一种基于姿态机动的SAR卫星多条带拼接成像方法与流程
本发明涉及卫星多条带成像,具体涉及一种基于姿态机动的sar卫星多条带拼接成像方法。
背景技术:
1、小卫星因卫星重量轻,造价低而广泛应用。为降低小卫星因扫描幅宽窄,地面覆盖宽度不足等缺点,小卫星应用上对卫星多条带拼接成像需求日益凸显。小卫星惯量小,姿态切换响应快,采用大力矩输出的执行机构,可以实现10~30s内的敏捷机动,可以较好满足卫星多条带拼接成像的时间约束,实现卫星在同一轨道弧段内对多个目标成像进行拼接观测,极大发挥小卫星距离向成像效能,大幅提升载荷地面成像覆盖能力。
2、卫星多条带拼接需要卫星绕空间任意指向进行目标确定。采用通常欧拉角旋转方式描述卫星姿态,可能存在姿态奇异和解算的问题,卫星姿态转序设计也很难适应空间任意姿态之间的切换。
技术实现思路
1、本发明的目的是采用姿态四元数描述卫星姿态,通过目标姿态四元数描述姿态跟踪控制,避免因目标姿态随意性产生姿态控制转序的问题。
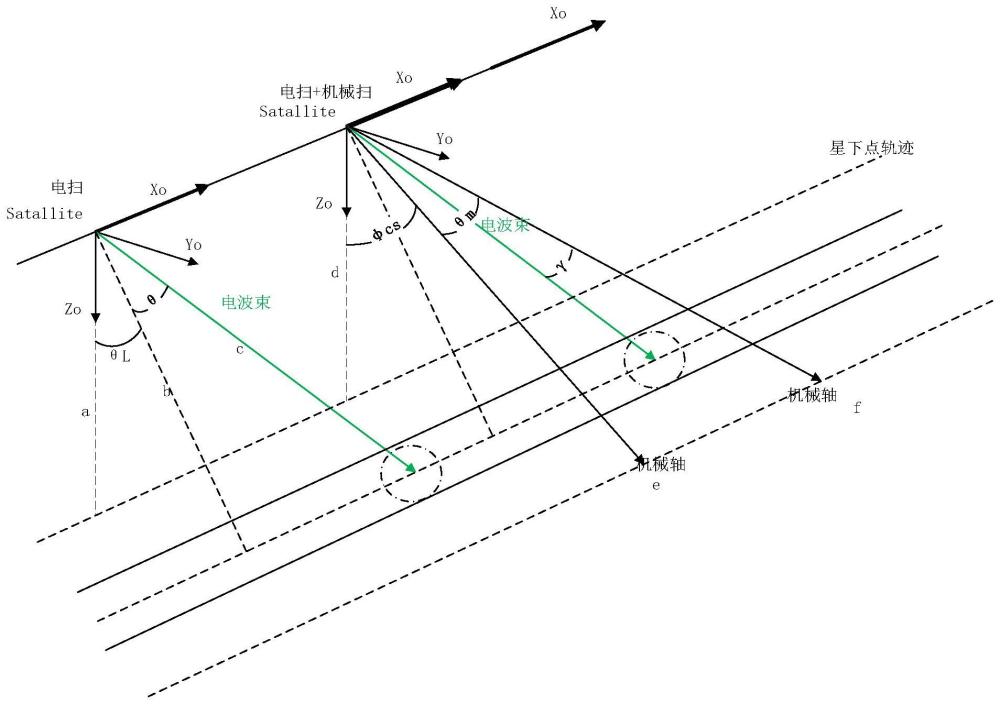
2、为了达到上述目的,本发明提供了一种基于姿态机动的sar卫星多条带拼接成像方法,在不同姿态下获取卫星成像的视角,包括侧视角成像视角θl和斜视角θ;
3、根据侧视角成像视角θl和斜视角θ计算卫星绕俯仰轴机动的转动角度θbm;
4、获取目标姿态角;
5、将目标姿态角转换为该姿态下的目标姿态四元数qmd。
6、可选地,在不同姿态下获取卫星成像的视角,所述姿态依次包括前视姿态、平飞和后视姿态。
7、可选地,计算转动角度θbm:
8、
9、可选地,目标姿态角包括:卫星滚动姿态角卫星俯仰姿态角θm,卫星偏航姿态角ψm;获取目标姿态角包括:按xb、yb、zb分别获取目标姿态为θm=θbm,ψm=0。
10、可选地,将目标姿态角转换为该姿态下的目标姿态四元数qmd;
11、
12、
13、
14、
15、其中,q1、q2、q3为描述卫星姿态的四元数表达,为姿态四元数的矢量的部分,表示四元数相乘。
16、本发明的有益效果为:
17、(1)本发明能够根据多条带拼接的成像时间和成像目标姿态序列,自动维护目标姿态四元数,过程明确,工程可实现性强。
18、(2)本发明以固定侧视状态,配合载荷电扫方式,有效解决仅靠卫星姿态机动获取目标指向的时间超限问题,从而保障了载荷成像对时间及指向的强约束要求,灵活性强。
技术特征:
1.一种基于姿态机动的sar卫星多条带拼接成像方法,其特征在于,在不同姿态下获取卫星成像的视角,包括侧视角成像视角θl和斜视角θ;
2.如权利要求1所述的基于姿态机动的sar卫星多条带拼接成像方法,其特征在于,在不同姿态下获取卫星成像的视角,所述姿态依次包括前视姿态、平飞和后视姿态。
3.如权利要求1所述的基于姿态机动的sar卫星多条带拼接成像方法,其特征在于,计算转动角度θbm:
4.如权利要求1所述的基于姿态机动的sar卫星多条带拼接成像方法,其特征在于,目标姿态角包括:卫星滚动姿态角卫星俯仰姿态角θm,卫星偏航姿态角ψm;获取目标姿态角包括:按xb、yb、zb分别获取目标姿态为θm=θbm,ψm=0。
5.如权利要求4所述的基于姿态机动的sar卫星多条带拼接成像方法,其特征在于,将目标姿态角转换为该姿态下的目标姿态四元数qmd;
技术总结
本发明公开了一种基于姿态机动的SAR卫星多条带拼接成像方法,在不同姿态下获取卫星成像的视角,包括侧视角成像视角θ<subgt;L</subgt;和斜视角θ;根据侧视角成像视角θ<subgt;L</subgt;和斜视角θ计算卫星绕俯仰轴机动的转动角度θ<subgt;bm</subgt;;获取目标姿态角;将目标姿态角转换为该姿态下的目标姿态四元数q<subgt;md</subgt;。本发明提供的方法采用姿态四元数描述卫星姿态,通过目标姿态四元数描述姿态跟踪控制,避免因目标姿态随意性产生姿态控制转序的问题。
技术研发人员:陈秀梅,刘德庆,裴甲瑞,胡文坤,薛欣,张增安,陈撼,郭思岩,钟金凤,邵若薇
受保护的技术使用者:上海航天控制技术研究所
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!