一种自动泊车的雷达传感器感知系统的制作方法
本技术涉及超声波雷达,具体涉及一种自动泊车的雷达传感器感知系统。
背景技术:
1、超声波雷达泊车系统由一个主机、十二个超声波雷达传感器组成,十二个超声波雷达传感器均由主机的一路电源供电,且每个传感器的信号分别与主机单独连接,具体如图1所示。
2、目前的超声波雷达泊车系统主要存在以下确定:
3、雷达传感器与主机之间通过tci通信方式进行,通信速率低,数据传输所需时间较长;
4、传统tci通信电路设计,针对每个雷达传感器,mcu控制器都需要有相应的接收机发送电路(即tx/rx回路),用于驱动雷达传感器、以及接收雷达传感器反馈的信息,信号交互电路设计复杂,使用较多的元器件;
5、传统tci通信电路设计,针对每个雷达传感器,mcu控制器都需要有相应的gpi和gpo物理接口,占用较多的mcu io通道,对mcu控制器的接口资源要求较多。
技术实现思路
1、针对现有技术存在的问题,本实用新型的目的在于提供一种自动泊车的雷达传感器感知系统,以降低对mcu的io资源要求。
2、为实现上述目的,本实用新型采用的技术方案是:
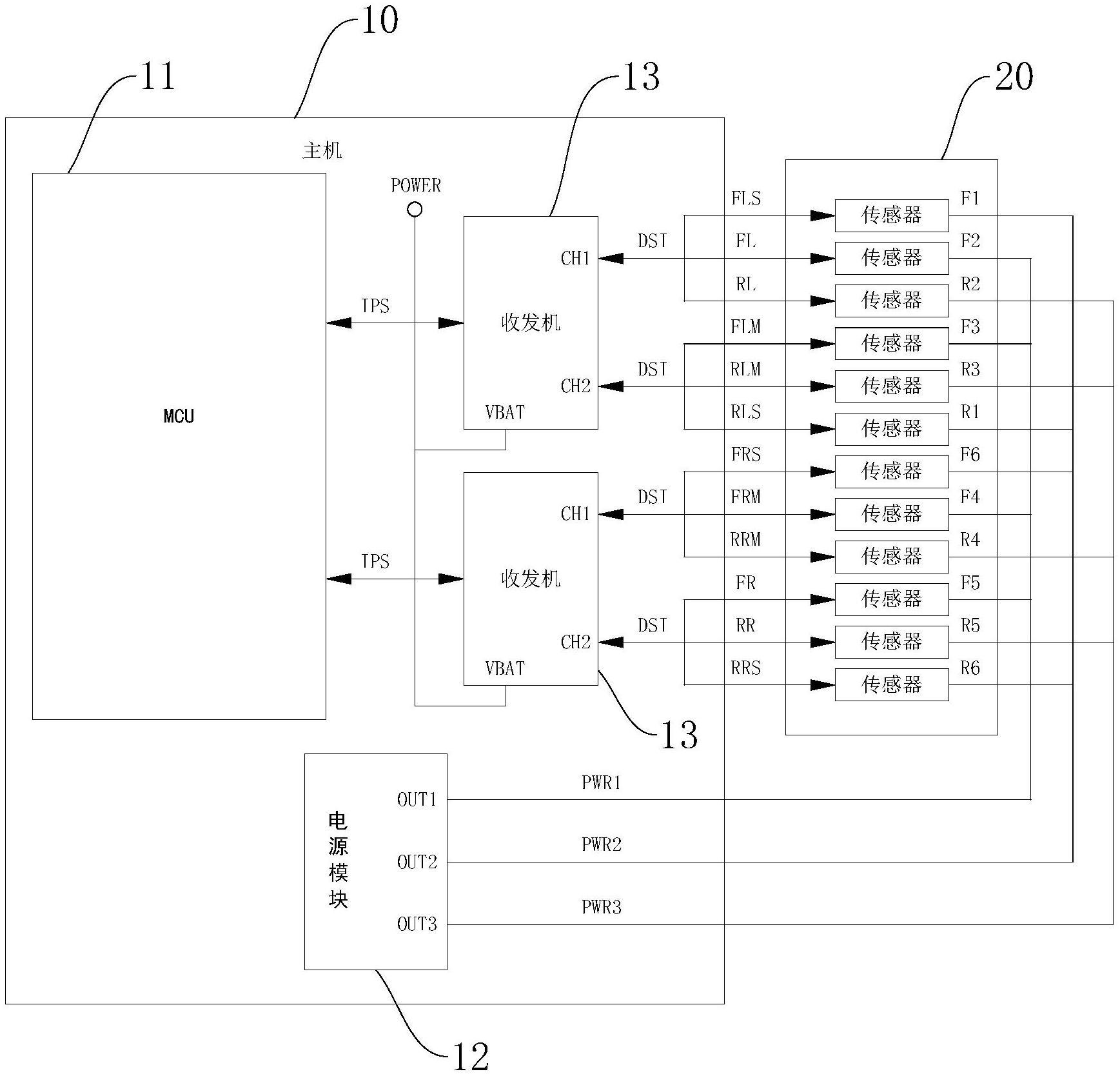
3、一种自动泊车的雷达传感器感知系统,包括一主机、十二个超声波雷达传感器,所述主机包括一mcu控制器、一电源模块和两个收发器;
4、所述mcu控制器与两个收发器采用通信总线进行连接,每一收发器设有两路通信通道,每一路通信通道连接三个超声波雷达传感器;
5、所述mcu控制器还连接电源模块,该电源模块设有三路供电接口,每一供电接口连接四个超声波雷达传感器,各供电接口连接的超声波雷达传感器不相同,且连接在同一供电接口的四个超声波雷达传感器连接在不同的通信通道上。
6、十二个超声波雷达传感器包括安装在车辆侧边左前位置的fls雷达传感器、安装在车辆侧边右前位置的frs雷达传感器、安装在车辆侧边左后位置的rls雷达传感器、安装在车辆侧边右后位置的rrs雷达传感器、安装在车头左侧位置的fl雷达传感器、安装在车头左中位置的flm雷达传感器、安装在车头右侧位置的fr雷达传感器、安装在车头右中位置的frm雷达传感器、安装在车尾左侧位置的rl雷达传感器、安装在车尾左中位置的rlm雷达传感器、安装在车尾右侧位置的rr雷达传感器、安装在车尾右中位置的rrm雷达传感器。
7、三路供电接口为pwr1供电接口、pwr2供电接口和pwr3供电接口;所述pwr1供电接口连接fl雷达传感器、flm雷达传感器、frm雷达传感器、fr雷达传感器;所述pwr2供电接口连接rr雷达传感器、rrm雷达传感器、rl雷达传感器、rlm雷达传感器;所述pwr3供电接口连接fls雷达传感器、frs雷达传感器、rls雷达传感器、rrs雷达传感器。
8、采用上述方案后,本实用新型中主机的供电由一路变为三路供电方式,同时配合两个收发器,一个收发器支持六路雷达信号同步进行收发,从而实现多个雷达信号同接一路的拓扑方式,减少对mcu控制器的io接口的占用。而且,本实用新型采用收发器支持多路雷达信号同步进行收发,使得主机的电路设计更加简单,另外,本实用新型采用总线通信,通信速率高达444kbps,提高了通信速率。
技术特征:
1.一种自动泊车的雷达传感器感知系统,包括一主机、十二个超声波雷达传感器,其特征在于:所述主机包括一mcu控制器、一电源模块和两个收发器;
2.根据权利要求1所述的一种自动泊车的雷达传感器感知系统,其特征在于:十二个超声波雷达传感器包括安装在车辆侧边左前位置的fls雷达传感器、安装在车辆侧边右前位置的frs雷达传感器、安装在车辆侧边左后位置的rls雷达传感器、安装在车辆侧边右后位置的rrs雷达传感器、安装在车头左侧位置的fl雷达传感器、安装在车头左中位置的flm雷达传感器、安装在车头右侧位置的fr雷达传感器、安装在车头右中位置的frm雷达传感器、安装在车尾左侧位置的rl雷达传感器、安装在车尾左中位置的rlm雷达传感器、安装在车尾右侧位置的rr雷达传感器、安装在车尾右中位置的rrm雷达传感器。
3.根据权利要求2所述的一种自动泊车的雷达传感器感知系统,其特征在于:三路供电接口为pwr1供电接口、pwr2供电接口和pwr3供电接口;所述pwr1供电接口连接fl雷达传感器、flm雷达传感器、frm雷达传感器、fr雷达传感器;所述pwr2供电接口连接rr雷达传感器、rrm雷达传感器、rl雷达传感器、rlm雷达传感器;所述pwr3供电接口连接fls雷达传感器、frs雷达传感器、rls雷达传感器、rrs雷达传感器。
技术总结
本技术涉及一种自动泊车的雷达传感器感知系统,包括一主机、十二个超声波雷达传感器,所述主机包括一MCU控制器、一电源模块和两个收发器;所述MCU控制器与两个收发器采用通信总线进行连接,每一收发器设有两路通信通道,每一路通信通道连接三个超声波雷达传感器;所述MCU控制器还连接电源模块,该电源模块设有三路供电接口,每一供电接口连接四个超声波雷达传感器,连接在同一供电接口的四个超声波雷达传感器连接在不同的通信通道上。本技术降低了对MCU的IO资源要求。
技术研发人员:黄水芳,柳叶青,李毅,魏二荣
受保护的技术使用者:同致电子科技(厦门)有限公司
技术研发日:20230412
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!