一种柔性多体动力学方法验证的实验装置
本发明属于多体系统动力学建模领域,涉及一种柔性多体动力学方法验证的实验装置。
背景技术:
1、柔性多体动力学作为一种新兴的研究方向,在机器人、航空航天、汽车工程等领域具有广泛的应用前景。然而,柔性多体动力学建模理论的复杂性和验证难度一直是该领域研究的难点和瓶颈。目前,国内外学者在柔性多体动力学建模理论方面取得了一系列进展,但是如何验证这些理论仍然是一个亟待解决的问题。特别是在多段柔性梁方面的验证,由于其结构复杂、响应难以测量,导致相关实验装置目前比较匮乏,尤其是针对多个柔性部件的实验装置基本上处于空白状态。此外,大柔性梁实验的响应测量一直是难题,如何准确地测量其响应是该领域研究中需要解决的另一个重要问题。因此,开发一种能够有效验证柔性多体动力学建模理论的实验系统,对于该领域的研究和发展具有重要意义。
技术实现思路
1、为了解决上述问题,本发明提供了一种柔性多体动力学方法验证的实验装置,可以用于柔性多体动力学建模理论和仿真程序的验证研究。
2、本发明提供的一种柔性多体动力学方法验证的实验装置,包括:
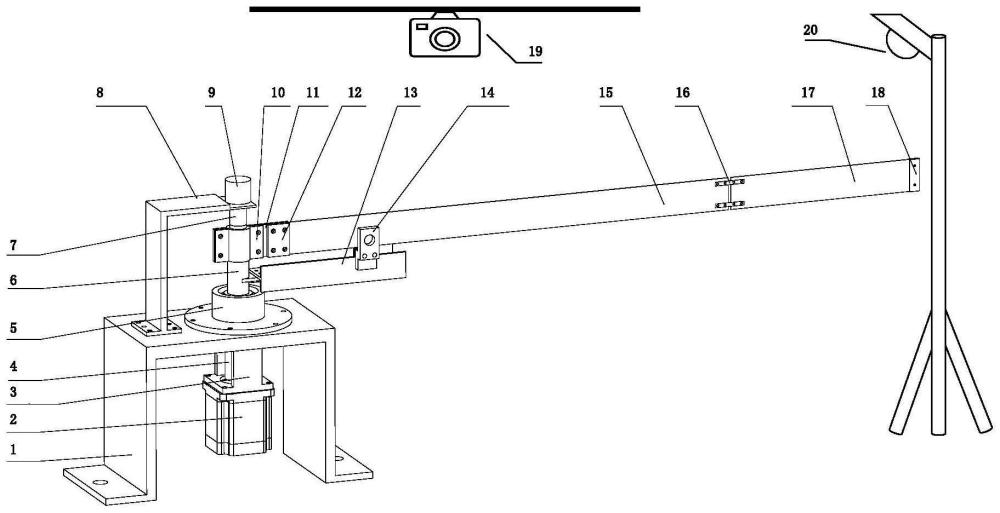
3、结构系统,包含柔性扁梁的试验件、大刚度随动旋转辅助梁和配重片;试验件为柔性梁,试验件和辅助梁的一端均与同一轴固定,以使得辅助梁和试验件根部旋转角相同;在试验件的自由端设置有配重片;
4、驱动系统,通过伺服电机驱动所述轴运动;
5、测量系统,包含加速度传感器、角位移传感器、电涡流传感器、高速摄像机;
6、连接系统,包含等效扭转弹簧片;所述试验件包含两段,两段柔性梁之间通过等效扭转弹簧片固定一起;改变所述等效扭转弹簧片的刚度,调节柔性梁的一阶弯曲频率。
7、所述的结构系统中,实验用的柔性梁选用金属材料的柔性梁段作为试验件,选用大刚度金属材料的工字梁作为辅助梁,在一端为固定支撑的边界条件下,试验件和辅助梁的一阶弯曲频率相差在2个数量级之上,因此完全可以忽略辅助梁的弹性振动。在辅助梁上安装的电涡流计测量柔性梁实验件的横向位移。
8、所述的驱动系统中,一个直流伺服电机通过联轴器与所述轴连接,通过伺服控制系统控制所述轴的起转、停止或以某特定规律旋转。所述轴通过轴承座安装在基座上,所述电机通过电机支架安装在基座上。
9、所述的测量系统中,高速摄像机安装在整个实验装置顶部,用于获取实验过程中试验件的视频图像;加速度传感器安装在试验件上若干位置,测量所在试验件位置的加速度;电涡流传感器安装在辅助梁上的,靠近试验件与轴固定的根部,测量试验件的横向位移;安装在所述轴的角位移传感器,测量所述轴的角位移。
10、所述的连接系统改变等效扭转弹簧片的刚度,调节柔性梁的一阶弯曲频率,以用于研究不同工况。连接系统还包括等效扭转弹簧片的设计模块,基于等效扭转弹簧片为本发明的柔性梁试验件进行建模,使用传递矩阵法快速建立柔性梁模型,将柔性梁离散化为若干个无质量梁段和集中质量点、铰支点、拉压与扭转弹簧构成的树形系统。
11、树形系统中,将柔性梁上坐标x处的状态向量表示为z(x)=[y θ m q]t,其中y为挠度,θ为转角,m为弯矩,q为剪力,上角标t表示转置。
12、树形系统中的状态向量在各段前后的变化用传递矩阵表示,传递矩阵包括场传递矩阵、点传递矩阵、以及针对带扭转弹簧铰链的点传递矩阵。
13、对于无质量的伯努利-欧拉梁段,有场传递矩阵[hf]i如下:
14、
15、对于中间环节,第i个梁段不带扭转弹簧铰链,有通用的点传递矩阵[hs]i如下:
16、
17、第i个梁段带扭转弹簧的铰链,有点传递矩阵[hhinge]i如下:
18、
19、根据上述3个矩阵,可构造出单梁和带扭簧铰链的双梁两种理论仿真模型。相较于有限元方法,建模更加快速,便于参数辨识和分析。树形系统的状态向量的广义特征值fi(kθ)即为系统特征频率。通过模态实验测得模型树形系统k个特征频率fiexp,i=1,2,…k,k为正整数,求取下面目标函数辨识出扭转弹簧片的等效刚度kθ;
20、
21、其中,fi(kθ)是系统状态向量的第i个广义特征值。
22、相比现有技术,本发明的优点和有益效果在于:
23、(1)本发明装置实现了一种用于多段柔性梁的动力学实验系统,填补了国内空白,为验证柔性多体动力学建模理论和仿真技术提供了平台;
24、(2)本发明装置为了克服单一测量设备存在的固有缺陷,选用了4套测量设备,采用多种测量数据融合的方式,以捕获实验数据,更加精确,可以较为全面地捕捉动力系统的复杂特性;
25、(3)本发明装置的连接系统,通过改变等效扭转弹簧片的刚度,可以调节柔性梁的一阶弯曲频率,以用于研究不同工况。同时,本发明针对等效扭转弹簧片连接的柔性梁试验件,基于上述的场传递矩阵、点传递矩阵和带扭转弹簧的铰链有点传递矩阵,能快速建立单梁和带扭簧铰链的双梁两种理论仿真模型,建模更加快速;再基于带未知参数的整体传递矩阵,再结合模态试验数据和系统辨识方法,可以测得扭簧等效刚度,便于参数辨识和分析。
技术特征:
1.一种柔性多体动力学方法验证的实验装置,其特征在于,包含结构系统、驱动系统、测量系统和连接系统;
2.根据权利要求1所述的实验装置,其特征在于,所述的结构系统中,试验件为金属材料的柔性梁,辅助梁选用大刚度金属材料的工字梁;在柔性梁和辅助梁的一端为固定支撑的边界条件下,柔性梁和辅助梁的一阶弯曲频率相差在2个数量级之上。
3.根据权利要求1或2所述的实验装置,其特征在于,所述的结构系统中,试验件包含內段和外段两部分,试验件內段的一端通过等效扭转弹簧片与试验件外段的一端固定一起,在试验件外段的另一端设置有配重片,试验件內段的另一端通过夹具和盖板固定在轴上,辅助梁的一端也固定在所述轴上。
4.根据权利要求1所述的实验装置,其特征在于,所述的驱动系统中,一个直流伺服电机通过联轴器与所述轴连接,通过伺服控制系统控制所述轴的起转、停止或以设定规律旋转;所述轴通过轴承座安装在基座上,所述电机通过电机支架安装在基座上。
5.根据权利要求1所述的实验装置,其特征在于,所述的测量系统中,在试验前对电涡流传感器进行校准标定试验,获取电涡流传感器的测量电压和试验件横向位移之间的函数关系式。
6.根据权利要求1所述的实验装置,其特征在于,所述的连接系统,还包括夹具,用于将试验件根部与轴固定。
7.根据权利要求1所述的实验装置,其特征在于,所述的连接系统还包括等效扭转弹簧片的设计模块,该模块使用传递矩阵法对所述的柔性梁试验件建模,将柔性梁离散化为若干个无质量梁段和集中质量点、铰支点、拉压与扭转弹簧构成的树形系统;
8.根据权利要求1或7所述的实验装置,其特征在于,所述的连接系统还包括等效扭转弹簧片的设计模块,该模块针对所述试验件的两段结构,建立带扭簧铰链的双梁模型,末端带加速度计,模型树形系统的总传递函数模型为z(xn)=[hf]1[hhinge]1[hf]2[hs]1z(x0),其中x0、xn分别是树形系统的根部、梢部位置,z(x0)、z(xn)分别是对应位置的状态向量,[hf]1、[hf]2分别是第1个、第2个梁段的场传递矩阵,[hhinge]1是第1个梁段的带扭转弹簧铰链的点传递矩阵,[hs]1是第1个梁段的点传递矩阵;
技术总结
本发明公开了一种柔性多体动力学方法验证的实验装置,用于柔性多体动力学实验领域。本发明系统包括结构系统、驱动系统、测量系统和连接系统;结构系统包括柔性试验件、辅助梁和配重片;驱动系统包括伺服电机及其反馈控制部件;测量系统包括加速度计、角位移传感器、电涡流传感器和高速摄影机;连接系统包含将两段的柔性梁试验件固定一起的等效扭转弹簧片及其设计模块,改变扭簧刚度调节柔性梁的系统基频。本发明提供了用于多段柔性梁动力学实验的装置,能准确测量实验件的位移响应和加速度响应,与建模分析结果相吻合,为相关研究和发展提供重要工具。
技术研发人员:吴志刚,骆明,韩君徽,杨超
受保护的技术使用者:北京航空航天大学
技术研发日:
技术公布日:2024/5/6
- 还没有人留言评论。精彩留言会获得点赞!