一种空气舵缝隙热环境地面试验模拟及测量方法与流程
本发明属于实验空气动力学,涉及一种飞行器模型空气舵缝隙高度确定方法及空气舵缝隙热环境地面试验模拟及测量方法,特别涉及高超声速风洞中飞行器模型空气舵缝隙高度确定方法及空气舵缝隙热环境地面试验模拟及测量方法。
背景技术:
1、空气舵是高速飞行器姿态控制应用最为广泛的控制方案。为使飞行器能改变舵偏角和容纳结构温升引起的热膨胀,空气舵与飞行器之间通常会预留一定缝隙。空气舵作为高超声速飞行器表面的凸起物,局部会存在复杂的激波与边界层干扰、激波与激波干扰、边界层分离与再附等复杂物理现象,使得局部气动加热异常复杂。舵缝隙结构的出现使得上游高速流体涌入缝隙内,缝隙附近表面将出现多条分离再附线,同时缝隙内部会产生涡结构,使得缝隙及空气舵干扰区热环境特性发生较大的改变,产生多条局部高热流带。这使得缝隙内上下壁面及舵轴附近容易出现较高的壁温,从而引发严重的烧蚀。国内外多个飞行试验项目在空气舵缝隙等部位出现了防热材料严重烧蚀、剥落现象,部分情况甚至导致了飞行试验失利。
2、影响缝隙流动的因素较多,除了受通常影响热环境的外形、马赫数、雷诺数等因素影响外。还对舵偏角、舵轴几何尺寸、层/湍流、边界层厚度、表面温度比tw/t0等具有高度的敏感性,使得目前缝内热环境的准确预测仍然是一个难点。虽然目前高速飞行器研制取得了一定进展,但由于缝隙流动的复杂性,使得空气舵缝隙及干扰区热环境预测问题仍未得到彻底解决。仍然依赖于防热设计安全余量保障,给防热与结构设计带来较大限制。该问题已成为制约高超声速机动飞行器方案进一步优化与飞行风险进一步降低的瓶颈。
3、由于受风洞尺寸及模拟能力的限制,气动热环境风洞试验多根据相似准则采用缩比模型,但是缝隙热环境对边界层厚度、流态、缝隙高度等因素高度敏感,而地面试验中难以实现对雷诺数及边界层厚度的完全模拟,目前对缝隙流动模拟相似参数的选取并没有形成统一的认识,尤其是在试验缩比模型空气舵缝隙高度的确定上,缺少相应判断准则。
技术实现思路
1、为了克服现有技术中的不足,本发明人进行了锐意研究,提供了一种空气舵缝隙热环境地面试验模拟及测量方法,由飞行条件及风洞模拟能力确定试验模型缩比及空气舵缝隙高度尺寸,并采用非接触面测量实现空气舵干扰区及缝隙内部上下表面热流的测量,利用整体式e型热电偶实现舵轴热流测量,以实现缝隙流动热环境的准确模拟。
2、本发明提供的技术方案如下:
3、第一方面,一种飞行器模型空气舵缝隙高度确定方法,包括:
4、根据飞行器的飞行高度及速度,确定飞行马赫数及飞行单位雷诺数;
5、根据飞行马赫数及地面风洞喷管出口尺寸,确定试验模型缩比;
6、根据飞行马赫数、飞行单位雷诺数、试验模型缩比及风洞模拟能力,确定地面风洞试验马赫数及风洞试验来流的单位雷诺数;
7、根据飞行马赫数、飞行单位雷诺数、风洞试验马赫数和风洞试验来流单位雷诺数,确定飞行条件及风洞试验条件下空气舵根弦舵尖处边界层厚度;
8、根据飞行条件及风洞试验条件下空气舵根弦舵尖处边界层厚度和单位雷诺数、真实飞行器的舵轴直径、真实舵缝高度、飞行器模型的舵轴直径和试验模型缩比,确定飞行器模型空气舵缝隙高度。
9、第二方面,一种飞行器模型空气舵缝隙高度确定装置,包括:
10、第一模块,用于根据飞行器的飞行高度及速度,确定飞行马赫数及飞行单位雷诺数;
11、第二模块,用于根据飞行马赫数及地面风洞喷管出口尺寸,确定试验模型缩比;
12、第三模块,用于根据飞行马赫数、飞行单位雷诺数、试验模型缩比及风洞模拟能力,确定地面风洞试验马赫数及风洞试验来流的单位雷诺数;
13、第四模块,用于根据飞行马赫数、飞行单位雷诺数、风洞试验马赫数和风洞试验来流单位雷诺数,确定飞行条件及风洞试验条件下空气舵根弦舵尖处边界层厚度;
14、第五模块,用于根据飞行条件及风洞试验条件下空气舵根弦舵尖处边界层厚度和单位雷诺数、真实飞行器的舵轴直径、真实舵缝高度、飞行器模型的舵轴直径和试验模型缩比,确定飞行器模型空气舵缝隙高度。
15、第三方面,一种飞行器模型空气舵缝隙高度确定设备,包括:
16、一个或多个处理器;
17、存储装置,用于存储一个或多个程序,
18、当所述一个或多个程序被所述一个或多个处理器执行,使得所述一个或多个处理器实施第一方面所述的一种飞行器模型空气舵缝隙高度测量方法。
19、第四方面,一种可读存储介质,其上存储有计算机程序,该程序被处理器执行时实施第一方面所述的一种飞行器模型空气舵缝隙高度测量方法。
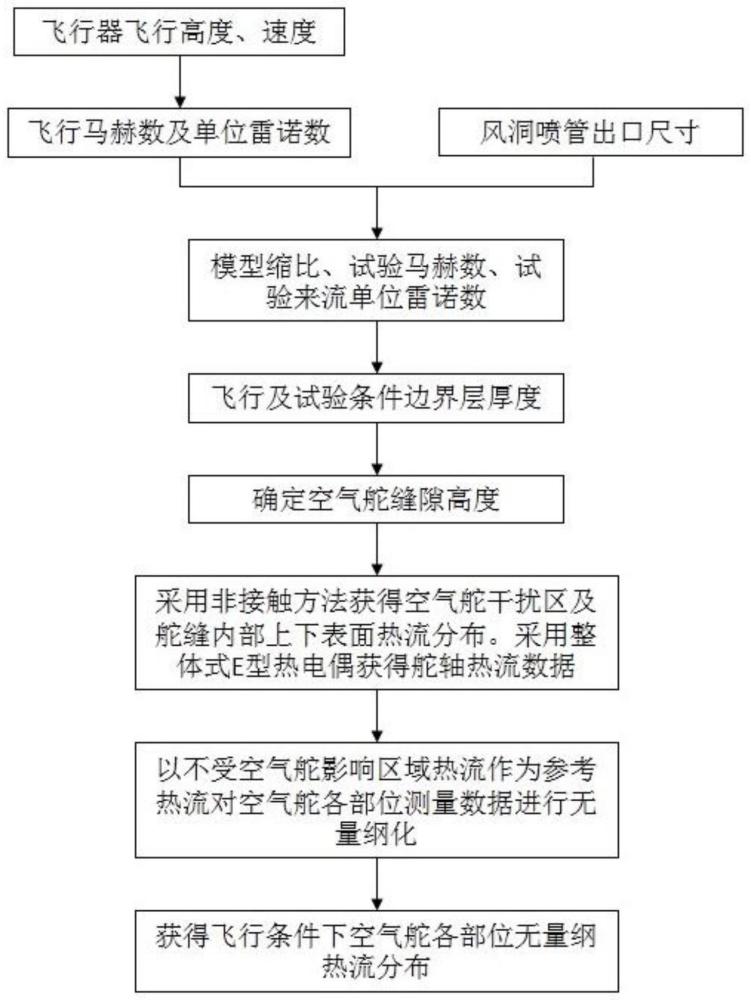
20、第五方面,一种空气舵缝隙热环境地面试验模拟及测量方法,包括:
21、根据飞行器的飞行高度及速度,确定飞行马赫数及飞行单位雷诺数;
22、根据飞行马赫数及地面风洞喷管出口尺寸,确定试验模型缩比;
23、根据飞行马赫数、飞行单位雷诺数、试验模型缩比及风洞模拟能力,确定地面风洞试验马赫数及风洞试验来流的单位雷诺数;
24、根据飞行马赫数、飞行单位雷诺数、风洞试验马赫数和风洞试验来流单位雷诺数,确定飞行条件及风洞试验条件下空气舵根弦舵尖处边界层厚度;
25、根据飞行条件及风洞试验条件下空气舵根弦舵尖处边界层厚度和单位雷诺数、真实飞行器的舵轴直径、真实舵缝高度、飞行器模型的舵轴直径和试验模型缩比,确定飞行器模型空气舵缝隙高度;
26、采用确定空气舵缝隙高度的飞行器模型,实施空气舵干扰区、缝隙内部上下表面及舵轴热流的测量。
27、根据本发明提供的一种空气舵缝隙热环境地面试验模拟及测量方法,具有以下有益效果:
28、本发明提供的一种空气舵缝隙热环境地面试验模拟及测量方法,由飞行条件及风洞模拟能力确定试验模型缩比及空气舵缝隙高度尺寸,并采用非接触面测量实现空气舵干扰区及缝隙内部上下表面热流的测量,利用整体式e型热电偶实现舵轴热流测量,以实现缝隙流动热环境的准确模拟。
技术特征:
1.一种飞行器模型空气舵缝隙高度确定方法,其特征在于,包括:
2.根据权利要求1所述的一种飞行器模型空气舵缝隙高度确定方法,其特征在于,所述根据飞行器的飞行高度及速度,确定飞行马赫数及飞行单位雷诺数的步骤,包括:根据飞行器的飞行高度通过查询标准大气表获得该高度下的空气密度和黏性,结合飞行器飞行速度,由公式确定飞行条件下的单位雷诺数,其中ρ为飞行高度处空气密度,v为飞行器飞行速度,μ为飞行高度处空气黏性系数。
3.根据权利要求1所述的一种飞行器模型空气舵缝隙高度确定方法,其特征在于,所述根据飞行器的飞行高度及速度,确定飞行马赫数及飞行单位雷诺数的步骤,包括:由公式确定飞行马赫数ma飞行状态,其中a为当地声速,由公式确定,其中γ=1.4,rg=287j/(kg.k),t为飞行高度处空气温度,采用热力学温标。
4.根据权利要求1所述的一种飞行器模型空气舵缝隙高度确定方法,其特征在于,所述确定地面风洞试验马赫数及风洞试验来流的单位雷诺数的步骤,包括:确定地面风洞试验马赫数与飞行马赫数相等;
5.根据权利要求1所述的一种飞行器模型空气舵缝隙高度确定方法,其特征在于,所述确定飞行条件下空气舵根弦舵尖处边界层厚度的步骤,包括:
6.根据权利要求1所述的一种飞行器模型空气舵缝隙高度测量方法,其特征在于,所述确定风洞试验条件下空气舵根弦舵尖处边界层厚度的步骤,包括:
7.根据权利要求1所述的一种飞行器模型空气舵缝隙高度确定方法,其特征在于,所述飞行器模型空气舵缝隙高度,通过下式确定:
8.一种空气舵缝隙热环境地面试验模拟及测量方法,其特征在于,包括:
9.根据权利要求8所述的一种空气舵缝隙热环境地面试验模拟及测量方法,其特征在于,所述空气舵缝内部上表面热流分布确定方法,包括:
10.根据权利要求8所述的一种空气舵缝隙热环境地面试验模拟及测量方法,其特征在于,所述空气舵缝内部下表面及干扰区热流分布确定方法,包括:
11.根据权利要求8所述的一种空气舵缝隙热环境地面试验模拟及测量方法,其特征在于,所述空气舵舵轴热流分布确定方法,包括:
12.根据权利要求8所述的一种空气舵缝隙热环境地面试验模拟及测量方法,其特征在于,还包括:将不受空气舵干扰的区域热流作为参考热流,由空气舵缝隙内部上下表面、干扰区及舵轴数据计算无量纲热流,获得高速飞行器空气舵缝隙、干扰区及舵轴处热流分布规律。
技术总结
本发明提供了一种空气舵缝隙热环境地面试验模拟及测量方法,包括根据飞行器的飞行高度及速度,确定飞行马赫数及飞行单位雷诺数;根据飞行马赫数及地面风洞喷管出口尺寸,确定试验模型缩比;根据飞行马赫数、飞行单位雷诺数、试验模型缩比及风洞模拟能力,确定地面风洞试验马赫数及风洞试验来流的单位雷诺数;根据飞行马赫数、飞行单位雷诺数、风洞试验马赫数和风洞试验来流单位雷诺数,确定飞行条件及风洞试验条件下空气舵根弦舵尖处边界层厚度;确定飞行条件及风洞试验条件下的边界层厚度后,确定飞行器模型空气舵缝隙高度;采用确定空气舵缝隙高度的飞行器模型,实施空气舵干扰区、缝隙内部上下表面及舵轴热流的测量。
技术研发人员:贾广森,金鑫,姚大鹏,纪锋,陈星,毕志献
受保护的技术使用者:中国航天空气动力技术研究院
技术研发日:
技术公布日:2024/4/24
- 还没有人留言评论。精彩留言会获得点赞!