一种多自由度测量辅助平台调姿控制方法及系统
本发明实施例涉及科学实验测试领域,尤其涉及一种多自由度测量辅助平台调姿控制方法及系统。
背景技术:
1、在科学实验测试领域,许多设备、装置、关键零部件、专有部件等均需要在复杂姿态下进行测试试验。但是,由于该需求属于新兴的技术需求,具有独创性,目前还没有一种多自由度辅助测量平台可以在结合实际需求和技术指标的客观前提下解决科学实验测试中复杂姿态变换测量的实际需求。
2、以上问题亟待解决。
技术实现思路
1、为解决相关技术问题,本发明提供一种多自由度测量辅助平台调姿控制方法及系统,来解决以上背景技术部分提到的问题。
2、为实现上述目的,本发明实施例采用如下技术方案:
3、第一方面,本发明实施例提供了一种多自由度测量辅助平台调姿控制方法,该方法,包括:
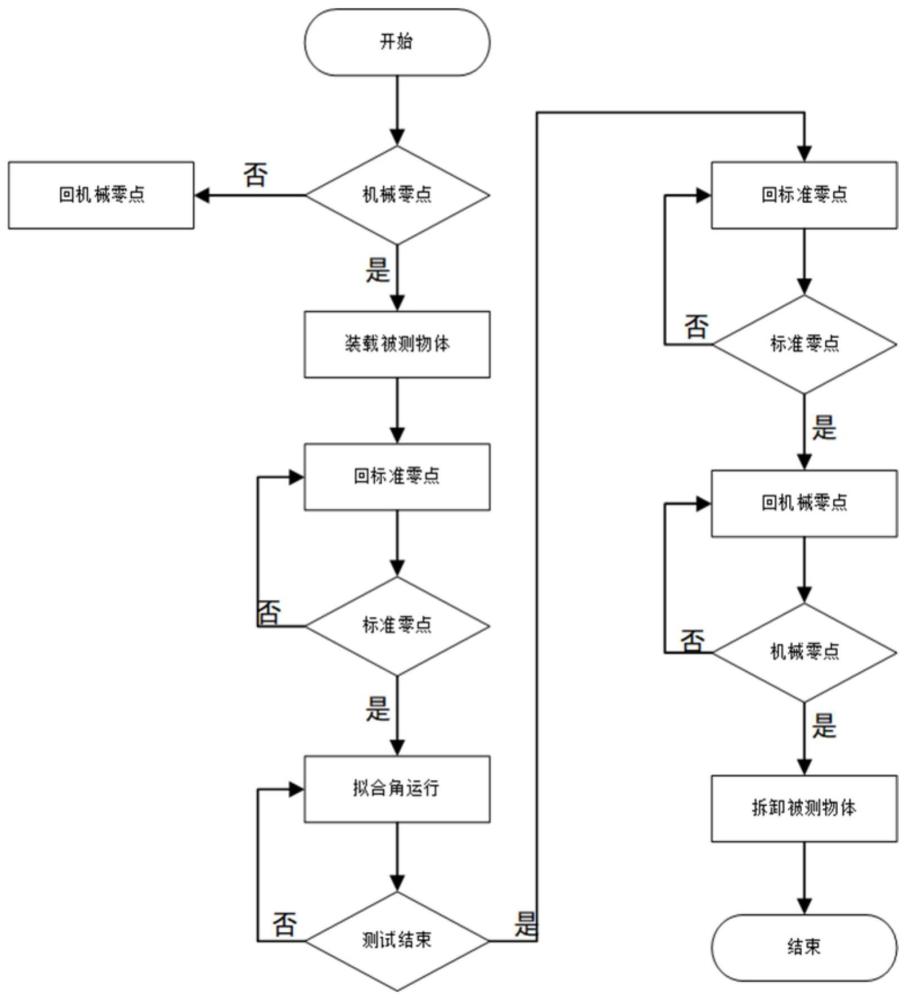
4、s101.控制设备运行到机械零点,将被测对象放置在所述设备上;
5、s102.控制所述设备运行到标准零点即姿态调整0°角位置;
6、s103.根据对所述被测对象测试要求,改变所述被测对象的滚转角、俯仰角、偏航角;其中,所述被测对象在任意角度场景下,所述设备的测试支撑点均在同一水平线上前后移动。
7、作为一种可选的实施方式,所述控制设备运行到机械零点,将被测对象放置在所述设备上,包括:
8、控制电机运行至设定位置,判断设备是否运行到机械零点,若所述判断结果为是,则将被测对象放置在所述设备上;其中,所述判断设备是否运行到机械零点包括:将外部旋转编码器与旋转自由度编码器做差,将拉绳传感器与提升和抬升编码器做差,将多自由度拟合角与倾角传感器做差,若各作差结果小于预设误差,则判定设备已运行到机械零点,否则判定设备未运行到机械零点。
9、作为一种可选的实施方式,所述控制设备运行到标准零点,包括:将外部旋转编码器与旋转自由度编码器做差,将拉绳传感器与提升和抬升编码器做差,将多自由度拟合角与倾角传感器做差,若各作差结果小于预设误差,则判定设备已运行到标准零点,否则判定设备未运行到标准零点。
10、作为一种可选的实施方式,所述设备的各轴时域同步,进行同步控制。
11、作为一种可选的实施方式,通过差值法判断所述同步控制是否出现偏差,其中,所述差值法包括:计算第一拉绳传感器与第二拉升传感器的差值,计算第一拉绳传感器与所述设备的第一轴编码器的差值,第二拉绳传感器与第二轴编码器的差值,若存在差值大于预设误差,则判定校验失败,判定所述同步控制出现偏差。
12、作为一种可选的实施方式,通过计算多自由度拟合各轴所需行程即速度确定多自由度拟合角。
13、作为一种可选的实施方式,所述多自由度按拟合角的校验包括:通过逆解拟合轴所需行程与传感器做差,指令拟合角和倾角传感器做差,若存在差值大于误差范围,则校验失败。
14、第二方面,本发明实施例提供了一种多自由度测量辅助平台调姿控制系统,该系统采用上述第一方面任一项所述的多自由度测量辅助平台调姿控制方法,包括:
15、位置传感器,用于限制运行范围;
16、旋转编码器,用于旋转姿态角的闭环控制;
17、拉绳传感器,用于提升和抬升位置的闭环控制;
18、倾角传感器,用于多自由速拟合角闭环控制;
19、上位机系统,用于用户操作及外部数据采集系统数据处理。
20、作为一种可选的实施方式,所述多自由度测量辅助平台调姿控制系统还包括中央控制器;所述中央控制器用于处理该系统的运动参数。
21、作为一种可选的实施方式,所述多自由度测量辅助平台调姿控制系统使用场景分为控制室使用场景和现场模型安装或调试使用场景。
22、本发明实施例提出的技术方案中被测对象在任意角度场景下,所述设备的测试支撑点均在同一水平线上前后移动,在一个平台上实现了旋转角、俯仰角、偏航角等多种姿态角度的变化,有利于测量模型的多姿态变换,满足科学实验测试中复杂姿态变换测量的实际需求。
技术特征:
1.一种多自由度测量辅助平台调姿控制方法,其特征在于,包括:
2.根据权利要求1所述的多自由度测量辅助平台调姿控制方法,其特征在于,所述控制设备运行到机械零点,将被测对象放置在所述设备上,包括:
3.根据权利要求1所述的多自由度测量辅助平台调姿控制方法,其特征在于,所述控制设备运行到标准零点,包括:将外部旋转编码器与旋转自由度编码器做差,将拉绳传感器与提升和抬升编码器做差,将多自由度拟合角与倾角传感器做差,若各作差结果小于预设误差,则判定设备已运行到标准零点,否则判定设备未运行到标准零点。
4.根据权利要求3所述的多自由度测量辅助平台调姿控制方法,其特征在于,所述设备的各轴时域同步,进行同步控制。
5.根据权利要求4所述的多自由度测量辅助平台调姿控制方法,其特征在于,通过差值法判断所述同步控制是否出现偏差,其中,所述差值法包括:计算第一拉绳传感器与第二拉升传感器的差值,计算第一拉绳传感器与所述设备的第一轴编码器的差值,第二拉绳传感器与第二轴编码器的差值,若存在差值大于预设误差,则判定校验失败,判定所述同步控制出现偏差。
6.根据权利要求5所述的多自由度测量辅助平台调姿控制方法,其特征在于,通过计算多自由度拟合各轴所需行程即速度确定多自由度拟合角。
7.根据权利要求6所述的多自由度测量辅助平台调姿控制方法,其特征在于,所述多自由度按拟合角的校验包括:通过逆解拟合轴所需行程与传感器做差,指令拟合角和倾角传感器做差,若存在差值大于误差范围,则校验失败。
8.一种多自由度测量辅助平台调姿控制系统,其特征在于,该系统采用上述权利要求1至7任一项所述的多自由度测量辅助平台调姿控制方法,包括:
9.根据权利要求8所述的多自由度测量辅助平台调姿控制系统,其特征在于,还包括中央控制器;所述中央控制器用于处理该系统的运动参数。
10.根据权利要求9所述的多自由度测量辅助平台调姿控制系统,其特征在于,该系统使用场景分为控制室使用场景和现场模型安装或调试使用场景。
技术总结
本发明实施例公开一种多自由度测量辅助平台调姿控制方法及系统,该方法包括:控制设备运行到机械零点,将被测对象放置在所述设备上;控制所述设备运行到标准零点;根据对所述被测对象测试要求,改变所述被测对象的滚转角、俯仰角、偏航角。本发明中被测对象在任意角度场景下,测试支撑点均在同一水平线上前后移动,在一个平台上实现了多种姿态角度的变化,有利于测量模型的多姿态变换,满足科学实验测试中复杂姿态变换测量的实际需求。
技术研发人员:叶松涛,孙政,周浪,王立成,严思杰
受保护的技术使用者:华中科技大学无锡研究院
技术研发日:
技术公布日:2024/4/8
- 还没有人留言评论。精彩留言会获得点赞!