一种高精度的手柄力标定机构的制作方法
本技术涉及机械制造,具体涉及一种高精度的手柄力标定机构。
背景技术:
1、现有的手柄力标定设备是通过四个方向伸出弹片将手柄锁止于中心位置,然后沿着手柄的拨动方向,通过机械手来实现移动,同时锁止机构与机械手之间由力传感器连接,手柄被拨动时的反作用力数值会在力传感器上得到反馈,从而对手柄进行力大小的标定,手柄拨动的一定角度的同时,会产生一个力的曲线。
2、机械上的配合间隙对于夹爪夹紧产品时会产生一定的误差,并在拨动手柄的角度都不是十分的精准,并且对手柄的a面经常伴有划伤的风险。夹紧手柄的同时会对其产生一定的偏移,而且不可控。因此由于现有的手柄力标定设备的结构复杂,会导致被测产品的测试精度不准确。
3、由此可见,如何提高被测产品的测试精度为本领域需解决的问题。
技术实现思路
1、针对于现有手柄力标定设备存在因结构复杂而导致测试精准度不高的技术问题,本方案的目的在于提供一种高精度的手柄力标定机构,其内部结构简单,能够保证被测产品的测试精度,很好地克服了现有技术所存在的问题。
2、为了达到上述目的,本实用新型提供的一种高精度的手柄力标定机构,包括底座,驱动件,锁止件,定位环以及套筒;所述锁止件设置于底座两侧并对设置于底座上的被测试品进行锁止;所述驱动件驱动连接测试手柄;所述定位环设置于测试手柄上并与套筒定位连接,通过套筒构成测试手柄标定时的定位结构。
3、进一步地,所述底座底部配合设有第一传感器;所述第一传感器与锁止件进行控制连接,通过感应底座上的被测产品来控制锁止件的工作状态。
4、进一步地,所述套筒配合设有用于感应套筒相对于测试手柄位置的第二传感器。
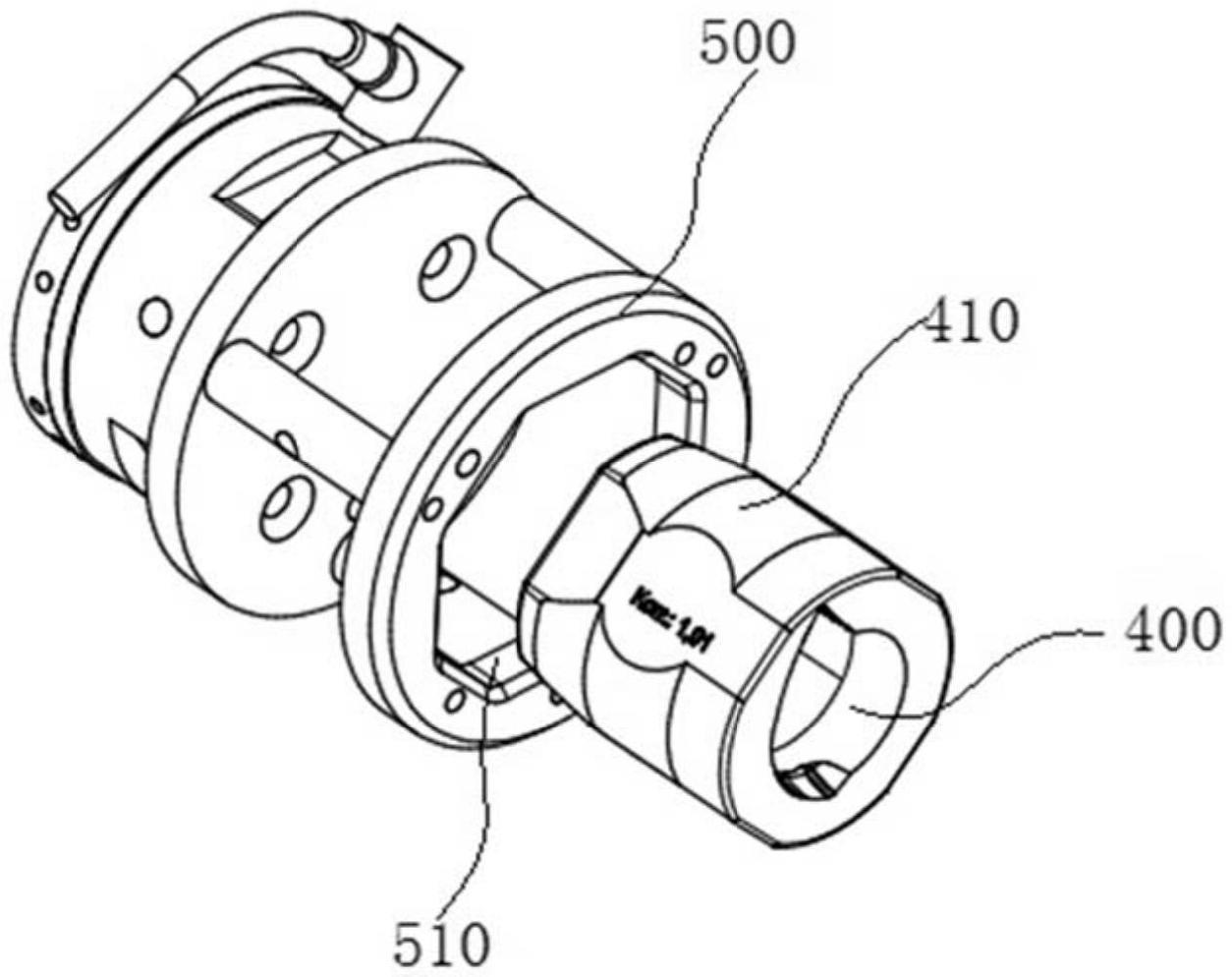
5、进一步地,所述套筒外壁设有四个相互垂直的凸起球面。
6、进一步地,所述定位环内壁为对称的多边形结构;所述定位环内壁设有与套筒外壁凸起球面相适配的四个工作面。
7、进一步地,所述四个工作面相互垂直设置。
8、本方案提供的高精度的手柄力标定机构,其力标定部分采用两个部件通过精确定位连接,结构简单,进而保证了被测产品的测试精度。
技术特征:
1.一种高精度的手柄力标定机构,其特征在于,包括底座,驱动件,锁止件,定位环以及套筒;所述锁止件设置于底座两侧并对设置于底座上的被测试品进行锁止;所述驱动件驱动连接测试手柄;所述定位环设置于测试手柄上并与套筒定位连接,通过套筒构成测试手柄标定时的定位结构。
2.根据权利要求1所述的一种高精度的手柄力标定机构,其特征在于,所述底座底部配合设有第一传感器;所述第一传感器与锁止件进行控制连接,通过感应底座上的被测产品来控制锁止件的工作状态。
3.根据权利要求1所述的一种高精度的手柄力标定机构,其特征在于,所述套筒配合设有用于感应套筒相对于测试手柄位置的第二传感器。
4.根据权利要求1所述的一种高精度的手柄力标定机构,其特征在于,所述套筒外壁设有四个相互垂直的凸起球面。
5.根据权利要求1所述的一种高精度的手柄力标定机构,其特征在于,所述定位环内壁为对称的多边形结构;所述定位环内壁设有与套筒外壁凸起球面相适配的四个工作面。
6.根据权利要求5所述的一种高精度的手柄力标定机构,其特征在于,所述四个工作面相互垂直设置。
技术总结
本技术公开了一种高精度的手柄力标定机构,包括底座,驱动件,锁止件,定位环以及套筒;所述锁止件设置于底座两侧并对设置于底座上的被测试品进行锁止;所述驱动件驱动连接测试手柄;所述定位环设置于测试手柄上并与套筒定位连接,通过套筒构成测试手柄标定时的定位结构。本方案的力标定部分采用两个部件通过精确定位连接,结构简单,进而保证了被测产品的测试精度。
技术研发人员:陆云,吴广锋,阎卓
受保护的技术使用者:科世达(上海)智能设备有限公司
技术研发日:20230109
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!