一种用于视觉目标跟踪的卡尔曼滤波调参方法与流程
本发明涉及自动驾驶视觉感知领域,具体地说,本发明涉及一种用于视觉目标跟踪的卡尔曼滤波调参方法。
背景技术:
1、目标跟踪是自动驾驶任务中非常重要的一部分,在计算机视觉领域也具有广泛的研究,目标跟踪任务分为单目标跟踪和多目标跟踪,常见的目标跟踪算法有卡尔曼滤波、粒子滤波以及一些相关滤波的算法,包括mosse、kcf、eco、samf等,随着深度学习的不断进步,目前工业界常用的目标跟踪算法逐渐发展为深度特征和卡尔曼滤波结合的方式。
2、卡尔曼滤波是一种基于概率论和线性代数的算法,用于处理具有随机噪声的动态系统,主题思路是将系统的状态表示为一个随机向量,并通过观测数据和模型方程来对随机变量进行估计和预测;在目标跟踪任务中,目标的坐标即为卡尔曼滤波中的随机变量,目标的视觉特征即为观测数据,通过视觉特征的匹配以及更新,估计目标的运动轨迹。
3、现有的包括eco、kcf等视觉目标跟踪方案会占用较多的cpu和gpu资源,与目标检测是串行关系,会导致自动驾驶车上的cpu和gpu资源不够,影响目标识别的精度和效率。卡尔曼滤波对于目标检测和跟踪有很好的兼容性,有效提升了资源利用效率。但是现有方案中的卡尔曼滤波对观测噪声和过程噪声没有特殊处理,会导致识别目标抖动、位置不准确的问题,本文对以上问题在实车应用中都做出了改善。
技术实现思路
1、本发明提供一种用于视觉目标跟踪的卡尔曼滤波调参方法,提出一套基于视觉特征的卡尔曼滤波调参方案,充分利用自动驾驶过程中多个传感器的信息,输出更为准确的目标3d位置,对于测试园区内的大部分障碍物具有普适性,节省运算资源,提高运算效率。
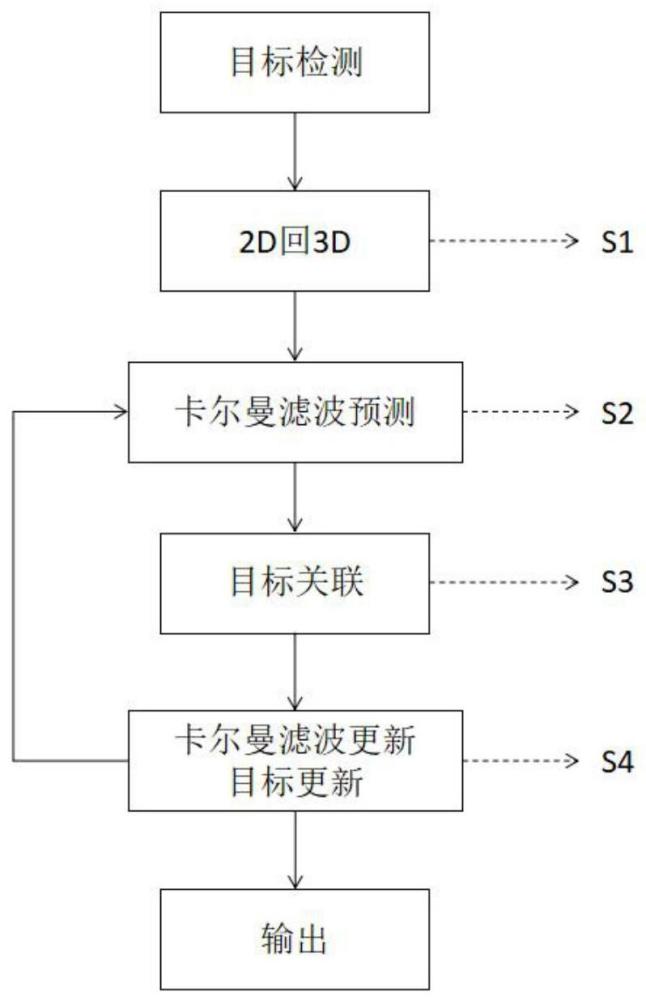
2、为了实现上述目的,本发明采取的技术方案为:一种用于视觉目标跟踪的卡尔曼滤波调参方法,具体包括以下步骤:
3、步骤s1,根据2d回3d模块得到障碍物的3d坐标,生成观测目标模型,包含目标的位置信息、速度信息、加速度信息,
4、定义如下:
5、x=[x,y,z,vx,vy,vz,ax,ay,az]
6、其中,x、y、z分别表示三个方向上的位置信息,v表示速度信息,a表示加速度信息;
7、步骤s2,卡尔曼滤波预测;
8、步骤s3,目标关联;
9、步骤s4,卡尔曼滤波更新。
10、优选的,所述步骤s2,卡尔曼滤波预测,具体步骤为:
11、s2.1:代入卡尔曼滤波预测过程公式:
12、xk=akxk-1+bkuk
13、
14、其中,x为状态向量,a为状态转移矩阵,b为控制矩阵,u为控制向量,p为协方差矩阵,q为过程噪声;
15、s2.2:设计相关参数内容,其中状态转移矩阵a、控制矩阵b可以根据速度、加速度公式得出;
16、s2.3:预测过程的调参主要是针对过程噪声q的调参,本发明针对q进行了特殊设计:
17、
18、上式可以看出,过程噪声q的调整来源于控制向量u的调整,因此可以通过对u的调整同时修改状态向量x和协方差矩阵p。
19、优选的,所述步骤s3,目标关联,具体操作步骤为:
20、s3.1:下一帧通过2d回3d,得到新观测目标信息,即为观测向量z;
21、z=[x,y,z]
22、s3.2:通过iou和类别判断,关联观测目标和跟踪目标,得到关联匹配对。
23、优选的,所述步骤s4,卡尔曼滤波更新,具体操作步骤为:
24、s4.1:观测向量代入卡尔曼滤波更新公式:
25、x'k=xk+k'(z-xk)
26、p'k=pk-k'pk
27、k'=pk(pk+rk)-1
28、其中,z是当前观测,k’是卡尔曼增益,r是观测噪声;
29、s4.2:更新过程中的调参是对观测噪声r进行调整。
30、采用以上技术方案的有益效果是:
31、1、本发明提出一套基于视觉特征的卡尔曼滤波调参方案,充分利用自动驾驶过程中多个传感器的信息,输出更为准确的目标3d位置,对于测试园区内的大部分障碍物具有普适性,节省运算资源,提高运算效率。
技术特征:
1.一种用于视觉目标跟踪的卡尔曼滤波调参方法,其特征在于:具体包括以下步骤:
2.根据权利要求1所述的一种用于视觉目标跟踪的卡尔曼滤波调参方法,其特征在于:所述步骤s2,卡尔曼滤波预测,具体步骤为:
3.根据权利要求1所述的一种用于视觉目标跟踪的卡尔曼滤波调参方法,其特征在于:所述步骤s3,目标关联,具体操作步骤为:
4.根据权利要求1所述的一种用于视觉目标跟踪的卡尔曼滤波调参方法,其特征在于:所述步骤s4,卡尔曼滤波更新,具体操作步骤为:
技术总结
本发明公开了用于视觉目标跟踪的卡尔曼滤波调参方法,具体包括以下步骤:步骤S1,根据2D回3D模块得到障碍物的3D坐标,生成观测目标模型,包含目标的位置信息、速度信息、加速度信息,定义如下:X=[x,y,z,v<subgt;x</subgt;,v<subgt;y</subgt;,v<subgt;z</subgt;,a<subgt;x</subgt;,a<subgt;y</subgt;,a<subgt;z</subgt;]其中,x、y、z分别表示三个方向上的位置信息,v表示速度信息,a表示加速度信息;步骤S2,卡尔曼滤波预测;步骤S3,目标关联;步骤S4,卡尔曼滤波更新骤。本发明提出一套基于视觉特征的卡尔曼滤波调参方案,充分利用自动驾驶过程中多个传感器的信息,输出更为准确的目标3D位置,对于测试园区内的大部分障碍物具有普适性,节省运算资源,提高运算效率。
技术研发人员:王尚,王刃,段继强,丁琳
受保护的技术使用者:浙江飞碟汽车制造有限公司
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!