无人机集群的纯方位无源定位方法、装置、设备及介质
本发明涉及无人机,尤其涉及一种无人机集群的纯方位无源定位方法、装置、设备及介质。
背景技术:
1、目前,无人机集群是一种新型的集群方式,在集群进行遂行编队飞行表演的时候,应该尽量减少向外发射电磁波,从而避免外界电磁场的干扰,即无人机在飞行时应尽可能保持电磁静默。当无人机飞行过程中位置发生偏差,可以采用纯方位无源定位的方法来调整无人机的队列位置,即选定无人机集群中的几架无人机来发射电磁波给集群中的其他无人机,被动接收信号的无人机可以从接收到的信号中提取出方向信息,通过方向信息得到自己的定位信息。纯方位无源定位减少了外界对无人机集群的干扰,也提高了无人机定位的准确性。
2、但是,现阶段的基于aoa的无源定位方法存在许多问题,如由于信号在传播过程中存在多径效应,即信号在传播过程中经历反射、折射等现象,导致信号到达时间和方向产生变化,使得信号到达接收站的路径不止一条,因此在实际应用中定位精度可能会受到限制。并且,无人机对目标进行跟踪时,需要实时进行多个相位的测量和信号处理;为了提高无人机机群编队效率、降低无人机机群移动能耗,需要进行基于aoa定位的多无人机的协同目标分配与航迹规划。现存方案用于解决多无人机基于aoa的定位计算复杂度较高、计算量较大,可能需要较多的计算资源。
3、因此,亟需一种无人机集群的纯方位无源定位方法,能够有效提高无人机定位的准确度,并降低无人机定位计算的复杂度。
技术实现思路
1、本发明的主要目的在于提供了一种无人机集群的纯方位无源定位方法、装置、设备及介质,旨在解决如何有效提高无人机定位的准确度,并降低无人机定位计算的复杂度的技术问题。
2、为实现上述目的,本发明提供了一种无人机集群的纯方位无源定位方法,所述方法包括以下步骤:
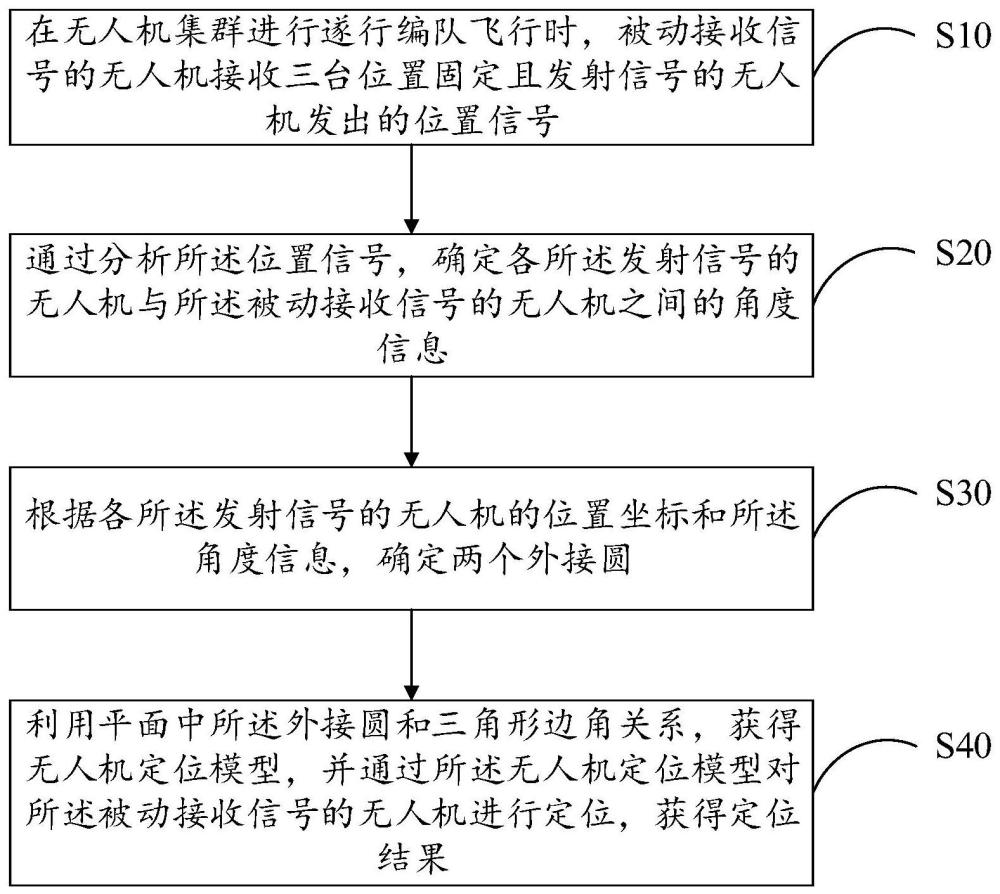
3、在无人机集群进行遂行编队飞行时,被动接收信号的无人机接收三台位置固定且发射信号的无人机发出的位置信号;
4、通过分析所述位置信号,确定各所述发射信号的无人机与所述被动接收信号的无人机之间的角度信息;
5、根据各所述发射信号的无人机的位置坐标和所述角度信息,确定两个外接圆,所述两个外接圆有两个交点,一个交点为一台所述发射信号的无人机的坐标,另一个交点为所述被动接收信号的无人机的坐标;
6、利用平面中所述外接圆和三角形边角关系,获得无人机定位模型,并通过所述无人机定位模型对所述被动接收信号的无人机进行定位,获得定位结果。
7、可选地,所述在无人机集群进行遂行编队飞行时,被动接收信号的无人机接收三台位置固定且发射信号的无人机发出的位置信号的步骤,包括:
8、在无人机集群进行遂行编队飞行时,选取三台位置固定且发射信号的无人机,所述三台位置固定且发射信号的无人机之间的位置关系为定点的三角形形状;
9、被动接收信号的无人机接收各所述发射信号的无人机发出的位置信号。
10、可选地,所述通过分析所述位置信号,确定各所述发射信号的无人机与所述被动接收信号的无人机之间的角度信息的步骤,包括:
11、假设三台所述发射信号的无人机的编号分别是a、b和c,所述被动接收信号的无人机的编号为d,无人机d的目标位置为o;
12、根据各所述发射信号的无人机与所述被动接收信号的无人机之间的角度信息建立极坐标系,所述极坐标系以无人机a为坐标原点,所述无人机a与无人机b之间的连线ab为所述极坐标系的极坐标正方向;
13、根据所述极坐标系分析所述位置信号,确定各所述发射信号的无人机与所述被动接收信号的无人机之间的角度信息。
14、可选地,所述根据所述极坐标系分析所述位置信号,确定各所述发射信号的无人机与所述被动接收信号的无人机之间的角度信息的步骤,包括:
15、根据所述极坐标系分析所述位置信号,获得所述目标位置o的极坐标为(r0,θ0),所述无人机d的极坐标为(ρ,θ'+θ0),所述无人机a的极坐标为(ra,θa),所述无人机b的极坐标为(rb,θb),无人机c的极坐标为(rc,θc);
16、根据各所述发射信号的无人机对应的极坐标与所述被动接收信号的无人机对应的极坐标,计算各所述发射信号的无人机与所述被动接收信号的无人机之间的角度信息;
17、假设∠adb=α,∠adc=β,则在δadb中,根据三角形余弦定理,获得α、β的余弦值;
18、在δdao中,根据三角形余弦定理获得∠dao的余弦值,所述∠dao的余弦值的计算公式为:
19、
20、将所述∠dao的余弦值的计算公式进行整理,获得ρ2-2ρ0ρcosθ′+ρ02-r2=0;
21、在δadb中,根据三角形正弦定理,获得
22、可选地,所述根据所述极坐标系分析所述位置信号,确定各所述发射信号的无人机与所述被动接收信号的无人机之间的角度信息的步骤之后,还包括:
23、过所述无人机d做ab的垂线交ab于点e,根据极坐标与正交直角坐标的关系,获得点e的直角坐标为(ρcos(θ′+θ0),ρsin(θ′+θ0));
24、根据所述点e的直角坐标,获得ae和de的长度;
25、在δbde中根据直角三角形的三边关系获得db的长度,所述db的长度的计算公式为:
26、
27、根据所述db的长度的计算公式,获得第一公式,所述第一公式为:
28、
29、在δacd中,根据三角形正弦定理,获得第二公式,所述第二公式为:
30、
31、可选地,所述在δadb中,根据三角形余弦定理,获得α、β的余弦值的步骤,包括:
32、在δadb中,根据根据三角形余弦定理,计算α、β的余弦值,所述计算α的余弦值公式和计算β的余弦值公式分别为:
33、
34、
35、相应地,所述在δadb中,根据三角形余弦定理,获得α、β的余弦值的步骤之后,还包括:
36、根据所述计算α的余弦值公式和所述计算β的余弦值公式进行整理,获得第三公式和第四公式;
37、所述第三公式为:
38、
39、所述第四公式为:
40、
41、可选地,所述利用平面中所述外接圆和三角形边角关系,获得无人机定位模型的步骤,包括:
42、基于平面中所述外接圆和三角形边角关系,根据所述第一公式、所述第二公式、所述第三公式和所述第四公司获得初始无人机定位模型,所述初始无人机定位模型为:
43、
44、对所述初始无人机定位模型进行整理,获得整理后的初始无人机定位模型,所述整理后的初始无人机定位模型为:
45、
46、以所述目标位置o为原点,ao为极坐标轴,建立新的极坐标系,获得无人机定位模型,所述无人机d的定位坐标为(r,θ),所述无人机定位模型为:
47、
48、此外,为实现上述目的,本发明还提出一种无人机集群的纯方位无源定位装置,所述装置包括:
49、信号接收模块,用于在无人机集群进行遂行编队飞行时,被动接收信号的无人机接收三台位置固定且发射信号的无人机发出的位置信号;
50、信号分析模块,用于通过分析所述位置信号,确定各所述发射信号的无人机与所述被动接收信号的无人机之间的角度信息;
51、数据确定模块,用于根据各所述发射信号的无人机的位置坐标和所述角度信息,确定两个外接圆,所述两个外接圆有两个交点,一个交点为一台所述发射信号的无人机的坐标,另一个交点为所述被动接收信号的无人机的坐标;
52、目标定位模块,用于利用平面中所述外接圆和三角形的几何关系,获得无人机定位模型,并通过所述无人机定位模型对所述被动接收信号的无人机进行定位,获得定位结果。
53、此外,为实现上述目的,本发明还提出一种无人机集群的纯方位无源定位设备,所述设备包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的无人机集群的纯方位无源定位程序,所述无人机集群的纯方位无源定位程序配置为实现如上文所述的无人机集群的纯方位无源定位方法的步骤。
54、此外,为实现上述目的,本发明还提出一种介质,所述介质上存储有无人机集群的纯方位无源定位程序,所述无人机集群的纯方位无源定位程序被处理器执行时实现如上文所述的无人机集群的纯方位无源定位方法的步骤。
55、本发明通过在无人机集群进行遂行编队飞行时,被动接收信号的无人机接收三台位置固定且发射信号的无人机发出的位置信号;通过分析所述位置信号,确定各所述发射信号的无人机与所述被动接收信号的无人机之间的角度信息;根据各所述发射信号的无人机的位置坐标和所述角度信息,确定两个外接圆,所述两个外接圆有两个交点,一个交点为一台所述发射信号的无人机的坐标,另一个交点为所述被动接收信号的无人机的坐标;利用平面中所述外接圆和三角形边角关系,获得无人机定位模型,并通过所述无人机定位模型对所述被动接收信号的无人机进行定位,获得定位结果。由于本发明无人机纯方位无源定位使得一个被动接收信号的无人机同时接收多个发射信号的无人机的位置信号,并根据发射信号的无人机与被动接收信号的无人机之间的角度信息相互印证,获得无人机定位模型,相比于现有技术,本发明能够有效提高无人机定位的准确度,并降低无人机定位计算的复杂度。
- 还没有人留言评论。精彩留言会获得点赞!