虚实融合转向系统硬件在环测试方法、系统、存储介质与流程
本发明涉及车辆测试,尤其是涉及一种虚实融合转向系统硬件在环测试方法、系统、存储介质。
背景技术:
1、转向系统通过操纵转向盘,将转向盘的转动运动传递到车轮,从而改变车辆行驶方向。同时,转向系统也可以把轮胎与地面之间的接触信息传递回方向盘,产生路感反馈。这些返回反馈包括道路状况,也包括轮胎和路面附着力以及是否接近极限。转向系统直接影响了车辆操纵性,即车辆被操纵来改变行驶方向或路径的能力。对转向系统进行测试,精确描述转向盘角输入与车辆横摆、侧向响应间相互影响关系。
2、公告号为cn218444490u的专利公开了一种转向系统硬件在环测试台架,包括转向控制器、车轮负载模拟电机、力传感器和转向器,所述转向控制器、所述力传感器与所述车轮负载模拟电机通信连接,所述车轮负载模拟电机的输出轴与所述转向器连接,所述力传感器设于所述车轮负载模拟电机与所述转向器之间,所述力传感器用于检测车轮负载模拟电机所输出的阻力。该专利能够实现模拟不同路面、不同车速、不同车型下的转向阻力。尽管该专利提出了新型的转向系统硬件在环测试台架,但未描述如何模拟不同路面、不同车速、不同车型下的转向阻力。
3、公开号为cn114018605a的专利申请属于汽车转向与自动驾驶算法开发与测试领域,特别是涉及一种电机加载式转向阻力模拟方法及利用该模拟方法制作的装置,该方法通过建立带转向的模型确定横拉杆的速度系数和位移系数,然后通过动力学方程对转向阻力进行研究;该装置包括安装座、伺服电机、电缸和动作部,实现了单独的转向系统硬件在环测试和整车在环转鼓测试。解决了现有的转向阻力模拟系统设计复杂、体积大、成本高、控制困难的问题和现有的转向阻力模拟系统不能满足单独的转向系统硬件在环台架对阻力模拟的需求的问题。该申请主要通过车辆动力学仿真软件建立转向场景,设置不同的车速完成所述转向场景并记录车速、横拉杆速度、横拉杆位移和横拉杆助力的数据,根据所述车速、横拉杆速度、横拉杆位移和横拉杆助力的数据拟合出转向系数,无法进行实时硬件在环测试。
4、综上,当前缺少一种实现转向系统硬件在环测试的方法。
技术实现思路
1、本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种虚实融合转向系统硬件在环测试方法、系统、存储介质,以实现转向系统硬件在环测试。
2、本发明的目的可以通过以下技术方案来实现:
3、本发明的一个方面,提供了一种虚实融合转向系统硬件在环测试方法,包括如下步骤:
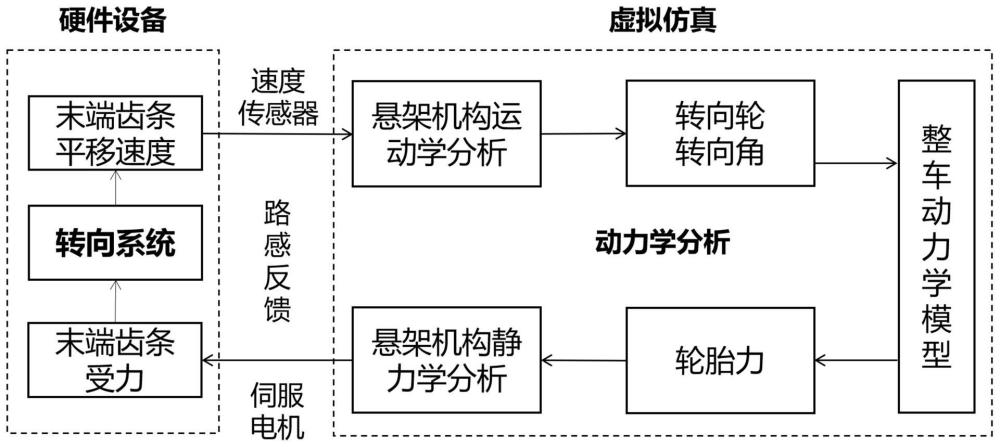
4、利用预先构建的悬架机构模型,基于采集到的真实环境下的转向系统末端齿条平移速度,计算车轮转向角速度,从而确定车轮转向角;
5、利用预先构建的与测试车辆类型匹配的整车动力学模型,基于所述车轮转向角以及输入的轮端驱动力矩和制动力矩,通过虚拟仿真计算测试车辆的轮胎受力;
6、利用所述悬架机构模型,基于所述轮胎受力,计算考虑路感反馈的末端齿条反馈力并输出至力加载模块以作用在所述转向系统,实现转向系统硬件在环测试。
7、作为优选的技术方案,所述的整车动力学模型为考虑车辆纵向运动、横向运动、横摆运动以及簧上质量的侧倾运动的纵-横-横摆-侧倾耦合动力学模型。
8、作为优选的技术方案,所述的轮胎受力包括纵向力矩、横向力矩和回正力矩。
9、作为优选的技术方案,基于轮胎向滑移率、侧偏角和垂直载荷计算所述轮胎受力。
10、作为优选的技术方案,所述的悬架机构模型为双横臂悬架机构模型和/或麦佛逊悬架机构模型。
11、作为优选的技术方案,所述的末端齿条反馈力的计算包括如下步骤:
12、基于所述轮胎受力,计算在轮胎-地面接触点对转向系统主销轴的反馈力矩;
13、基于所述反馈力矩计算末端齿条反馈力。
14、作为优选的技术方案,所述的力加载模块包括伺服电机。
15、作为优选的技术方案,所述的转向系统末端齿条平移速度通过传感器采集得到。
16、本发明的另一个方面,提供了一种虚实融合转向系统硬件在环测试系统,包括:
17、整车动力学建模模块,用于以车轮转向角以及获取到的轮端驱动力矩和制动力矩,通过仿真计算测试车辆的轮胎受力作为输入,通过虚拟仿真计算测试车辆的轮胎受力;
18、悬架机构建模模块,用于以采集到的真实环境下的转向系统末端齿条平移速度,计算车轮转向角,还用于以轮胎受力为输入,计算考虑路感反馈的末端齿条反馈力;
19、力加载模块,用于将所述末端齿条反馈力在所述转向系统。
20、本发明的另一个方面,提供了一种计算机可读存储介质,包括供电子设备的一个或多个处理器执行的一个或多个程序,所述一个或多个程序包括用于执行上述虚实融合转向系统硬件在环测试方法的指令。
21、与现有技术相比,本发明具有以下有益效果:
22、实现转向系统硬件在环测试:利用整车动力学模型,精确描述车辆实时动态响应,对真实转向系统操纵性进行有效测试。相较于其他测试方法,该方法不仅考虑悬架机构对车轮转向运动及路感反馈的影响,也可以满足车辆悬架结构多样性需求,降低转向系统测试台架成本,实现更加灵活的转向系统测试。
技术特征:
1.一种虚实融合转向系统硬件在环测试方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的一种虚实融合转向系统硬件在环测试方法,其特征在于,所述的整车动力学模型为考虑车辆纵向运动、横向运动、横摆运动以及簧上质量的侧倾运动的纵-横-横摆-侧倾耦合动力学模型。
3.根据权利要求1所述的一种虚实融合转向系统硬件在环测试方法,其特征在于,所述的轮胎受力包括纵向力矩、横向力矩和回正力矩。
4.根据权利要求1所述的一种虚实融合转向系统硬件在环测试方法,其特征在于,基于轮胎向滑移率、侧偏角和垂直载荷计算所述轮胎受力。
5.根据权利要求1所述的一种虚实融合转向系统硬件在环测试方法,其特征在于,所述的悬架机构模型为双横臂悬架机构模型和/或麦佛逊悬架机构模型。
6.根据权利要求1所述的一种虚实融合转向系统硬件在环测试方法,其特征在于,所述的末端齿条反馈力的计算包括如下步骤:
7.根据权利要求1所述的一种虚实融合转向系统硬件在环测试方法,其特征在于,所述的力加载模块包括伺服电机。
8.根据权利要求1所述的一种虚实融合转向系统硬件在环测试方法,其特征在于,所述的转向系统末端齿条平移速度通过传感器采集得到。
9.一种虚实融合转向系统硬件在环测试系统,其特征在于,包括:
10.一种计算机可读存储介质,其特征在于,包括供电子设备的一个或多个处理器执行的一个或多个程序,所述一个或多个程序包括用于执行如权利要求1-8任一所述虚实融合转向系统硬件在环测试方法的指令。
技术总结
本发明涉及一种虚实融合转向系统硬件在环测试方法、系统、存储介质,方法包括如下步骤:利用预先构建的悬架机构模型,基于采集到的真实环境下的转向系统末端齿条平移速度,计算车轮转向角速度,从而确定车轮转向角;利用预先构建的与测试车辆类型匹配的整车动力学模型,基于所述车轮转向角以及输入的轮端驱动力矩和制动力矩,通过虚拟仿真计算测试车辆的轮胎受力;利用所述悬架机构模型,基于所述轮胎受力,计算考虑路感反馈的末端齿条反馈力并输出至力加载模块以作用在所述转向系统,实现转向系统硬件在环测试。与现有技术相比,本发明不仅可以准确实时对转向系统进行测试,同时也可以快速高效配置整车系统悬架类型,满足整车悬架系统多样性需求。
技术研发人员:殷承良,周国峰,王亚飞,秦文刚,代堃鹏,谢震
受保护的技术使用者:上海淞洋企业管理有限公司
技术研发日:
技术公布日:2024/3/21
- 还没有人留言评论。精彩留言会获得点赞!