巷道随掘变形监测方法与流程
本发明涉及采矿,尤其是涉及一种巷道随掘变形监测方法。
背景技术:
1、受掘进工作面空间所限,目前巷道矿压监测传感器均布置在掘进工作面后方。巷道变形主要集中在围岩揭露初期3小时内,因此及时获取随掘过程中的巷道变形情况对评价巷道围岩稳定性、优化巷道支护方案具有重要意义。
2、现有的掘进过程中,由于机组持续移动,且现场作业人员持续进行铺连网及锚杆支护作业,难以采用十字布点法等传统巷道变形测量方法。而且,在掘进工作面进行三维激光扫描后,粉尘严重阻碍激光在空气中的传播,以至采集的点云数据中有大量的粉尘噪点,激光扫描或激光雷达获取巷道形貌点云并实时计算巷道表面变形量的技术路径难以实现。
技术实现思路
1、本发明旨在至少在一定程度上解决相关技术中的技术问题之一。为此,本发明的实施例提出一种巷道随掘变形监测方法,通过双目视觉测量的原理,实现巷道表面变形情况的实时监测。
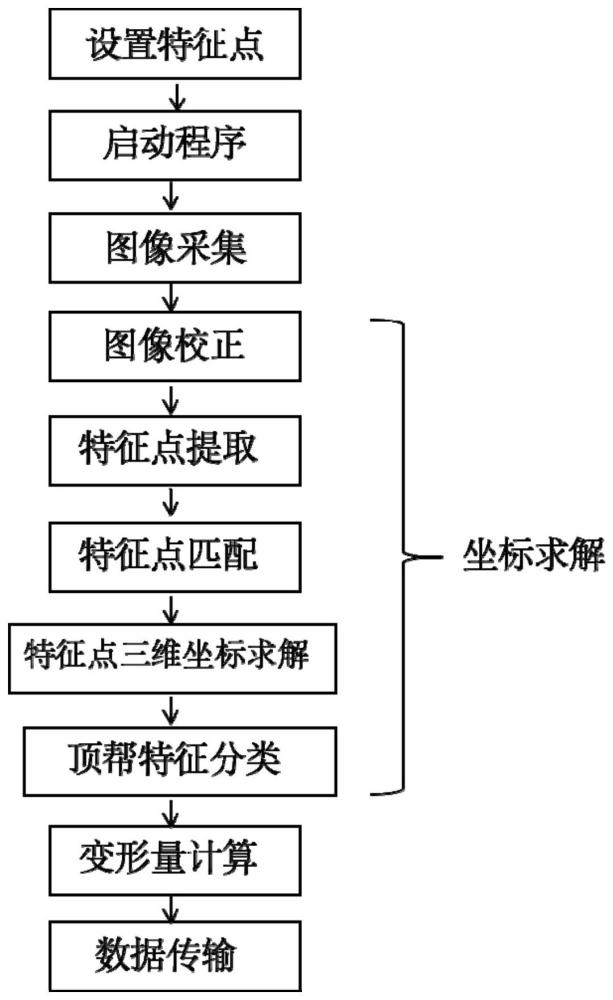
2、本发明实施例的巷道随掘变形监测方法,包括:
3、设置特征点:在巷道的左帮、右帮和顶板上分别设置至少一个特征点;
4、图像采集:通过变形监测双目相机从不同角度采集特征点的图像,且采集的图像中包括在巷道的左帮、右帮和顶板上分别设置的至少一个特征点;
5、坐标求解:根据变形监测双目相机采集的图像中特征点的视差,实时计算特征点在相机坐标系下的三维空间坐标;
6、变形量计算:根据特征点的三维空间坐标变化量,实时计算巷道表面变形情况。
7、本发明实施例的巷道随掘变形监测方法在巷道表面设置特征点,变形监测双目相机从不同位置对特征点进行拍摄,计算机实时采集相机的图像并进行视觉运算,利用双目视觉测量原理实现巷道表面变形的实时监测,并且监测过程中受粉尘的影响较低,可实现实时连续监测。
8、在一些实施例中,设置特征点步骤中:所述特征点为反光辅助特征点,多个所述相机包括用于补光的补光灯,所述反光辅助特征点能够反射所述补光灯发出的光线,以使多个所述相机采集到的图像中包括所述特征点的反射光;或者,所述特征点为发光辅助特征点,所述反光辅助特征点能够发出光线,以使多个所述相机采集到的图像中包括所述特征点的发射光。
9、在一些实施例中,设置特征点步骤中:所述特征点包括一个第一特征点、一个第二特征点和一个第三特征点,所述第一特征点设在巷道的顶板上,所述第二特征点设在巷道的左帮上,所述第三特征点设在巷道的与所述左帮相对的右帮上。
10、在一些实施例中,所述第二特征点和所述第三特征点在巷道的宽度方向上相对。
11、在一些实施例中,图像采集步骤中:所述变形监测双目相机包括在水平方向上间隔设置的第一相机和第二相机,所述第一相机临近巷道的左帮,所述第二相机临近巷道的右帮。
12、在一些实施例中,图像采集步骤中:所述变形监测双目相机为多组,多组所述变形监测双目相机从不同角度进行拍摄。
13、在一些实施例中,坐标求解步骤具体包括:
14、特征点提取:提取图像中的特征点,通过视觉识别算法,计算图像中的高亮圆形特征的二维质心坐标;
15、特征点三维坐标求解:根据预先标定的变形监测双目相机外参信息,利用三角测量原理,根据同一特征点在变形监测双目相机的不同相机中视差的不同,计算特征点在相机坐标系下的三维空间坐标;
16、顶帮特征分类:将实际求解的具有三维坐标的特征点进行分类,判断特征点在巷道的左帮、右帮或顶板。
17、在一些实施例中,坐标求解步骤中在特征点提取之前还包括:
18、图像校正,所述变形监测双目相机将采集的图像传输到计算机中,所述计算机获得图像源文件并进行格式转换,将图像信息转换为矩阵数据,所述计算机根据预先标定的畸变参数,将图像校正为无畸变图像;
19、特征点提取步骤中基于校正后的图像中的特征点进行提取。
20、在一些实施例中,特征点提取步骤之后还包括:特征点匹配,根据位置和形状特征对变形监测双目相机采集到的多幅图像中的特征点进行匹配,以保证匹配的特征点对应的是空间中同一个特征点。
21、在一些实施例中,变形量计算步骤中:将位于巷道左帮的特征点和右帮的特征点之间进行连线,位于巷道顶板的特征点到所述连线的垂直距离变化量作为顶板下沉量,将所述连线的长度变化量作为两帮移近量。
技术特征:
1.一种巷道随掘变形监测方法,其特征在于,包括:
2.根据权利要求1所述的巷道随掘变形监测方法,其特征在于,设置特征点步骤中:
3.根据权利要求1或2所述的巷道随掘变形监测方法,其特征在于,设置特征点步骤中:
4.根据权利要求3所述的巷道随掘变形监测方法,其特征在于,
5.根据权利要求1所述的巷道随掘变形监测方法,其特征在于,图像采集步骤中:
6.根据权利要求1所述的巷道随掘变形监测方法,其特征在于,图像采集步骤中:
7.根据权利要求1所述的巷道随掘变形监测方法,其特征在于,坐标求解步骤具体包括:
8.根据权利要求7所述的巷道随掘变形监测方法,其特征在于,坐标求解步骤中在特征点提取之前还包括:
9.根据权利要求7所述的巷道随掘变形监测方法,其特征在于,特征点提取步骤之后还包括:
10.根据权利要求1所述的巷道随掘变形监测方法,其特征在于,变形量计算步骤中:
技术总结
本发明公开了一种巷道随掘变形监测方法,包括:设置特征点:在巷道的左帮、右帮和顶板上分别设置至少一个特征点;图像采集:通过变形监测双目相机从不同角度采集特征点的图像;坐标求解:根据变形监测双目相机采集的图像中特征点的视差,实时计算特征点在相机坐标系下的三维空间坐标;变形量计算:根据特征点的三维空间坐标变化量,实时计算巷道表面变形情况。本发明的巷道随掘变形监测方法利用双目视觉测量原理实现巷道表面变形的实时监测,并且监测过程中受粉尘的影响较低,可实现实时连续监测。
技术研发人员:康红普,姜鹏飞,陈志良,王子越,罗超,何宗科,韦尧中,郭吉昌,刘畅,朱凯雄,李世林,张辉,李帅
受保护的技术使用者:中煤科工开采研究院有限公司
技术研发日:
技术公布日:2024/3/21
- 还没有人留言评论。精彩留言会获得点赞!