一种六维力传感器简易标定装置的制作方法
本技术属于传感器标定领域,具体涉及一种六维力传感器简易标定装置。
背景技术:
1、六维力传感器是一种常用于机器人手臂上的传感器,它能够同时测量三个轴向力和三个轴向力矩,即:fx,fy,fz,mx,my和mz。近年来,六维力传感器应用于许多行业,如机械制造、航天航空、交通出行、医学等领域,尤其在机器人领域,在这些领域,六维力传感器发挥着重要作用。
2、目前我国已经研制出工业机器人用六维力传感器并将逐步形成系列化产品。
3、由于设计和制造等原因不可避免地存在测量误差,且各输出通道之间存在着相互耦合和干扰,为有效提高测量力和力矩的精度,很大程度上取决于标定的方法。然而,现有的六维力传感器的标定设备往往造价高昂,这在很大程度上限制了六维力传感器的推广应用。
4、因此,如何提供一种六维力传感器简易标定装置,便于六维力传感的测量标定,成为本领域技术人员需要解决的问题。
技术实现思路
1、有鉴于此,本实用新型提供了一种六维力传感器简易标定装置,本实用新型通过成本低廉、便捷易用,能够实现六维力传感器的快速标定校准。
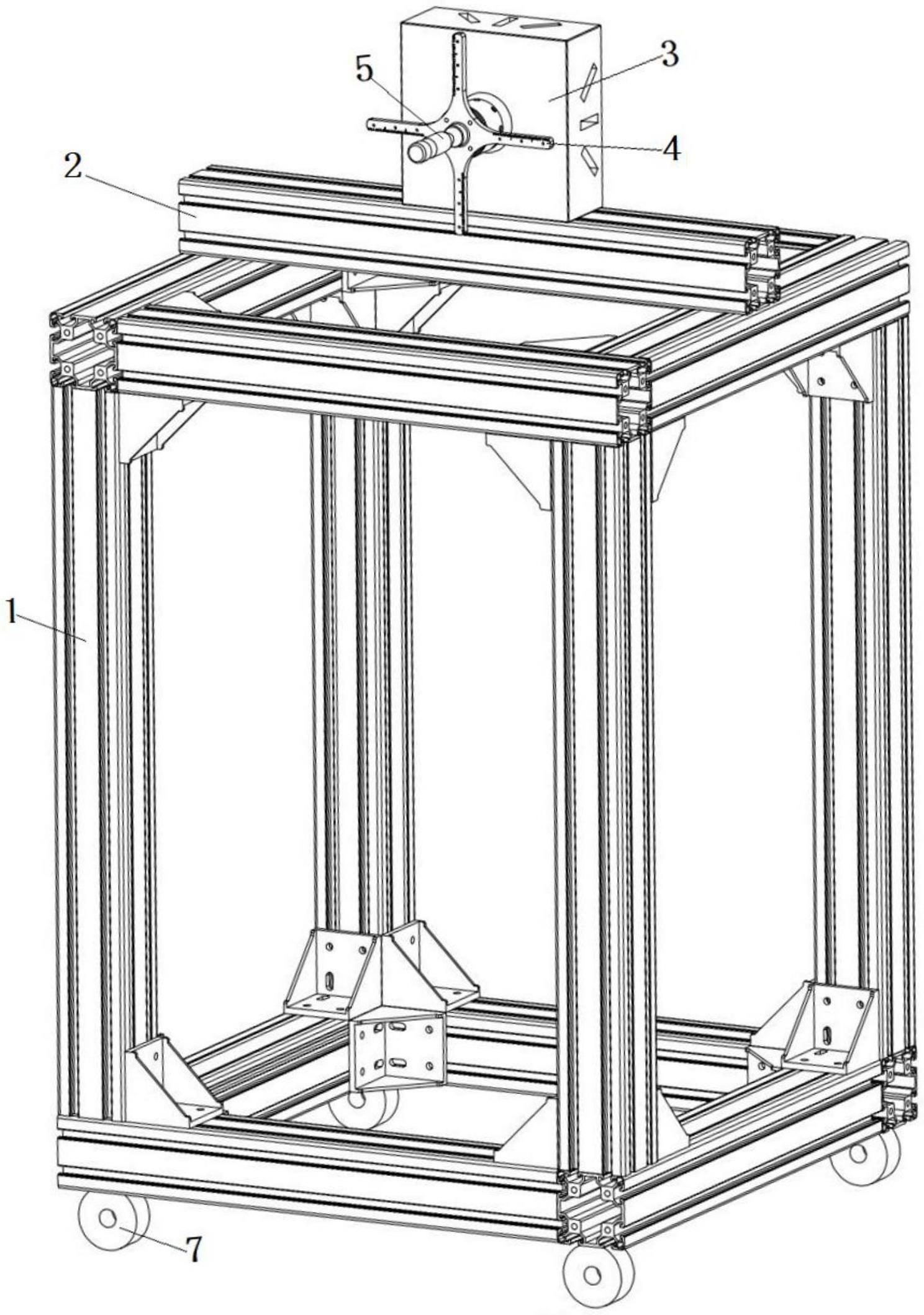
2、为了实现上述目的,本实用新型采用如下技术方案:一种六维力传感器简易标定装置,包括基座、定位杆、固定框、十字法兰架和测量螺杆,所述基座为镂空框架结构,所述定位杆固定在基座的顶端,所述固定框为矩形结构,所述固定框的边缘设置有通槽,所述固定框通过螺栓固定在定位杆上,所述固定框的顶端中心位置设置有传感器安装槽,六维力传感器安装在传感器安装槽中,所述十字法兰架安装在六维力传感器的测量端,所述测量螺杆设置在十字法兰架上。
3、进一步的,所述十字法兰架设置有四条完全相同的测量杆,所述测量杆上等间距的设置有挂装孔并标注有刻度,所述十字法兰架的中心位置设置有轴向定位孔,所述轴向定位孔设置有内螺纹,所述测量螺杆与轴向定位孔螺纹连接。
4、进一步的,还包括标定砝码,所述标定砝码通过挂钩或绑绳挂装在十字法兰架的挂装孔或测量螺杆上。
5、进一步的,所述螺杆上设置有若干v型挂槽,用于标定砝码的挂装。
6、进一步的,还包括调平福马轮,所述调平福马轮设置在基座底端。
7、进一步的,还包括挂装吊环,所述挂装吊环的一端设置有与轴向定位孔相匹配的螺纹,所述挂装吊环与轴向定位孔螺纹连接。
8、本实用新型的有益效果为:
9、本实用新型标定装备造价经济低廉,标定方法简单易操作,能够实现六维力传感器的快速标定,同时能够通过改变标定砝码的数量和利用测量杆的不同标定孔改变力臂的尺寸,组合出多个准确的力矩值,能够对标定后的结果进行反复验证,确认其是否在要求的误差范围内,从而实现对六维力传感器精准标定。
技术特征:
1.一种六维力传感器简易标定装置,用于六维力传感器的标定,其特征在于:包括基座、定位杆、固定框、十字法兰架和测量螺杆,所述基座为镂空框架结构,所述定位杆固定在基座的顶端,所述固定框为矩形结构,所述固定框的边缘设置有通槽,所述固定框通过螺栓固定在定位杆上,所述固定框的顶端中心位置设置有传感器安装槽,六维力传感器安装在传感器安装槽中,所述十字法兰架安装在六维力传感器的测量端,所述测量螺杆设置在十字法兰架上。
2.根据权利要求1所述的一种六维力传感器简易标定装置,其特征在于,所述十字法兰架设置有四条完全相同的测量杆,所述测量杆上等间距的设置有挂装孔并标注有刻度,所述十字法兰架的中心位置设置有轴向定位孔,所述轴向定位孔设置有内螺纹,所述测量螺杆与轴向定位孔螺纹连接。
3.根据权利要求2所述的一种六维力传感器简易标定装置,其特征在于,还包括标定砝码,所述标定砝码通过挂钩或绑绳挂装在十字法兰架的挂装孔或测量螺杆上。
4.根据权利要求1所述的一种六维力传感器简易标定装置,其特征在于,所述测量螺杆上设置有若干v型挂槽,用于标定砝码的挂装。
5.根据权利要求1所述的一种六维力传感器简易标定装置,其特征在于,还包括调平福马轮,所述调平福马轮设置在基座底端。
6.根据权利要求1所述的一种六维力传感器简易标定装置,其特征在于,还包括挂装吊环,所述挂装吊环的一端设置有与轴向定位孔相匹配的螺纹,所述挂装吊环与轴向定位孔螺纹连接。
技术总结
本技术公开了一种六维力传感器简易标定装置,涉及传感器标定领域,包括基座、定位杆、固定框、十字法兰架和测量螺杆,所述基座为镂空框架结构,所述定位杆固定在基座的顶端,所述固定框为矩形结构,所述固定框的边缘设置有通槽,所述固定框通过螺栓固定在定位杆上,所述固定框的顶端中心位置设置有传感器安装槽,六维力传感器安装在传感器安装槽中,所述十字法兰架安装在六维力传感器的测量端,所述测量螺杆设置在十字法兰架上。本技术简易标定装备造价经济低廉,标定方法简单易操作,标定精度高。
技术研发人员:王清亮
受保护的技术使用者:苏州十坤传感科技有限公司
技术研发日:20230220
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!