使用方波数字线性调频信号检测光学线性调频距离的系统的制作方法
本申请涉及使用方波数字线性调频信号检测光学线性调频距离的系统。
背景技术:
1、通常由助记符激光雷达(lidar)引用用于光检测和测距的距离的光学检测用于从测高到成像到避免碰撞的各种应用。与常规的微波测距系统(例如,无线电波检测和测距(radar))相比,lidar在更小的波束尺寸的情况下提供更精细的尺度范围分辨率。距离的光学检测可以通过几种不同的技术来完成,包括基于光脉冲到目标的往返行程时间进行直接测距,以及基于传输的线性调频光信号与从目标散射的返回信号之间的频率差进行线性调频检测。
2、为了实现可接受的测距精度和检测灵敏度,直接远程lidar系统使用具有低脉冲重复率和极高脉冲峰值功率的短脉冲激光器。高脉冲功率可能导致光学部件快速劣化。线性调频lidar系统使用具有相对较低峰值光功率的长光脉冲。在这种配置中,测距精度取决于线性调频带宽而不是脉冲持续时间,并且因此仍然可以获得优异的测距精度。
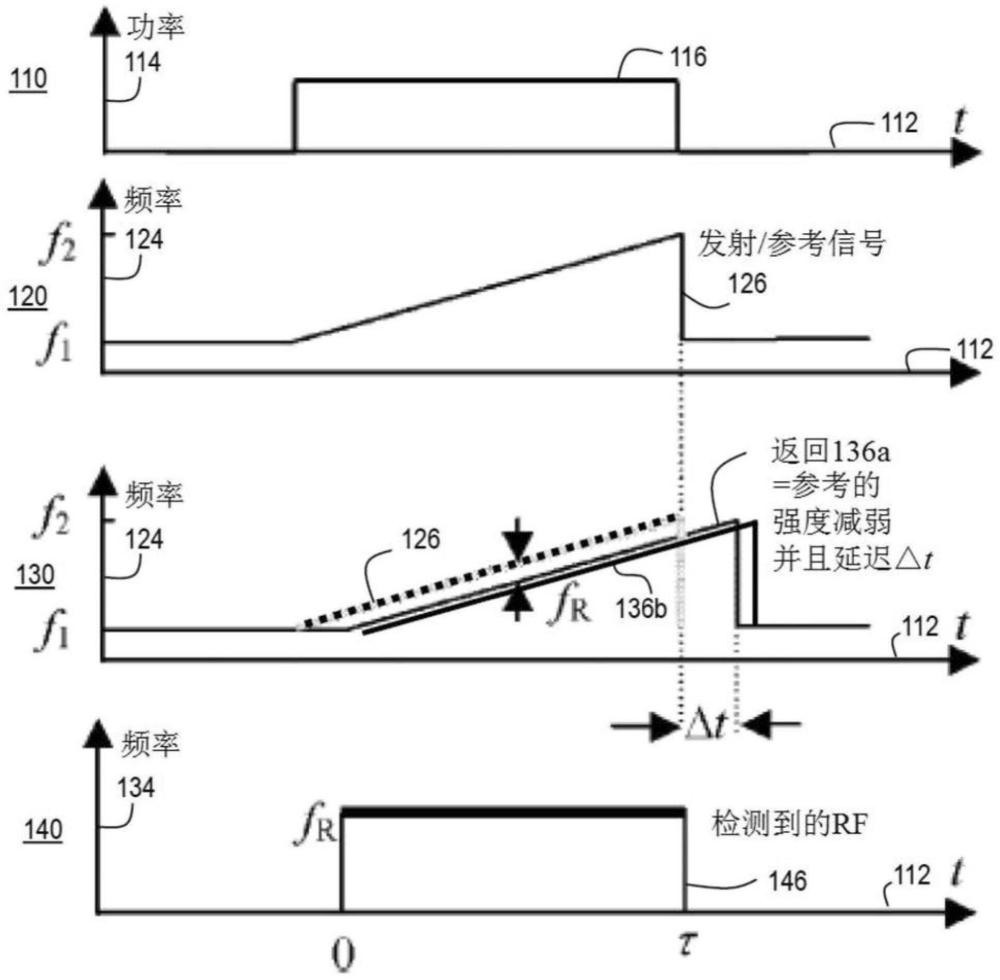
3、使用宽带射频(rf)电信号调制光载波已经实现了有用的光线性调频带宽。线性调频lidar的最新进展包括使用相同的调制光载波作为参考信号,该参考信号在光检测器处与返回信号结合,以在产生的电信号中产生相对较低的拍频,该拍频与参考和返回的光信号之间的频率的差异成比例。在检测器处对频率差异的这种拍频检测称为外差检测。它具有本领域已知的几个优点,诸如使用现成的和廉价可用性的rf部件的优点。除了与本文所使用的术语不一致的术语外,在专利7,742,152中描述的最近工作示出使用从发射的光信号中分离出的光信号作为参考光信号的光学部件的新颖的更简单的布置。这种布置在该专利中称为零差检测。
技术实现思路
1、在常规的线性调频lidar系统中,提供射频源以便以带宽(例如500兆赫兹(mhz,1mhz=106赫兹)至10千兆赫(\ghz,1ghz=109hz))产生rf电信号来对光学载波进行调制。本发明人已经认识到由常规射频源产生的rf电信号具有明显的缺点。例如,由数模转换器(dac)或直接数字合成(dds)设备生成的rf电信号的带宽通常在约4ghz处最大,这限制了lidar系统的测距精度。此外,dac或dds设备体积庞大,使得在尺寸和重量有限且昂贵(例如20万美元)的包装中消耗了宝贵的空间。此外,尽管可以将由das或dds设备生成的rf电信号的带宽增加到约10ghz,但是这需要额外的步骤(例如rf倍增、光学倍增),这些步骤需要高功率并且将不希望的特性引入信号。提供了一种装置和方法,该装置和方法解决了由线性调频lidar系统中的常规射频源提供的常规rf信号的缺点。该设备和方法涉及在线性调频lidar系统中使用现场可编程门阵列(fpga)收发器进行数字线性调频生成。
2、在第一组实施例中,提供了一种用于将方波数字线性调频信号用于光学线性调频距离检测的装置。该装置包括用于发射光信号的激光源。该装置还包括rf波形发生器,该rf波形发生器用于产生基于方波数字线性调频信号的输入数字线性调频信号。该装置还包括调制器,该调制器用于基于输入数字线性调频信号来调制光信号的频率。此外,该装置包括将光信号分成发射光信号和参考光信号的分光器。该装置还包括检测器,该检测器组合参考光信号和基于被对象反向散射的发射光信号的返回光信号。检测器被配置为基于组合的参考光信号和返回光信号来产生电输出信号。该装置还包括处理器,该处理器基于对电输出信号进行傅立叶变换的特征来确定距该对象的距离。
3、在第二组实施例中,提供了一种用于将方波数字线性调频信号用于光学线性调频距离检测的方法。该方法包括:从激光源发射光信号;以及利用调制器基于来自rf波形发生器的输入数字线性调频信号调制光信号的频率。输入数字线性调频信号基于方波数字线性调频信号。此外,该方法包括利用分光器将光信号分成发射光信号和参考光信号。该方法还包括在检测器处组合参考光信号和返回光信号。返回光信号基于被对象反向散射的发射光信号。此外,该方法包括基于组合步骤从检测器产生电输出信号。该方法还包括利用处理器基于对输出的电输出信号进行傅立叶变换的特征确定距该对象的距离。
4、简单地通过说明许多特定实施例和实施方式,包括预期用于执行本发明的最佳模式,容易从以下具体实施方式明白其他方面、特征和优点。其他实施例还能够具有其他和不同的特征和优点,并且可以在各种明显方面中修改其若干细节,这全部不脱离本发明的精神和范围。因此,附图和描述应当被视为本质上为说明性而不是限制性的。
技术特征:
1.一种光检测和测距lidar系统,包括:
2.根据权利要求1所述的lidar系统,还包括参考路径,所述参考路径被配置为延迟所述参考信号。
3.根据权利要求1所述的lidar系统,其中,所述参考信号是通过从所述经调制的载波分割而从所述载波生成的。
4.根据权利要求1所述的lidar系统,其中,所述激光源是第一激光源,并且所述参考信号是由与所述第一激光源分开的第二激光源生成的。
5.根据权利要求1所述的lidar系统,其中,所述线性调频信号的频率在第一频率和第二频率之间改变。
6.根据权利要求1所述的lidar系统,还包括滤波器,所述滤波器被配置为将所述线性调频信号的动态范围增加到从约20db到约50db。
7.根据权利要求1所述的lidar系统,其中,所述线性调频信号的带宽从约10ghz到约30ghz。
8.根据权利要求1所述的lidar系统,其中,所述处理器被配置为使用所述多普勒频移确定到所述对象的距离。
9.根据权利要求1所述的lidar系统,还包括分光器,所述分光器被配置为将所述载波划分成所述发射信号和所述参考信号。
10.根据权利要求1所述的lidar系统,其中,所述处理器被配置为通过使用所述参考信号和所述返回信号执行傅立叶变换来确定所述多普勒频移。
11.根据权利要求1所述的lidar系统,还包括射频rf波形发生器,所述rf波形发生器包括所述均衡器,所述rf波形发生器被配置为作为数字信号向所述调制器提供所述线性调频信号。
12.一种系统,包括:
13.根据权利要求12所述的系统,其中,所述装置被配置成延迟所述参考信号,使得与所述返回信号一起接收所述参考信号。
14.根据权利要求12所述的系统,其中,所述线性调频信号的频率在第一频率和第二频率之间改变。
15.根据权利要求12所述的系统,其中,所述装置被配置为对所述线性调频信号进行滤波,以将所述线性调频信号的动态范围增加到从约20db到约50db。
16.根据权利要求12所述的系统,其中,所述线性调频信号的带宽从约10ghz到约30ghz。
17.根据权利要求12所述的系统,其中,所述处理器被配置为使用所述多普勒频移确定到所述对象的距离。
18.一种系统,包括:
19.根据权利要求18所述的系统,其中,所述一个或多个处理器被配置为使用所述多普勒频移确定到所述对象的距离。
20.根据权利要求18所述的系统,其中,所述处理器被配置为通过使用所述参考信号和所述返回信号执行傅立叶变换来确定所述多普勒频移。
技术总结
本发明涉及使用方波数字线性调频信号检测光学线性调频距离的系统。一种光检测和测距激光雷达系统包括:激光源,所述激光源被配置为生成载波;均衡器,所述均衡器被配置为调制线性调频信号的振幅;调制器,所述调制器被配置为使用所述线性调频信号调制所述载波的频率;一个或多个扫描光学器件,所述一个或多个扫描光学器件被配置为使用经调制的载波生成发射信号,并且发射所述发射信号;以及处理器,所述处理器被配置为基于返回信号和参考信号确定对象的多普勒频移;其中,响应于所述发射信号从所述对象接收所述返回信号。
技术研发人员:斯蒂芬·C·克劳奇,詹姆斯·柯里,特伦顿·贝格,理查德·芬克,凯尔·奥利弗,丹尼尔·弗格森
受保护的技术使用者:欧若拉运营公司
技术研发日:
技术公布日:2024/4/24
- 还没有人留言评论。精彩留言会获得点赞!