一种基于控制点权重的自主导航地图配准方法及设备与流程
本发明属于全球导航卫星系统,具体涉及一种基于控制点权重的自主导航地图配准方法及设备。
背景技术:
1、地面无人平台在应用中,自主导航地图发挥着关键的作用,自主导航地图能够在一定程度上辅助无人平台进行路径规划及决策,而地图的准确性以及地图与无人平台定位设备的匹配度直接影响无人平台自主机动的安全性、可靠性和效率。在实际应用中,存在通过自主导航地图下发路径,无人平台循迹行驶的应用场景,在该模式下,为了确保无人平台行驶的准确性和稳定性,需要下发的路径和车辆定位设备的定位信息匹配且精度满足自动驾驶需求。但在实际情况中,由于定位设备的硬件限制、校准和调试问题、地图存在偏差等情况导致实际通过导航地图下发的路径和无人平台的定位不匹配的问题,从而导致车辆未能按照下发的路径正确进行自主机动,为解决该问题,需要将地图数据与自主导航平台的定位设备进行配准,减少地图上的点位置与车辆定位设备下该点的位置误差,从而保证车辆能按照下发的路径正常行驶。目前用于无人平台自主导航地图的来源主要是遥感影像地图、无人机航拍地图等,这些地图和无人平台的定位信息存在一定误差,导致地图不能满足无人平台自主机动需求。
2、而目前现有的地图配准方法是通过选取控制点,基于控制点的变换关系对地图进行配准,由于该过程没有对控制点进行筛选,可能存在个别误差较大的控制点影响整个配准效果,导致地图仍旧不能满足无人平台自主使用需求。
技术实现思路
1、鉴于上述的分析,本发明旨在公开一种基于控制点权重的自主导航地图配准方法及设备,解决了现有技术中的地图进行配准方法没有对控制点进行筛选,从而影响配准效果的问题。
2、本发明的目的主要是通过以下技术方案实现的:
3、一方面,本发明公开了一种基于控制点权重的自主导航地图配准方法,包括:
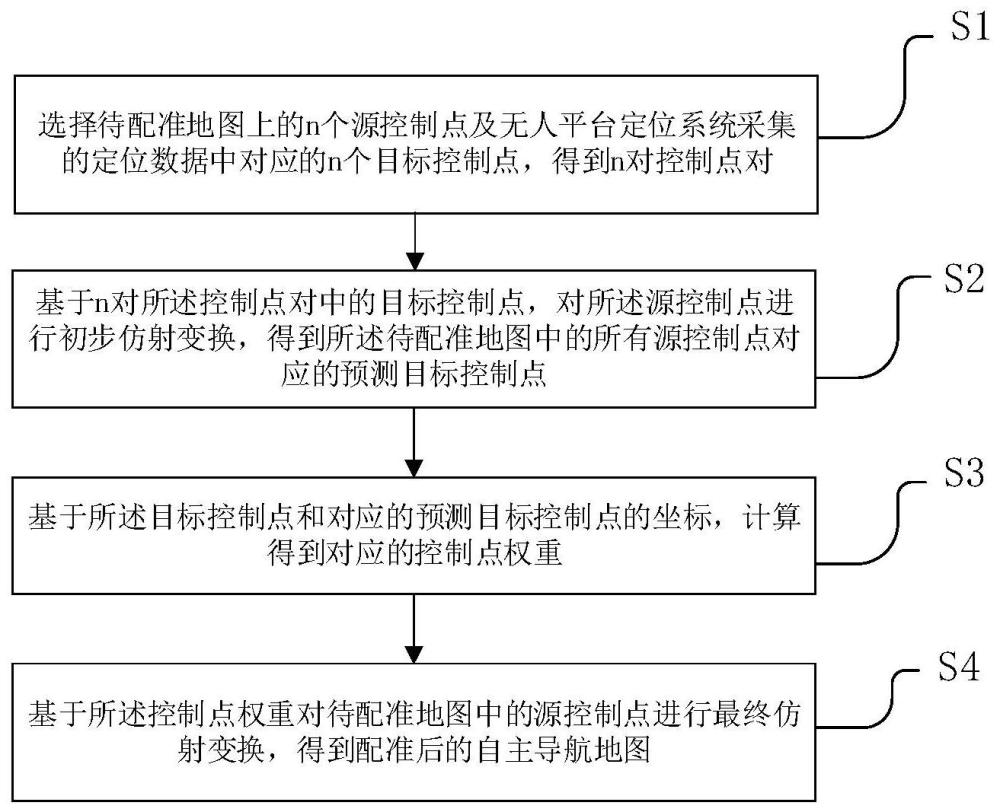
4、选择待配准地图上的n个源控制点及无人平台定位系统采集的定位数据中对应的n个目标控制点,得到n对控制点对;
5、基于n对所述控制点对中的所述目标控制点和源控制点进行初步仿射变换,得到所述待配准地图中的所有源控制点对应的预测目标控制点;
6、基于所述目标控制点和对应的预测目标控制点的坐标,计算得到对应的控制点权重;
7、基于所述控制点权重对待配准地图中的源控制点进行最终仿射变换,得到配准后的自主导航地图。
8、进一步的,通过下述方法得到所述待配准地图中的所有源控制点对应的预测目标控制点:
9、基于n对所述控制点对中的目标控制点,对对应的所述源控制点进行初步仿射变换,得到初级仿射变换参数;
10、基于所述初级仿射变换参数对所述源控制点进行变换,得到待配准地图中所有源控制点的预测目标控制点。
11、进一步的,所述基于所述目标控制点和预测目标控制点的坐标,计算得到对应的控制点权重,包括:
12、基于所述目标控制点和预测目标控制点的坐标,得到所述目标控制点和对应的预测目标控制点间的残差;
13、基于所述残差,设置对应的控制点权重。
14、进一步的,所述目标控制点和对应的预测目标控制点间的残差通过下述公式得到:
15、
16、其中,和为第i个源控制点对应的预测目标控制点坐标值,ei为第i个目标控制点和对应的预测目标控制点间的残差。
17、进一步的,通过下述公式得到对应的控制点权重:
18、
19、其中,wi为第i个控制点对对应的控制点权重,ei为第i个目标控制点和对应的预测目标控制点间的残差。
20、进一步的,在得到所述目标控制点和对应的预测目标控制点间的残差后,还包括:删除超出残差阈值的控制点对,以对控制点进行噪点去除。
21、进一步的,所述基于所述控制点权重对待配准地图中的源控制点进行最终仿射变换,得到配准后的自主导航地图,包括:
22、根据所述控制点权重建立各控制点对的变换关系;
23、基于各控制点对的坐标及所述变换关系,得到最终的变换参数;
24、基于最终的变换参数对所述源控制点进行变换,得到配准后的自主导航地图。
25、进一步的,各控制点对的所述变换关系表示为:
26、wi*xi'=wi*aw1xi+wi*aw2yi+wi*bw1;
27、wi*yi'=wi*aw3xi+wi*aw4yi+wi*bw2;
28、其中,aw1、aw2、bw1、aw3、aw4和bw2为最终的变换参数;(xi,yi)为第i个源控制点的坐标,(xi',yi')为第i个源控制点对应的目标控制点的坐标。
29、进一步的,根据所述变换关系得到如下变换矩阵,基于所述变换矩阵计算得到最终的所述变换参数:
30、
31、另一方面,还公开了一种计算机设备,包括至少一个处理器,以及至少一个与所述处理器通信连接的存储器;
32、所述存储器存储有可被所述处理器执行的指令,所述指令用于被所述处理器执行以实现前述的基于控制点权重的自主导航地图配准方法。
33、本发明至少可实现以下有益效果之一:
34、1.本发明所提出的基于控制点权重的自主导航地图配准方法,以无人平台定位信息为基准,对地图进行配准,使地图能够完全适配于无人平台,且本发明通过初步仿射变换求出各控制点对的残差,并通过残差值去除噪点,排除错误点或者误差较大的点对地图配准的影响,从而提高地图与无人平台的匹配度。
35、2、本发明基于控制点对的残差对控制点进行权重的分配,对于特征明显的残差较小的控制点赋予较高的权重,对特征不明显的容易引起较大残差的控制点赋予较低的权重,实现了增加可信度较高的点对变换过程的作用,降低可信度较低的点对整个变换过程的影响,提高配准精度。
技术特征:
1.一种基于控制点权重的自主导航地图配准方法,其特征在于,包括:
2.根据权利要求1所述的基于控制点权重的自主导航地图配准方法,其特征在于,通过下述方法得到所述待配准地图中的所有源控制点对应的预测目标控制点:
3.根据权利要求2所述的基于控制点权重的自主导航地图配准方法,其特征在于,所述基于所述目标控制点和预测目标控制点的坐标,计算得到对应的控制点权重,包括:
4.根据权利要求3所述的基于控制点权重的自主导航地图配准方法,其特征在于,所述目标控制点和对应的预测目标控制点间的残差通过下述公式得到:
5.根据权利要求3所述的基于控制点权重的自主导航地图配准方法,其特征在于,通过下述公式得到对应的控制点权重:
6.根据权利要求2所述的基于控制点权重的自主导航地图配准方法,其特征在于,在得到所述目标控制点和对应的预测目标控制点间的残差后,还包括:删除超出残差阈值的控制点对,以对控制点进行噪点去除。
7.根据权利要求2所述的基于控制点权重的自主导航地图配准方法,其特征在于,所述基于所述控制点权重对待配准地图中的源控制点进行最终仿射变换,得到配准后的自主导航地图,包括:
8.根据权利要求7所述的基于控制点权重的自主导航地图配准方法,其特征在于,各控制点对的所述变换关系表示为:
9.根据权利要求8所述的基于控制点权重的自主导航地图配准方法,其特征在于,根据所述变换关系得到如下变换矩阵,基于所述变换矩阵计算得到最终的所述变换参数:
10.一种计算机设备,其特征在于,包括至少一个处理器,以及至少一个与所述处理器通信连接的存储器;
技术总结
本发明涉及一种基于控制点权重的自主导航地图配准方法及设备;该方法包括:选择待配准地图上的n个源控制点及无人平台定位系统采集的定位数据中对应的n个目标控制点,得到n对控制点对;基于n对所述控制点对中的目标控制点,对所述源控制点进行初步仿射变换,得到所述待配准地图中的所有源控制点对应的预测目标控制点;基于所述目标控制点和对应的预测目标控制点的坐标,计算得到对应的控制点权重;基于所述控制点权重对待配准地图中的源控制点进行最终仿射变换,得到配准后的自主导航地图。本发明解决了现有技术中的地图进行配准方法没有对控制点进行筛选,且对特征明显的控制点和特征不明显的控制点赋予同样的权重样,从而影响配准效果的问题。
技术研发人员:杨婷婷,李兆冬,韩乐,安旭阳,宋威龙,余雪玮,周昌仪,杨雨,王一全,白晨青,银丹,海思媛
受保护的技术使用者:中兵智能创新研究院有限公司
技术研发日:
技术公布日:2024/3/31
- 还没有人留言评论。精彩留言会获得点赞!