一种AGV小车惯性导航误差矫正装置
本技术涉及agv小车的导航,尤其涉及一种agv小车惯性导航误差矫正装置。
背景技术:
1、当前agv小车的导航技术主要有如下几种:固定路径导航、地标式导航、室内gps导航、视觉雷达导航和惯性导航。
2、惯性导航的导航方式为:借助导航装置自带的陀螺仪与编码器,记录agv在每个时间步长内运行的距离与方向,将如上信息累加计算出当前的坐标。该方法可以实时获取坐标信息,相较于室内gps导航,该方法的定位精度也有了较大幅度提高,同时,该方法不依赖于外部环境,抗干扰能力较强。但该方法的一个重要缺点在于,陀螺仪会随着上电时间的增加而产生较大的误差,因此不适用于长时间运行。
3、惯性导航产生误差的原因有如下两点:第一是随着上电时间的增长,陀螺仪会产生一定的累积误差,导致agv小车方向判断不准,该误差随着运行距离的增长,会导致较大的线性误差;第二是编码器记步轮的制造误差,导致路程测量出现偏差,此部分引起的误差一般较小且容易根据实际测量结构修正。以上两种误差为惯性导航的系统性误差,无论惯性导航技术如何先进、制造工艺如何精密都无法消除。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种agv小车惯性导航误差矫正装置。
2、一种agv小车惯性导航误差矫正装置,安装在所述agv小车的底盘上,该装置包括:
3、行走单元,设置在所述底盘的底部;
4、惯性导航计,固定在所述底盘上,所述惯性导航计能够对agv小车的行走进行导航,且所述惯性导航计还能够输出agv小车的理论坐标信息;
5、多个地标,间隔地设置在工作场地的地面上,每个所述地标具有对应的实际坐标信息;
6、误差测量单元,设置在所述底盘的四周,当所述agv小车移动到其中一个地标处时,所述误差测量单元能够测量所述agv小车的理论坐标与当前所述地标的实际坐标之间的误差;
7、agv控制器,分别与所述误差测量单元和所述惯性导航计相连接,且所述agv控制器能够根据所述误差测量单元测量出的误差,对所述惯性导航计的坐标信息进行修正。
8、在其中一个实施例中,所述误差测量单元包括:
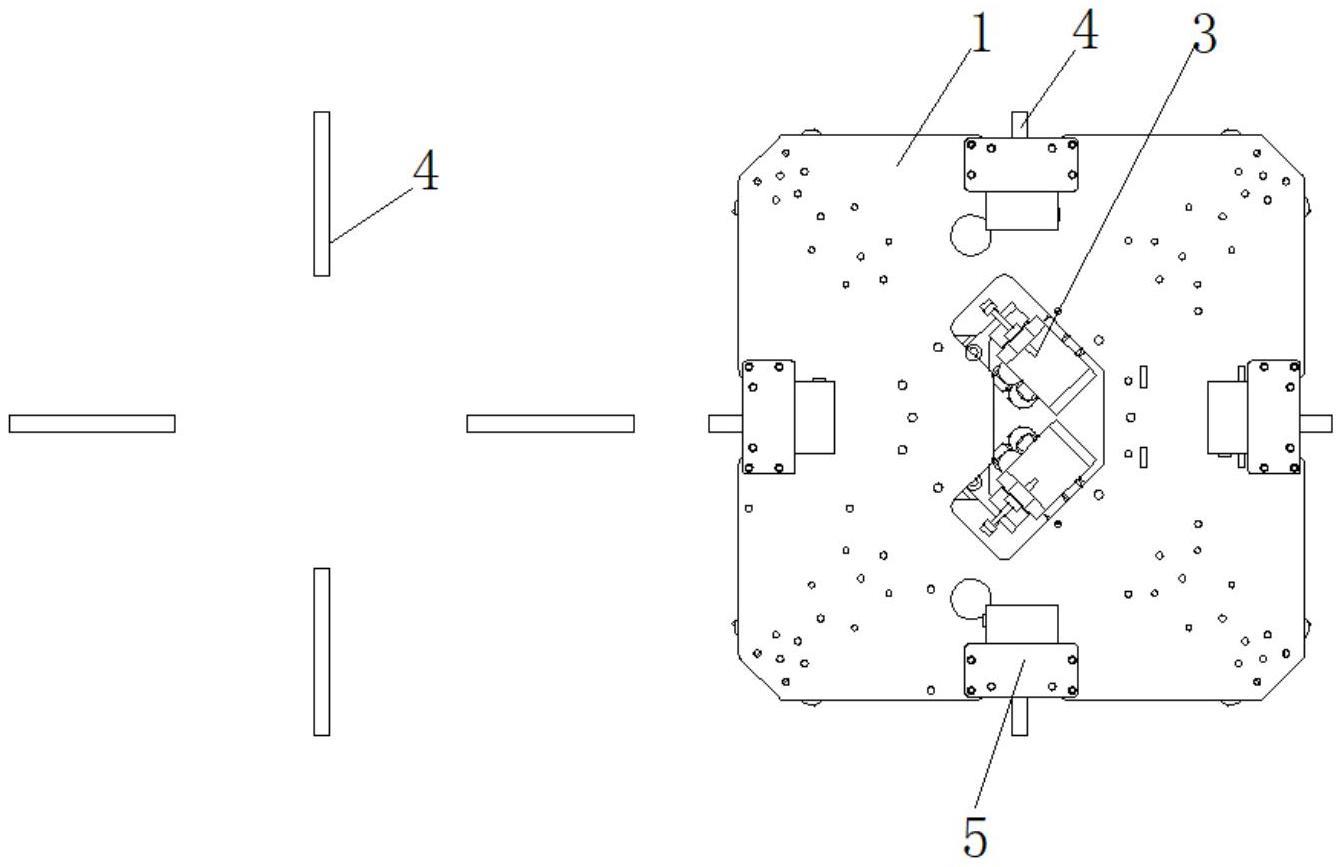
9、x向图片获取单元,包括x向安装架和x向摄像头,所述x向安装架安装所述底盘的x向两侧,所述x向摄像头安装在所述x向安装架上,所述x向摄像头能够获取agv小车与当前所述地标的x向坐标误差;
10、y向图片获取单元,包括y向安装架和y向摄像头,所述y向安装架安装所述底盘的y向两侧,所述y向摄像头安装在所述y向安装架上,所述y向摄像头能够获取agv小车与当前所述地标的y向坐标误差。
11、在其中一个实施例中,所述x向安装架和y向安装架均包括:
12、安装立柱,固定在所述底盘的上表面;
13、固定板,固定在所述安装立柱的顶部;
14、调平板,连接在所述固定板的底部,所述x向摄像头或y向摄像头通过调节块与所述调平板相连接。
15、在其中一个实施例中,所述地标的形状为十字架型,且所述地标的左右两侧和前后两侧能够分别与所述x向摄像头和y向摄像头的位置相对应。
16、在其中一个实施例中,所述行走单元包括电机和全向轮,所述电机固定在所述底盘的底部,所述全向轮与所述电机相连接。
17、在其中一个实施例中,所述底盘的四周设有缺口,所述误差测量单元安装在所述缺口上。
18、上述agv小车惯性导航误差矫正装置,以惯性导航作为基础,在工作场地的地面上设定多个地标,然后,当所述agv小车移动到其中一个地标处时,所述误差测量单元能够测量所述agv小车的实时坐标与当前所述地标的理论坐标之间的误差;从而通过agv控制器修正惯性导航计的陀螺仪与编码器所产生的系统性误差,使惯性导航计具有长时间保持精度的能力,其具有操作简单方便、矫正精度高等优点。
技术特征:
1.一种agv小车惯性导航误差矫正装置,安装在所述agv小车的底盘上,其特征在于,该装置包括:
2.如权利要求1所述的agv小车惯性导航误差矫正装置,其特征在于,所述误差测量单元包括:
3.如权利要求2所述的agv小车惯性导航误差矫正装置,其特征在于,所述x向安装架和y向安装架均包括:
4.如权利要求3所述的agv小车惯性导航误差矫正装置,其特征在于,所述地标的形状为十字架型,且所述地标的左右两侧和前后两侧能够分别与所述x向摄像头和y向摄像头的位置相对应。
5.如权利要求1所述的agv小车惯性导航误差矫正装置,其特征在于,所述行走单元包括电机和全向轮,所述电机固定在所述底盘的底部,所述全向轮与所述电机相连接。
6.如权利要求1所述的agv小车惯性导航误差矫正装置,其特征在于,所述底盘的四周设有缺口,所述误差测量单元安装在所述缺口上。
技术总结
本技术公开了一种AGV小车惯性导航误差矫正装置,安装在AGV小车的底盘上,该装置包括:行走单元,设置在底盘的底部;惯性导航计,固定在底盘上,惯性导航计能够对AGV小车的行走进行导航,且惯性导航计还能够输出AGV小车的理论坐标信息;多个地标,间隔地设置在工作场地的地面上,每个地标具有对应的实际坐标信息;误差测量单元,设置在底盘的四周,当AGV小车移动到其中一个地标处时,误差测量单元能够测量AGV小车的理论坐标与当前地标的实际坐标之间的误差;AGV控制器,分别与误差测量单元和惯性导航计相连接。本技术使惯性导航计具有长时间保持精度的能力,其具有操作简单方便、矫正精度高等优点。
技术研发人员:史晓帆,赵春锋,宋芳,陈浩,徐新成,张亚龙,冷星环,谭晓晓,黄大成
受保护的技术使用者:上海工程技术大学
技术研发日:20230410
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!