用于无人驾驶汽车激光雷达的光感应电机的制作方法
本申请涉及电机,特别涉及用于无人驾驶汽车激光雷达的光感应电机。
背景技术:
1、目前市面上许多中高端新能源汽车都配备了激光雷达,在这项配置的加持下,车辆不仅可以实现部分速度范围或依靠道路标线识别,而且还拥有更加出色的环境监测功能,让车辆的智能和安全程度都得到进一步的提升。
2、然而现有的激光雷达在转镜接收到激光后进行反射时,容易受到转镜周围部件的干扰,致使转镜反射的激光存在误差,影响激光雷达的精度。
技术实现思路
1、针对现有技术中存在的技术问题,本申请提出了一种用于无人驾驶汽车激光雷达的光感应电机,能够解决至少一种技术问题。
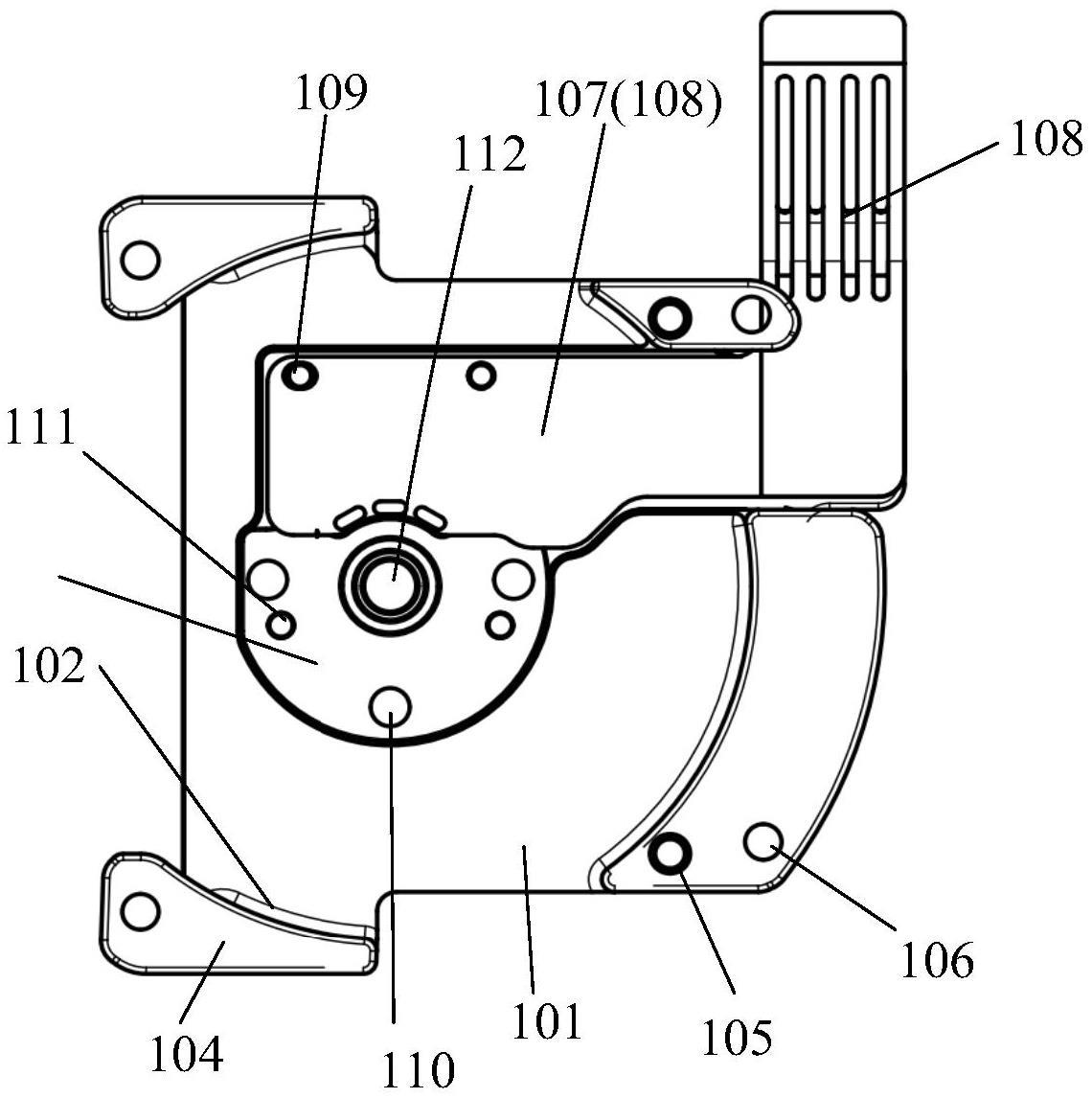
2、本申请提出的用于无人驾驶汽车激光雷达的光感应电机,包括底座和转镜,其特征在于,所述底座包括形状不规则的底板和与所述底板垂直设置的多个形状不规则的侧壁,多个所述侧壁沿所述转镜的外周方向设置围设形成第一容置腔,所述转镜容置在所述第一容置腔内;所述侧壁的顶部设有凸沿,所述凸沿上设有定位柱和螺孔,所述定位柱和螺孔的设置位置和数量与所述光感应电机的外接客户机对应适配;所述底板和所述侧壁的表面设有消光层。
3、可选的,所述消光层的漫反射率小于3.5%。
4、可选的,所述侧壁的数量为4个,4个所述侧壁沿所述转镜的外周方向间隔设置。
5、可选的,所述底板上开设有容置槽,所述容置槽内置有pcb板。
6、可选的,所述第一容置腔的腔壁上设有多个第一螺孔和第一定位柱,所述第一螺孔和第一定位柱沿所述第一容置腔内的环形腔间隔设置,所述环形腔用于放置所述转镜内的轴芯,所述第一定位柱与所述转镜内的定子座的定位孔相配合,所述第一螺孔与所述转镜内的定子座上的螺钉相配合。
7、可选的,所述容置槽设有多个第二定位柱,用于与pcb板的定位孔相配合,所述pcb板与所述容置槽之间设有粘接层,与所述底板一体成型。
8、可选的,所述第一定位柱的设置数量为2个,所述第一螺孔的设置数量为3个。
9、可选的,所述第二定位柱的设置数量为2个。
10、可选的,每块所述侧壁的所述凸沿上均设有螺孔,相邻的两块侧壁上设有与所述外接客户机对应的定位孔,所述螺孔和所述定位孔的设置数量均为1个。
11、可选的,所述底座为金属材质。
12、可选的,所述定子座的内侧设有轴芯组件、所述定子座的外侧设有磁感应组件,所述定子座的底部凸沿设有第一定位孔和第二螺孔,所述第一定位孔与所述第一定位柱配合定位,所述第二螺孔与所述第一螺孔的位置和数量对应适配。
13、本申请提出的用于无人驾驶汽车激光雷达的光感应电机通过在底板和侧壁上设置消光层,消除了底板和侧壁对光源的干扰;并且使pcb板与底座进行点胶处理,使pcb板与底座形成一个整体,消除了转镜运转时转镜与pcb板的摩擦。
技术特征:
1.一种用于无人驾驶汽车激光雷达的光感应电机,包括底座和转镜,其特征在于,所述底座包括形状不规则的底板和与所述底板垂直设置的多个形状不规则的侧壁,多个所述侧壁沿所述转镜的外周方向设置围设形成第一容置腔,所述转镜容置在所述第一容置腔内;所述侧壁的顶部设有凸沿,所述凸沿上设有定位柱和螺孔,所述定位柱和螺孔的设置位置和数量与所述光感应电机的外接客户机对应适配;所述底板和所述侧壁的表面设有消光层。
2.根据权利要求1所述的用于无人驾驶汽车激光雷达的光感应电机,其特征在于,所述消光层的漫反射率小于3.5%。
3.根据权利要求1所述的用于无人驾驶汽车激光雷达的光感应电机,其特征在于,所述侧壁的设置数量为4个,4个所述侧壁沿所述转镜的外周方向间隔设置。
4.根据权利要求1所述的用于无人驾驶汽车激光雷达的光感应电机,其特征在于,所述底板上开设有容置槽,所述容置槽内置有pcb板。
5.根据权利要求1所述的用于无人驾驶汽车激光雷达的光感应电机,其特征在于,所述第一容置腔的腔壁上设有多个第一螺孔和第一定位柱,所述第一螺孔和第一定位柱沿所述第一容置腔内的环形腔间隔设置,所述环形腔用于放置所述转镜内的轴芯,所述第一定位柱与所述转镜内的定子座的定位孔相配合,所述第一螺孔与所述转镜内的定子座上的螺钉相配合。
6.根据权利要求4所述的用于无人驾驶汽车激光雷达的光感应电机,其特征在于,所述容置槽设有多个第二定位柱,用于与pcb板的定位孔相配合,所述pcb板与所述容置槽之间设有粘接层,与所述底板一体成型。
7.根据权利要求5所述的用于无人驾驶汽车激光雷达的光感应电机,其特征在于,所述第一定位柱的设置数量为2个,所述第一螺孔的设置数量为3个。
8.根据权利要求6所述的用于无人驾驶汽车激光雷达的光感应电机,其特征在于,所述第二定位柱的设置数量为2个。
9.根据权利要求1所述的用于无人驾驶汽车激光雷达的光感应电机,其特征在于,每块所述侧壁的所述凸沿上均设有螺孔,相邻的两块侧壁上设有与所述外接客户机对应的定位孔,所述螺孔和所述定位孔的设置数量均为1个。
10.根据权利要求1所述的用于无人驾驶汽车激光雷达的光感应电机,其特征在于,所述底座为金属材质。
11.根据权利要求5所述的用于无人驾驶汽车激光雷达的光感应电机,其特征在于,所述定子座的内侧设有轴芯组件、所述定子座的外侧设有磁感应组件,所述定子座的底部凸沿设有第一定位孔和第二螺孔,所述第一定位孔与所述第一定位柱配合定位,所述第二螺孔与所述第一螺孔的位置和数量对应适配。
技术总结
本申请公开了用于无人驾驶汽车激光雷达的光感应电机,包括底座和转镜,所述底座包括形状不规则的底板和与所述底板垂直设置的多个形状不规则的侧壁,多个所述侧壁沿所述转镜的外周方向设置围设形成第一容置腔,所述转镜容置在所述第一容置腔内;所述侧壁的顶部设有凸沿,所述凸沿上设有定位柱和螺孔,所述定位柱和螺孔的设置位置和数量与所述光感应电机的外接客户机对应适配;所述底板和所述侧壁的表面设有消光层。本申请提出的用于无人驾驶汽车激光雷达的光感应电机通过设置消光层,有效防止了转镜运转时底板和侧壁对镜面形成光源干扰。
技术研发人员:赵晋烨,吴东方
受保护的技术使用者:浙江睿驰同利汽车电子有限公司
技术研发日:20230315
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!