辅助驾驶标定系统的制作方法
本申请涉及车辆,具体涉及一种辅助驾驶标定系统。
背景技术:
1、本部分提供的仅仅是与本公开相关的背景信息,其并不必然是现有技术。
2、传统车辆设置的感应传感器数量相对较少,因此,用于标定传统车辆的感应传感器的标定系统通常采用简单的龙门架结构作为安装感应传感器标靶的基础结构,然后再将龙门架结构、感应传感器标靶与车辆的四轮定位机构集成在一起,能够满足对车辆的感应传感器进行标定的基本需求。
3、但是,随着新能源车的智能化程度的快速提升,与智能化相关的感应传感器在新能源车上的配置数量也越来越多,对相应的标定系统的标靶数量需求也是日益增多,同时,对相应的标定系统的标定精度要求也随之提升。而且,由于不同车型的传感器数量和位置不同,对标定系统的多个标靶的多个位置和多个角度要求也不同,而现有的龙门架结构由于调整灵活性较差,导致传统的标定系统已经不能满足智能驾驶辅助系统的标定需求。
技术实现思路
1、本申请的目的是至少解决现有的辅助驾驶标定系统调节灵活度差以及适应能力差的技术问题,该目的是通过以下技术方案实现的:
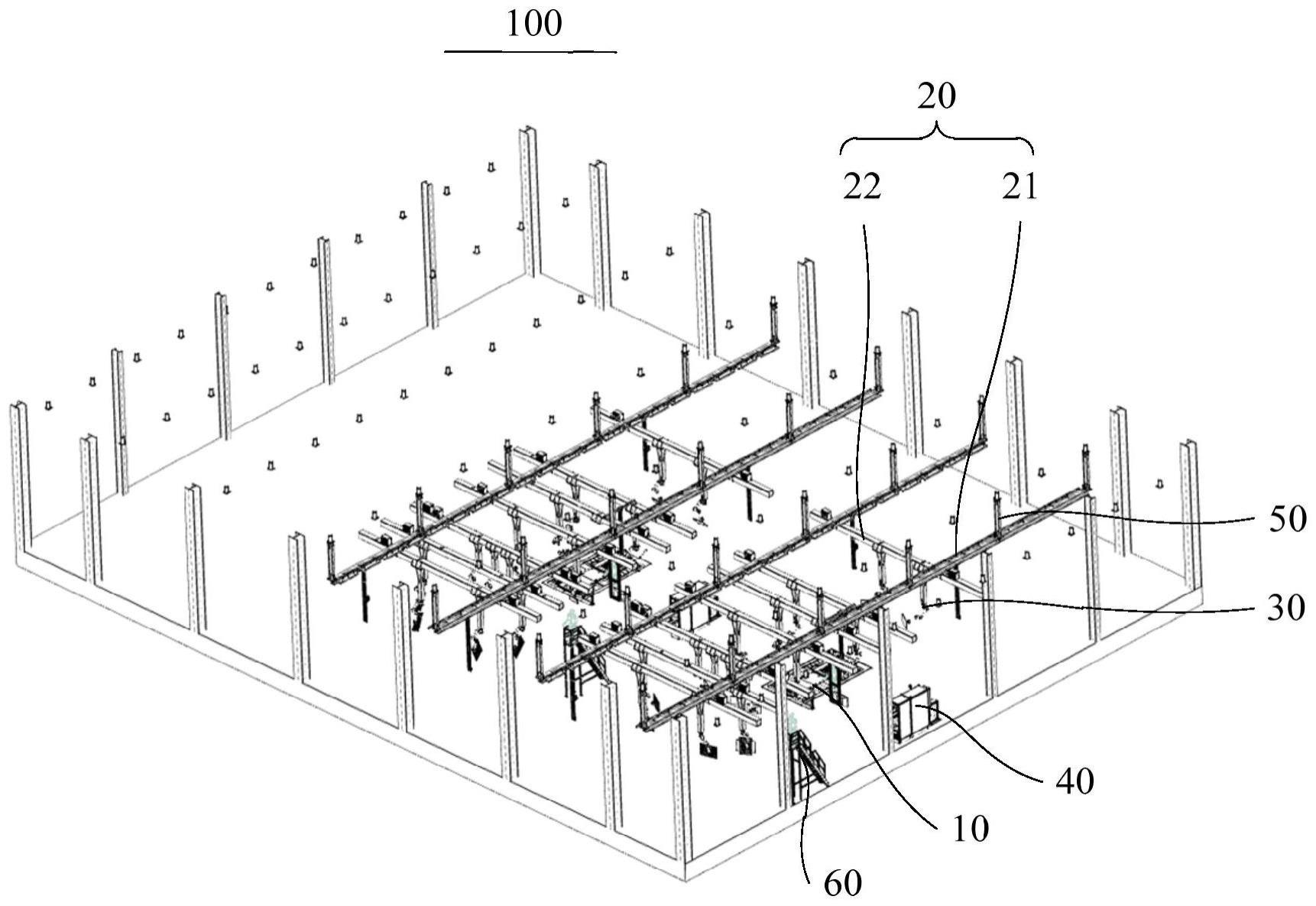
2、本申请的第一方面提供了一种辅助驾驶标定系统,辅助驾驶标定系统包括:车辆对中机构,车辆对中机构设置有车辆定位区;与车辆定位区配合的标靶悬挂架,包括沿车辆的行进方向延伸的纵向滑轨组件以及纵向可滑动地设置于纵向滑轨组件的横梁组件;设置于横梁组件的多个标靶机构,标靶机构包括设置于横梁组件的悬挂立柱以及设置于悬挂立柱的标靶机器人;控制装置,控制装置设置为与横梁组件和多个标靶机构通信连接,用于通过驱动横梁组件和多个标靶机构调节辅助驾驶标定系统的多个标靶。
3、本领域技术人员能够理解的是,本申请的辅助驾驶标定系统提出了可滑动的横梁组件与设置于横梁组件的多个标靶机器人配合来调节标靶的位置和角度,以此提高辅助驾驶标定系统的多个标靶的调节灵活性以及对于多种不同辅助驾驶系统的适应能力。
4、具体地,多个标靶机器人通过多个悬挂立柱设置于横梁组件,横梁组件则是可纵向滑动地设置于纵向滑轨组件,多个标靶机器人为辅助驾驶标定系统提供了多个标靶,且标靶机器人能够调整多个标靶的具体角度,横梁组件沿纵向滑轨组件滑动的过程中可以调整多个标靶的距离,以此满足辅助驾驶标定系统对多个标靶的需求,以及提高多个标靶的调节灵活性,提高辅助驾驶标定系统对多种标定需求的适应能力。
5、在一些实施例中,纵向滑轨组件包括分布于车辆对中机构的两侧的两个纵向滑轨,横梁组件包括沿两个纵向滑轨的纵向延伸方向间隔分布的多个横梁以及驱动横梁沿纵向滑动的第一驱动装置。
6、在一些实施例中,第一驱动装置包括第一电机、齿轮和齿条,第一电机设置于纵向滑轨并与控制装置通信连接,齿轮与第一电机的旋转轴连接,齿条沿纵向设置于横梁的底部并与齿轮啮合。
7、在一些实施例中,多个悬挂立柱横向可滑动地设置于横梁组件,和/或多个悬挂立柱可拆卸地设置于横梁组件。
8、在一些实施例中,辅助驾驶标定系统还包括设置于横梁组件并驱动悬挂立柱沿横向滑动的第二驱动装置,和/或多个悬挂立柱通过安装板可拆卸地设置于横梁组件。
9、在一些实施例中,第二驱动装置包括第二电机、丝杠和丝杠滑块,第二电机设置于横梁组件的端部并与控制装置通信连接,丝杠的一端与第二电机的旋转轴相连,丝杠滑块套设于丝杠并与悬挂立柱连接。
10、在一些实施例中,标靶机器人包括设置于悬挂立柱的机械臂以及设置于机械臂的标靶,机械臂具有转动角度可调节的至少一个机械关节。
11、在一些实施例中,标靶机器人还包括与控制装置通信连接的双目相机,双目相机设置于机械臂的侧方,用于拍摄标靶的图像并将拍摄的图像发送到控制装置,控制装置根据图像控制机械关节的转动角度。
12、在一些实施例中,标靶悬挂架还包括基础支撑结构,基础支撑结构设置于纵向滑轨组件的顶部用于悬挂并支撑纵向滑轨组件。
13、在一些实施例中,基础支撑结构包括多个支撑柱和多个连接绳,多个支撑柱沿纵向滑轨组件的分布方向间隔设置,多个支撑柱与纵向滑轨组件之间通过多个连接绳连接。
技术特征:
1.一种辅助驾驶标定系统,其特征在于,所述辅助驾驶标定系统包括:
2.根据权利要求1所述的辅助驾驶标定系统,其特征在于,所述纵向滑轨组件包括分布于所述车辆对中机构的两侧的两个纵向滑轨,所述横梁组件包括沿两个所述纵向滑轨的纵向延伸方向间隔分布的多个横梁以及驱动所述横梁沿纵向滑动的第一驱动装置。
3.根据权利要求2所述的辅助驾驶标定系统,其特征在于,所述第一驱动装置包括第一电机、齿轮和齿条,所述第一电机设置于所述纵向滑轨并与所述控制装置通信连接,所述齿轮与所述第一电机的旋转轴连接,所述齿条沿纵向设置于所述横梁的底部并与所述齿轮啮合。
4.根据权利要求1所述的辅助驾驶标定系统,其特征在于,多个所述悬挂立柱横向可滑动地设置于所述横梁组件,和/或多个所述悬挂立柱可拆卸地设置于所述横梁组件。
5.根据权利要求4所述的辅助驾驶标定系统,其特征在于,所述辅助驾驶标定系统还包括设置于所述横梁组件并驱动所述悬挂立柱沿横向滑动的第二驱动装置,和/或多个所述悬挂立柱通过安装板可拆卸地设置于所述横梁组件。
6.根据权利要求5所述的辅助驾驶标定系统,其特征在于,所述第二驱动装置包括第二电机、丝杠和丝杠滑块,所述第二电机设置于所述横梁组件的端部并与所述控制装置通信连接,所述丝杠的一端与所述第二电机的旋转轴相连,所述丝杠滑块套设于所述丝杠并与所述悬挂立柱连接。
7.根据权利要求1所述的辅助驾驶标定系统,其特征在于,所述标靶机器人包括设置于所述悬挂立柱的机械臂以及设置于所述机械臂的标靶,所述机械臂具有转动角度可调节的至少一个机械关节。
8.根据权利要求7所述的辅助驾驶标定系统,其特征在于,所述标靶机器人还包括与所述控制装置通信连接的双目相机,所述双目相机设置于所述机械臂的侧方,用于拍摄所述标靶的图像并将拍摄的所述图像发送到所述控制装置,所述控制装置根据所述图像控制所述机械关节的转动角度。
9.根据权利要求1所述的辅助驾驶标定系统,其特征在于,所述标靶悬挂架还包括基础支撑结构,所述基础支撑结构设置于所述纵向滑轨组件的顶部用于悬挂并支撑所述纵向滑轨组件。
10.根据权利要求9所述的辅助驾驶标定系统,其特征在于,所述基础支撑结构包括多个支撑柱和多个连接绳,多个所述支撑柱沿所述纵向滑轨组件的分布方向间隔设置,多个所述支撑柱与所述纵向滑轨组件之间通过多个所述连接绳连接。
技术总结
本申请的辅助驾驶标定系统包括:车辆对中机构,车辆对中机构设置有车辆定位区;与车辆定位区配合的标靶悬挂架,包括沿车辆的行进方向延伸的纵向滑轨组件以及纵向可滑动地设置于纵向滑轨组件的横梁组件;设置于横梁组件的多个标靶机构,标靶机构包括设置于横梁组件的悬挂立柱以及设置于悬挂立柱的标靶机器人;控制装置,控制装置设置为与横梁组件和多个标靶机构通信连接,用于通过驱动横梁组件和多个标靶机构调节辅助驾驶标定系统的多个标靶。本申请提出了通过可滑动的横梁组件与多个标靶机器人配合来调节辅助驾驶标定系统的多个标靶,以此提高辅助驾驶标定系统的多个标靶的位置调节灵活性以及对于多种不同辅助驾驶系统的适应能力。
技术研发人员:王红蒲,冯俊,方明,徐华,张钧剑
受保护的技术使用者:上海集度汽车有限公司
技术研发日:20230209
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!