置的路径、由所述第一偏转位置到所述折返位置的路径、由所述折返位置到所述第二偏转位置的路径以及由所述第二偏转位置到所述复航位置的路径,均各为一段弧度和弧长完全相同的弧形;
3.根据权利要求1所述的车辆自动错距方法,其特征在于,所述复航位置到所述起始位置的距离z为:z=a-x,
4.根据权利要求1所述的车辆自动错距方法,其特征在于,所述基于车辆碾压轮的轮宽、车辆的转向半径以及碾压路径的搭接宽度,得到的第一偏转向量为:
5.根据权利要求1所述的车辆自动错距方法,其特征在于,车辆的运动方式被设置为:
6.根据权利要求1~5中任意一项权利要求所述的车辆自动错距方法,其特征在于,车辆的转向半径为车辆最小的转弯半径。
7.根据权利要求1所述的车辆自动错距方法,其特征在于,车辆在达到所述折返位置后前往所述复航位置的方式为:由所述折返位置直接倒车,经由所述第二折返位置,倒车至所述复航位置。
8.一种车辆自动错距装置,其特征在于,所述车辆自动错距装置包括:
9.一种车载电脑,其特征在于,包括存储器和处理器,所述存储器中存储有计算机程序,所述计算机程序被所述处理器执行时,使得所述处理器执行权利要求1至7中任一项权利要求所述的一种车辆自动错距方法的步骤。
10.一种自动错距系统,其特征在于,所述系统包括:
技术总结
本发明适用于车辆路径规划技术领域,提供了一种车辆自动错距方法、装置、系统及一种车载电脑,基于车辆碾压轮的轮宽、车辆的转向半径以及碾压路径的搭接宽度,得到第一偏转向量;基于车辆的起始朝向、车辆的起始位置以及所述第一偏转向量,得到车辆的第一偏转位置;基于车辆的起始位置和所述第一偏转位置,得到车辆的折返位置、第二偏转位置;基于起始朝向、起始位置、轮宽以及所述搭接宽度,得到复航位置;车辆的路径被设置为,由起始位置起,先后经由第一偏转位置、折返位置、第二偏转位置以及复航位置,完成错距。本方案通过设置碾压过程中的关键节点,根据关键节点进行转向,相对比传统错距方法,显著减少了转弯距离和车辆的行驶路径,提高了碾压效率。
技术研发人员:王永亮,任晓磊,张心欣,张玮,曹林宽,郎超,刘彦卿,杨振锋
受保护的技术使用者:河北省水利科学研究院
技术研发日:
技术公布日:2024/3/24
- 还没有人留言评论。精彩留言会获得点赞!