地外天体非结构化表面附着钻取采样装置
本技术涉及深空探测采样装置,特别涉及一种地外天体非结构化表面附着钻取采样装置。
背景技术:
1、地外天体(包括月球、火星、小行星、彗星等)表面样本具有反应其物化特征的重要信息,附着在天体不同表面并对不同位置样本开展采样活动对科学探索与分析地外天体具有重要意义。地外天体一般具备典型的非结构化表面环境,而非结构化表面一般材质性能不均,结构及尺寸变化不规律,探测信息不可描述,这对空间附着机构的设计提出巨大挑战。除此之外,地外天体极端的工作环境,包括低微重力、昼夜温差、真空条件等使得开展采样活动极为困难。传统的空间探测机器人,如轮式、腿式以及履带式采样机器人可能在地外天体非结构化表面的附着适应能力以及采样能力等方面受到不同程度的限制。因此,急需一种能够自适应地外天体非结构化表面的具有冗余自由度的附着机构以及冲击取样机制,以便为这些问题提供有效的解决方案。
技术实现思路
1、为解决上述地外天体非结构化表面附着与取样问题,本实用新型的目的在于提供一种地外天体非结构化表面附着钻取采样装置。
2、为了实现上述目的,本实用新型采用以下技术方案:
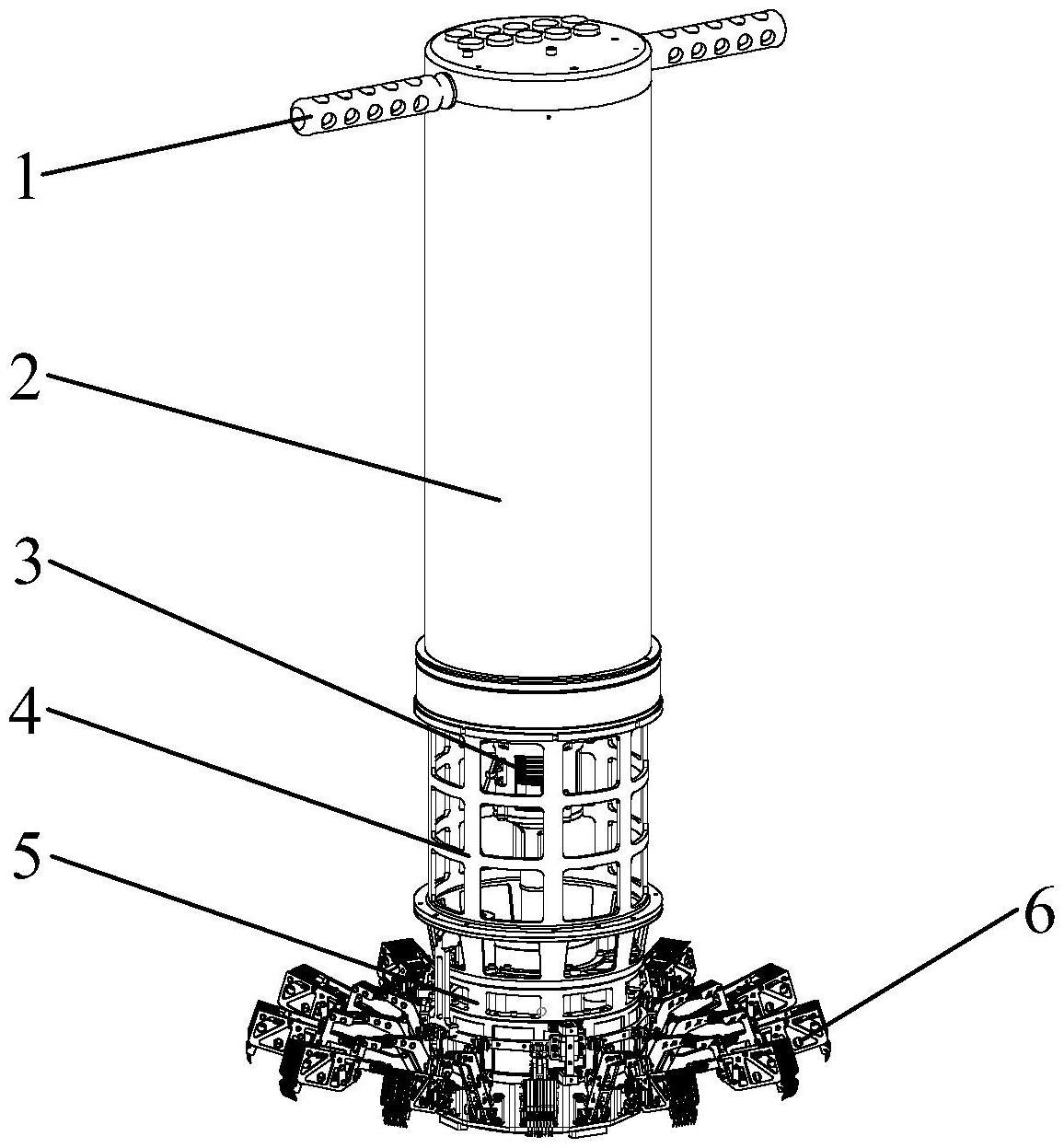
3、本实用新型提供一种地外天体非结构化表面附着钻取采样装置,包括:
4、钻取动力机构,用于供电并为冲击钻取机构提供动力;
5、冲击钻取机构,与钻取动力机构的输出端连接,用于对地外天体表面进行钻取采样;
6、附着机构,设置于钻取动力机构的下端,用于附着于地外天体表面;
7、操控机构,设置于钻取动力机构的上端,用于对附着机构和钻取采样机构进行控制。
8、所述附着机构包括转接环、附着基座和多个附着爪,其中转接环连接在所述钻取动力机构和附着基座之间;
9、附着基座包括法兰、安装座、基座外壳、附着动力机构及升降组件,其中法兰设置于基座外壳的上端,基座外壳的下部沿周向设有多个安装座,多个附着爪分别安装在多个安装座上,升降组件可沿竖直方向滑动地设置于基座外壳的外侧,且与多个附着爪连接;
10、附着动力机构设置于基座外壳的内侧,且与升降组件和多个附着爪连接,附着动力机构为多个附着爪的动作提供动力。
11、所述附着爪包括爪部、连杆ⅰ、连杆ⅱ、连杆ⅲ、小拉簧、小拉簧基座、释放拉绳基座、附着拉绳及大拉簧,其中连杆ⅰ、连杆ⅱ及连杆ⅲ依次首尾铰接,连杆ⅰ的前端与爪部的后端固定连接,连杆ⅲ的后端与所述安装座铰接;小拉簧基座和释放拉绳基座均设置于连杆ⅲ上,小拉簧基座通过小拉簧与连杆ⅱ连接;释放拉绳基座与所述升降组件连接;附着拉绳的一端通过大拉簧与连杆ⅰ连接,附着拉绳的另一端与所述附着动力机构连接。
12、所述钻取动力机构包括密封壳及设置于密封壳内的直流电源、动力传输机构和传感机构,其中直流电源用于给附着钻取采样装置供电;动力传输机构具有绕竖直轴旋转及上下移动的自由度;传感机构连接在动力传输机构的输出端与所述冲击钻取机构之间,用于检测钻取压力、扭矩及转速。
13、所述传感机构包括扭矩传感器、压力传感器ⅰ、编码器、传感器保持架、压力传感器ⅱ及传感主轴,其中扭矩传感器、压力传感器ⅰ和压力传感器ⅱ由上至下依次安装于传感主轴上,编码器安装于压力传感器ⅰ外部,传感器保持架安装于编码器外部;传感主轴的上端与所述动力传输机构连接,下端与所述冲击钻取机构连接;扭矩传感器和编码器分别用于检测所述传感主轴的扭矩和转速,压力传感器ⅰ和压力传感器ⅱ用于检测钻取压力。
14、所述冲击钻取机构包括冲击机构和取样机构,其中冲击机构的上端与所述传感机构连接,下端与取样机构连接,所述动力传输机构驱动冲击机构和取样机构旋转,冲击机构用于对取样机构进行冲击,通过冲击机构和取样机构配合实现地外天体表面钻取采样。
15、所述冲击机构包括冲击主轴、冲击外框架、锁定机构、冲击模块及取样机构安装头,其中冲击模块安装于冲击主轴上,冲击主轴的上端与所述传感机构连接,冲击外框架设置于冲击模块的外侧,冲击主轴和冲击外框架的下端通过取样机构安装头与所述取样机构连接;锁定机构设置于冲击外框架上,用于锁定冲击模块。
16、所述冲击模块包括凸轮、滚轮及碟簧,其中碟簧和凸轮由上至下套设于所述冲击主轴的外侧,凸轮为下端面具有凸轮结构的中空圆柱体,凸轮与所述冲击外框架可沿轴向滑动配合,碟簧为凸轮的向下滑动提供驱动力;滚轮设置于所述冲击主轴上,且滚轮与所述凸轮的凸轮结构接触。
17、所述取样机构包括缓冲转接杆、钻杆安装头及取芯钻杆,其中缓冲转接杆上端与所述冲击机构连接,钻杆安装头装配于缓冲转接杆的下端,且可相对缓冲转接杆轴向滑动,缓冲转接杆内装配有缓冲弹簧;取芯钻杆为中空结构,且上端与钻杆安装头连接。
18、本实用新型的优点及有益效果是:本实用新型提供的一种地外天体非结构化表面附着钻取采样装置,通过模块化、轻量化设计使装置结构紧凑,便于操控,功耗小,方便携带,通过冲击钻取机构实现自动持续钻进采样;可在宇航员辅助操作装配或无人自动操作下,实现对地外天体非结构化表面附着并进行取芯采样。
技术特征:
1.一种地外天体非结构化表面附着钻取采样装置,其特征在于,包括:
2.根据权利要求1所述的地外天体非结构化表面附着钻取采样装置,其特征在于,所述附着机构包括转接环(4)、附着基座(5)和多个附着爪(6),其中转接环(4)连接在所述钻取动力机构(2)和附着基座(5)之间;
3.根据权利要求2所述的地外天体非结构化表面附着钻取采样装置,其特征在于,所述附着爪(6)包括爪部、连杆ⅰ(604)、连杆ⅱ(605)、连杆ⅲ(606)、小拉簧(607)、小拉簧基座(608)、释放拉绳基座(609)、附着拉绳(610)及大拉簧(611),其中连杆ⅰ(604)、连杆ⅱ(605)及连杆ⅲ(606)依次首尾铰接,连杆ⅰ(604)的前端与爪部的后端固定连接,连杆ⅲ(606)的后端与所述安装座(506)铰接;小拉簧基座(608)和释放拉绳基座(609)均设置于连杆ⅲ(606)上,小拉簧基座(608)通过小拉簧(607)与连杆ⅱ(605)连接;释放拉绳基座(609)与所述升降组件连接;附着拉绳(610)的一端通过大拉簧(611)与连杆ⅰ(604)连接,附着拉绳(610)的另一端与所述附着动力机构(508)连接。
4.根据权利要求1或2所述的地外天体非结构化表面附着钻取采样装置,其特征在于,所述钻取动力机构(2)包括密封壳及设置于密封壳内的直流电源(204)、动力传输机构(205)和传感机构(206),其中直流电源(204)用于给附着钻取采样装置供电;动力传输机构(205)具有绕竖直轴旋转及上下移动的自由度;传感机构(206)连接在动力传输机构(205)的输出端与所述冲击钻取机构之间,用于检测钻取压力、扭矩及转速。
5.根据权利要求4所述的地外天体非结构化表面附着钻取采样装置,其特征在于,所述传感机构(206)包括扭矩传感器(2061)、压力传感器ⅰ(2062)、编码器(2063)、传感器保持架(2064)、压力传感器ⅱ(2065)及传感主轴(2066),其中扭矩传感器(2061)、压力传感器ⅰ(2062)和压力传感器ⅱ(2065)由上至下依次安装于传感主轴(2066)上,编码器(2063)安装于压力传感器ⅰ(2062)外部,传感器保持架(2064)安装于编码器(2063)外部;传感主轴(2066)的上端与所述动力传输机构(205)连接,下端与所述冲击钻取机构连接;扭矩传感器(2061)和编码器(2063)分别用于检测所述传感主轴(2066)的扭矩和转速,压力传感器ⅰ(2062)和压力传感器ⅱ(2065)用于检测钻取压力。
6.根据权利要求4所述的地外天体非结构化表面附着钻取采样装置,其特征在于,所述冲击钻取机构包括冲击机构(3)和取样机构(7),其中冲击机构(3)的上端与所述传感机构(206)连接,下端与取样机构(7)连接,所述动力传输机构(205)驱动冲击机构(3)和取样机构(7)旋转,冲击机构(3)用于对取样机构(7)进行冲击,通过冲击机构(3)和取样机构(7)配合实现地外天体表面钻取采样。
7.根据权利要求6所述的地外天体非结构化表面附着钻取采样装置,其特征在于,所述冲击机构(3)包括冲击主轴(301)、冲击外框架(302)、锁定机构(303)、冲击模块(304)及取样机构安装头(305),其中冲击模块(304)安装于冲击主轴(301)上,冲击主轴(301)的上端与所述传感机构(206)连接,冲击外框架(302)设置于冲击模块(304)的外侧,冲击主轴(301)和冲击外框架(302)的下端通过取样机构安装头(305)与所述取样机构(7)连接;锁定机构(303)设置于冲击外框架(302)上,用于锁定冲击模块(304)。
8.根据权利要求7所述的地外天体非结构化表面附着钻取采样装置,其特征在于,所述冲击模块(304)包括凸轮(3041)、滚轮(3042)及碟簧(3043),其中碟簧(3043)和凸轮(3041)由上至下套设于所述冲击主轴(301)的外侧,凸轮(3041)为下端面具有凸轮结构的中空圆柱体,凸轮(3041)与所述冲击外框架(302)可沿轴向滑动配合,碟簧(3043)为凸轮(3041)的向下滑动提供驱动力;滚轮(3042)设置于所述冲击主轴(301)上,且滚轮(3042)与所述凸轮(3041)的凸轮结构接触。
9.根据权利要求6所述的地外天体非结构化表面附着钻取采样装置,其特征在于,所述取样机构(7)包括缓冲转接杆(701)、钻杆安装头(703)及取芯钻杆(705),其中缓冲转接杆(701)上端与所述冲击机构(3)连接,钻杆安装头(703)装配于缓冲转接杆(701)的下端,且可相对缓冲转接杆(701)轴向滑动,缓冲转接杆(701)内装配有缓冲弹簧;取芯钻杆(705)为中空结构,且上端与钻杆安装头(703)连接。
技术总结
本技术涉及深空探测采样装置,特别涉及一种地外天体非结构化表面附着钻取采样装置。包括操控机构、钻取动力机构、冲击钻取机构及附着机构,其中钻取动力机构用于为冲击钻取机构提供动力;冲击钻取机构与钻取动力机构的输出端连接,用于对地外天体表面进行钻取采样;附着机构设置于钻取动力机构的下端,用于附着于地外天体表面;操控机构设置于钻取动力机构的上端,用于对附着机构和冲击钻取机构进行控制。本技术通过模块化、轻量化设计使装置结构紧凑、便于操控,可在宇航员辅助操作装配或无人自动操作下实现对地外天体非结构化表面附着并进行取芯采样。
技术研发人员:张伟,程钦锟,周维佳,李俊麟,李振新,于涛,王博,王守瑞
受保护的技术使用者:中国科学院沈阳自动化研究所
技术研发日:20230303
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!