一种基于润滑原理的IMU冲击测量方法
本发明涉及imu测量,具体涉及一种基于润滑原理的imu冲击测量方法。
背景技术:
1、惯性测量单元(英文:inertial measurement unit,简称imu)是测量物体三轴角速率和加速度的装置,在航空航天、自动驾驶、地质勘探等领域有广泛的应用。
2、常规imu的采样频率在1000~8000hz,加速度量程在±8g内,陀螺仪量程在±245°/s内。
3、在imu冲击测量过程中,可以将imu测得的数据根据内嵌有imu的imu球是否发生碰撞分为碰撞前的数据、碰撞过程中的数据和碰撞后的数据。
4、imu球在碰撞前和碰撞后的惯性参数在采样频率范围内,未超出加速度量程,因此是可信的。
5、但是,imu球碰撞过程中的惯性参数,常常超出加速度量程和采样频率,导致imu球在碰撞时采集的信号数据是不可信的,继而无法准确测得imu球碰撞过程中的加速度。
技术实现思路
1、本发明的目的在于提供一种基于润滑原理的imu冲击测量方法,以解决现有技术中imu球碰撞过程中的惯性参数,常常超出加速度量程和采样频率,无法准确测得imu球碰撞过程中的加速度的技术问题。
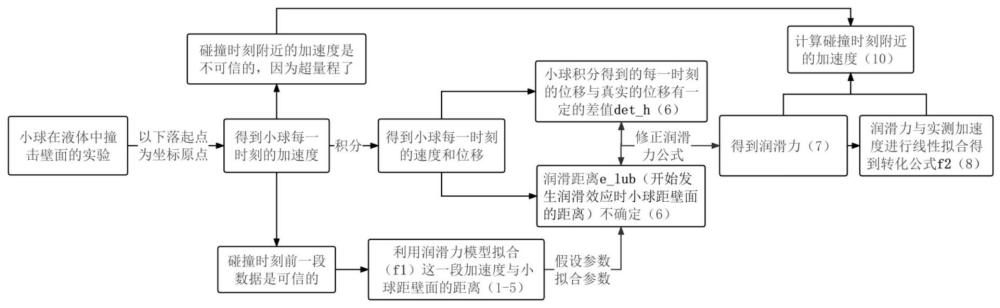
2、为解决上述技术问题,本发明具体提供一种基于润滑原理的imu冲击测量方法,包括以下步骤:
3、将imu球完全浸入容器内的液体中,后施加冲击载荷,使得imu球在容器内做冲击碰撞容器壁面的实验;
4、选择imu球在碰撞容器壁面前采集的,并由法向润滑力产生的加速度的实测数据,采用牛顿第二定律将加速度实测数据转化成imu球在碰撞容器壁面前所受的润滑力,该润滑力为可信数据;
5、根据法向润滑力模型推导出imu球的加速度与imu球到壁面的距离/imu球半径之间关系的拟合模型;
6、将可信的润滑力部分在拟合模型中进行插值,修正拟合公式中速度、润滑距离和位移的参数;
7、通过修正后的拟合模型计算碰撞时刻的imu球所受的力;
8、通过牛顿第二定律将imu球在碰撞时刻所受的力转化成碰撞时刻的加速度数据。
9、作为本发明的一种优选方案,所述法向润滑力公式为:
10、
11、
12、
13、
14、filubin为imu球受力由润滑力主导时的润滑力;
15、为球与壁面之间的相对挤压速度;
16、r0、h0为无量纲化的坐标;
17、ε为无量纲化的间隙距离;
18、ez+0为z方向的方向向量;
19、εlub为无量纲化的润滑距离;
20、α为球的半径和壁面的半径(∞)的倒数之和;
21、β为壁面的无量纲化半径(∞)。
22、作为本发明的一种优选方案,所述拟合模型为:
23、
24、
25、c1可根据润滑力公式,由imu球和流体参数直接得到;
26、a、b、c分别是润滑力公式中对速度、润滑距离和位移的修正参数;
27、f 1为实测加速度×imu球质量;
28、v为imu球速度;
29、e为imu球到壁面距离/imu球半径;
30、r1为imu球半径;
31、μ为液体粘度系数。
32、作为本发明的一种优选方案,采用牛顿第二定律转化润滑力和加速度的公式为:
33、f 2为实测加速度;
34、x为润滑力;
35、m为imu球质量;
36、通过修正后的公式f1计算imu球每一时刻加速度对应的润滑力,根据公式f 2对润滑力和加速度进行线性拟合可得到公式f 2中的参数。
37、作为本发明的一种优选方案,拟合润滑力和加速度的过程中,若起点附近有严重偏离拟合曲线的点,要将起点改为偏离点之后的的点。
38、作为本发明的一种优选方案,在所述拟合模型中插值的是[t1,t2]的数据段;t1为imu球为所受的力开始由润滑力主导,润滑力方向的加速度开始并持续为正的时刻;t2为碰撞前的第五个时刻的数据。
39、本发明与现有技术相比较具有如下有益效果:
40、本发明利用润滑过程的非线性(冲击强)和可控性(黏度密度可控)、刚性碰撞极限低的特点;基于润滑力公式和测量数据的结合,根据润滑力模型推导出一个拟合模型,利用参数未确定的拟合模型对碰撞前的润滑力进行内插,得到拟合模型中的参数,再使用参数已确定的拟合模型对碰撞时刻的润滑力进行计算。最后通过牛顿第二定律将润滑力再转化成加速度,实现冲击过程加速度的反演和准确测量,在超过imu球量程和采集频率的条件下,即imu碰撞时,依然可以获得其准确可靠的加速度数据,提高了大量程条件下的测试可靠性,同时使得冲击过程中采样数据光滑,能准确的描述整个冲击过程中惯性参数的变化特征。
技术特征:
1.一种基于润滑原理的imu冲击测量方法,其特征在于,
2.根据权利要求1所述的一种基于润滑原理的imu冲击测量方法,其特征在于,
3.根据权利要求2所述的一种基于润滑原理的imu冲击测量方法,其特征在于,
4.根据权利要求3所述的一种基于润滑原理的imu冲击测量方法,其特征在于,
5.根据权利要求4所述的一种基于润滑原理的imu冲击测量方法,其特征在于,
6.根据权利要求1所述的一种基于润滑原理的imu冲击测量方法,其特征在于,
技术总结
本发明公开了IMU冲击测量技术领域的一种基于润滑原理的IMU冲击测量方法,将IMU球完全浸入容器内的液体中,后施加冲击载荷,使得IMU球在容器内做冲击碰撞容器壁面的实验;选择IMU球在碰撞容器壁面前采集的,并由法向润滑力产生的加速度的实测数据,采用牛顿第二定律将加速度实测数据转化成IMU球在碰撞容器壁面前所受的润滑力,该润滑力为可信数据;根据法向润滑力模型推导出IMU球的加速度与IMU球到壁面的距离/IMU球半径之间关系的拟合模型;将可信的润滑力部分在拟合模型中进行插值,修正拟合公式中速度、润滑距离和位移的参数;通过修正后的拟合模型计算碰撞时刻的IMU球所受的力;通过牛顿第二定律将IMU球在碰撞时刻所受的力转化成碰撞时刻的加速度数据。
技术研发人员:安翼,张丽华,焦佳珺,吴强,陈雪冬
受保护的技术使用者:中国科学院力学研究所
技术研发日:
技术公布日:2024/5/6
- 还没有人留言评论。精彩留言会获得点赞!