一种无GPS条件下的无人机定位导航系统的制作方法
本申请涉及飞行导航领域,尤其涉及一种无gps条件下的无人机定位导航系统。
背景技术:
1、当前飞行器定位导航都是基于gps定位的条件下进行的,通过飞行器机载gps获取飞行器当前位置,飞控发送给飞行器下一个航点的gps信息,飞行器将会从飞行器当前位置飞向接收到的gps位置,但是在有些无gps区域或者gps信号不稳定的区域,飞行器无法进行精准定位以及自动导航飞行。
技术实现思路
1、本申请的目的在于克服现有技术中存在的缺陷,提供一种无gps条件下的无人机定位导航系统。
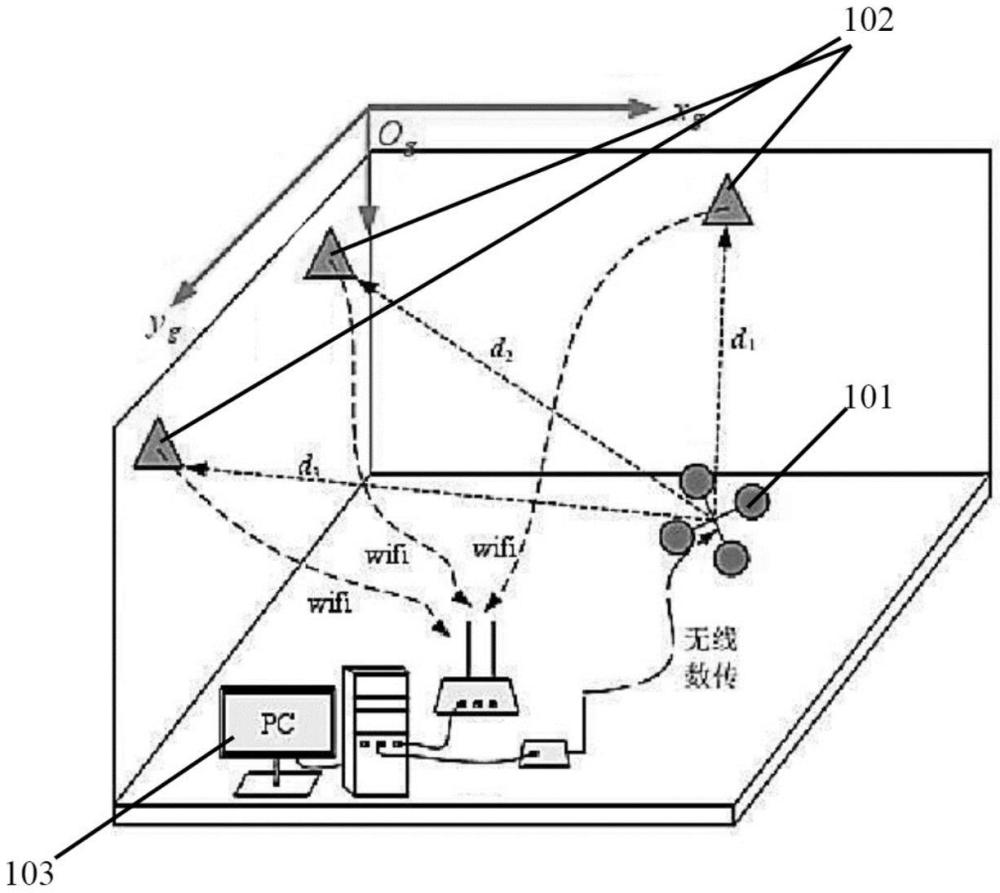
2、本申请提供的一种无gps条件下的无人机定位导航系统,包括:飞行器模块,多个基站模块和处理模块;
3、所述飞行器模块通过无线网络连接所述固定点模块,所述固定点模块通过无线网络连接所述处理模块;
4、所述飞行器模块上设置有雷达单元、飞行系统单元、第一发送单元和第一接收单元,该雷达单元和飞行系统单元连接所述第一发送单元,将获取的第一数据通过所述第一发送单元进行发送;
5、多个所述基站模块分别设置在预设范围内不同位置处,包括第二接收模块,用于接收所述第一发送单元发送的第一数据,并将包含所述第一数据的第二数据通过第二发送单元进行发送;
6、所述处理模块包括第三接收单元、处理单元和第三发送单元,所述第三接收单元接收所述第二数据,该第二数据经过所述处理单元处理生成第三数据发送到所述第一接收单元,用于所述飞行器模块导航控制。
7、可选的,所述第三数据包括:根据所述基站位数据置计算出的飞行器位置数据。
8、可选的,所述雷达单元用于获取预设区域内地形数据。
9、可选的,所述多个基站模块包括三个基站模块。
10、可选的,所述处理模块包括,计算机设备、以及所述计算机设备连接的接收设备和发送设备。
11、本申请的优点和有益效果:
12、本申请提供的一种无gps条件下的无人机定位导航系统,包括:飞行器模块,多个基站模块和处理模块;所述飞行器模块通过无线网络连接所述固定点模块,所述固定点模块通过无线网络连接所述处理模块;所述飞行器模块上设置有雷达单元、飞行系统单元、第一发送单元和第一接收单元,该雷达单元和飞行系统单元连接所述第一发送单元,将获取的第一数据通过所述第一发送单元进行发送;多个所述基站模块分别设置在预设范围内不同位置处,包括第二接收模块,用于接收所述第一发送单元发送的第一数据,并将包含所述第一数据的第二数据通过第二发送单元进行发送;所述处理模块包括第三接收单元、处理单元和第三发送单元,所述第三接收单元接收所述第二数据,该第二数据经过所述处理单元处理生成第三数据发送到所述第一接收单元,用于所述飞行器模块导航控制。本申请通过多个基站进行与飞行器的通讯和传递,实现飞行器自主导航,方法简单高效,有助于无gps信号时的航测、检查的顺利执行。
技术特征:
1.一种无gps条件下的无人机定位导航系统,其特征在于,包括:飞行器模块,多个基站模块和处理模块;
2.根据权利要求1所述无gps条件下的无人机定位导航系统,其特征在于,所述第三数据包括:根据基站位置数据计算出的飞行器位置数据。
3.根据权利要求1所述无gps条件下的无人机定位导航系统,其特征在于,所述雷达单元用于获取预设区域内地形数据。
4.根据权利要求1所述无gps条件下的无人机定位导航系统,其特征在于,所述多个基站模块包括三个基站模块。
5.根据权利要求1所述无gps条件下的无人机定位导航系统,其特征在于,所述处理模块包括,计算机设备、以及所述计算机设备连接的接收设备和发送设备。
技术总结
本申请提供的一种无GPS条件下的无人机定位导航系统,包括:飞行器模块,多个基站模块和处理模块;所述飞行器模块通过无线网络连接所述固定点模块,所述固定点模块通过无线网络连接所述处理模块;所述飞行器模块获取的第一数据通过所述第一发送模块进行发送;多个所述基站模块分别设置在预设范围内不同位置处,用于接收所述第一数据,并将包含所述第一数据的第二数据通过第二发送单元进行发送;所述处理模块接收所述第二数据,该第二数据经过处理生成第三数据发送到所述飞行器模块,用于所述飞行器模块导航控制。本申请通过多个基站进行与飞行器的通讯和传递,实现飞行器自主导航,方法简单高效,有助于无GPS信号时的航测、检查的顺利执行。
技术研发人员:李伟,李俊杰
受保护的技术使用者:长江勘测规划设计研究有限责任公司
技术研发日:20230320
技术公布日:2024/3/4
- 还没有人留言评论。精彩留言会获得点赞!