植物数据采集装置
本技术涉及植物数据采集领域,具体而言,涉及一种植物数据采集装置。
背景技术:
1、目前,植物三维结构模型在植物分子育种和栽培管理的研究中起到了不可替代的作用,而植物三维结构模型的构建技术决定了模型的重构效率、模型精度。现有的植物三维模型构建主要通过图像重构、三维扫描等技术方案实现。
2、在相关技术中,图像重构技术采用的数码相机等视觉传感器设备价格较低,但往往需要移动待测植株置于旋转盘进而采集植株图像,费时费力,无法实现对陆地固定植株的数据采集。同时三维扫描采用的扫描仪、数字化仪等设备价格昂贵,设备在使用过程中难以移动,使用场景受限,部分大型植株三维数据无法采集。
技术实现思路
1、本实用新型的主要目的在于提供一种植物数据采集装置,以解决相关技术中大型植株三维数据无法采集的问题。
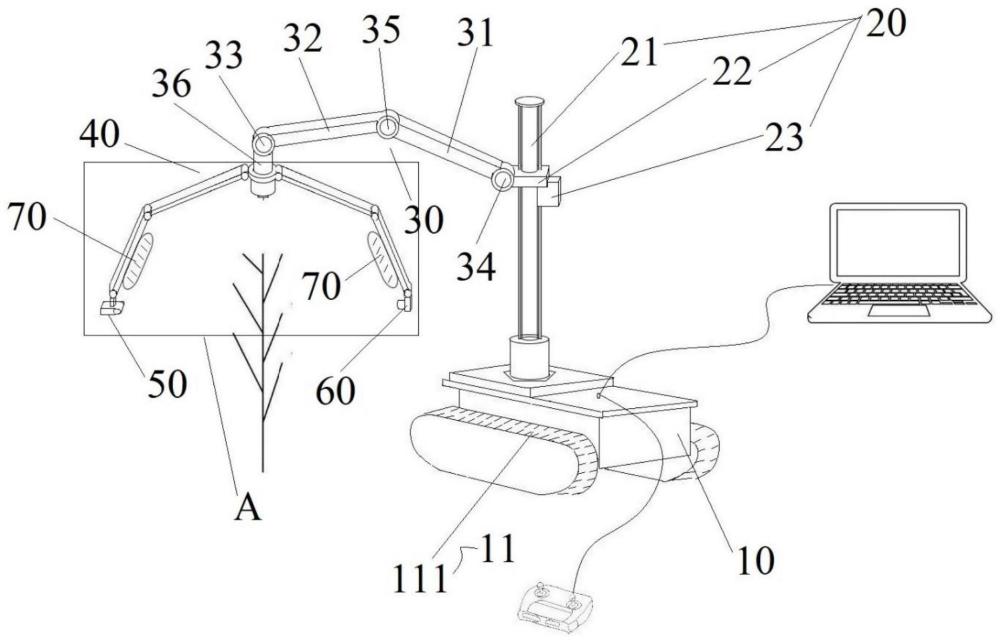
2、为了实现上述目的,本实用新型提供了一种植物数据采集装置,包括:车体;升降机构;支撑臂;连接架;位置采集机构和图像采集机构。车体,具有行进机构;升降机构,设置在步行车上;支撑臂,支撑臂可伸展地设置,支撑臂的第一端连接在升降机构上;连接架,连接架与支撑臂的第二端连接;位置采集机构和图像采集机构,设置在连接架上。
3、进一步地,连接架包括连接环以及与连接环连接的第一连接臂和第二连接臂,第一连接臂的第一端与连接环连接,位置采集机构设置在第一连接臂的第二端,第二连接臂的第一端与连接环连接,图像采集机构设置在第二连接臂的第二端,第一连接臂的第一端和第二连接臂的第一端之间的距离小于第一连接臂的第二端和第二连接臂的第二端之间的距离。
4、进一步地,第一连接臂包括第一臂体和第二臂体,连接架还包括第一电机、第二电机以及第三电机,第一臂体连接在第二臂体和连接环之间,第一电机设置在连接环上,第一电机的输出轴与第一臂体连接,以驱动第一臂体相对连接环摆动,第二电机设置在第一臂体上,第二电机的输出轴与第二臂体连接,以驱动第二臂体相对第一臂体摆动,第三电机设置在第二臂体上,第三电机的输出轴与位置采集机构连接,以驱动所述位置采集机构相对所述第二臂体摆动。
5、进一步地,第二连接臂包括第三臂体和第四臂体,连接架还包括第四电机、第五电机以及第六电机,第四电机设置在连接环上,第四电机的输出轴与第三臂体连接,以驱动第三臂体相对连接环摆动,第五电机设置在第三臂体上,第五电机的输出轴与第四臂体连接,以驱动第四臂体相对第三臂体摆动,第六电机设置在第四臂体上,第六电机的输出轴与图像采集机构连接,以驱动图像采集机构相对第四臂体摆动。
6、进一步地,植物数据采集装置还包括定位装置,定位装置设置在连接环的下方。
7、进一步地,植物数据采集装置还包括照明机构,照明机构设置在第一连接臂和/或第二连接臂上。
8、进一步地,支撑臂包括第一杆体、第二杆体、第三杆体、第七电机、第八电机以及第九电机,第七电机设置在升降机构上,第七电机的输出轴与第一杆体连接,以驱动第一杆体相对升降机构摆动,第八电机设置在第一杆体上,第八电机的输出轴与第二杆体连接,以驱动第二杆体相对第一杆体摆动,第九电机设置在第二杆体上,第九电机的输出轴与第三杆体连接,以驱动第三杆体相对第二杆体摆动。
9、进一步地,升降机构包括立杆、滑块以及第十电机,滑块可移动地设置在立杆上,第十电机驱动滑块沿立杆移动,支撑臂与滑块连接。
10、进一步地,植物数据采集装置还包括控制器,控制器设置在车体内,控制器与升降机构、车体、支撑臂、连接架、位置采集机构以及图像采集机构电连接。
11、进一步地,行进机构包括履带。
12、应用本实用新型的技术方案,车体具有行进机构;升降机构设置在车体上;支撑臂可伸展地设置,支撑臂的第一端连接在升降机构上。连接架与支撑臂的第二端连接;位置采集机构和图像采集机构均设置在连接架上。通过上述的设置,植物数据采集装置可以通过行进机构实现在田间行走,植物数据采集装置可以垂直地面的方向上下移动、横向移位和旋转,这样使得位置采集机构和图像采集机构能够实现对任意植物的数据进行采集,进而提高了植物数据采集装置的通用性。因此本申请的技术方案有效地解决了相关技术中的大型植株三维数据无法采集的问题。
技术特征:
1.一种植物数据采集装置,其特征在于,包括:
2.根据权利要求1所述的植物数据采集装置,其特征在于,所述第一连接臂(42)包括第一臂体(421)和第二臂体(422),所述连接架(40)还包括第一电机(44)、第二电机(45)以及第三电机(46),所述第一臂体(421)连接在所述第二臂体(422)和所述连接环(41)之间,所述第一电机(44)设置在所述连接环(41)上,所述第一电机(44)的输出轴与所述第一臂体(421)连接,以驱动所述第一臂体(421)相对所述连接环(41)摆动,所述第二电机(45)设置在所述第一臂体(421)上,所述第二电机(45)的输出轴与所述第二臂体(422)连接,以驱动所述第二臂体(422)相对所述第一臂体(421)摆动,所述第三电机(46)设置在所述第二臂体(422)上,所述第三电机(46)的输出轴与所述位置采集机构(50)连接,以驱动所述位置采集机构(50)相对所述第二臂体(422)摆动。
3.根据权利要求1所述的植物数据采集装置,其特征在于,所述第二连接臂(43)包括第三臂体(431)和第四臂体(432),所述连接架(40)还包括第四电机(47)、第五电机(48)以及第六电机(49),所述第四电机(47)设置在所述连接环(41)上,所述第四电机(47)的输出轴与所述第三臂体(431)连接,以驱动所述第三臂体(431)相对所述连接环(41)摆动,所述第五电机(48)设置在所述第三臂体(431)上,所述第五电机(48)的输出轴与所述第四臂体(432)连接,以驱动所述第四臂体(432)相对所述第三臂体(431)摆动,所述第六电机(49)设置在所述第四臂体(432)上,所述第六电机(49)的输出轴与所述图像采集机构(60)连接,以驱动所述图像采集机构(60)相对所述第四臂体(432)摆动。
4.根据权利要求1所述的植物数据采集装置,其特征在于,所述植物数据采集装置还包括照明机构(70),所述照明机构(70)设置在所述第一连接臂(42)和/或所述第二连接臂(43)上。
5.根据权利要求1所述的植物数据采集装置,其特征在于,所述支撑臂(30)包括第一杆体(31)、第二杆体(32)、第三杆体(36)、第七电机(34)、第八电机(35)以及第九电机(33),所述第七电机(34)设置在所述升降机构(20)上,所述第七电机(34)的输出轴与所述第一杆体(31)连接,以驱动所述第一杆体(31)相对所述升降机构(20)摆动,所述第八电机(35)设置在所述第一杆体(31)上,所述第八电机(35)的输出轴与所述第二杆体(32)连接,以驱动所述第二杆体(32)相对所述第一杆体(31)摆动,所述第九电机(33)设置在所述第二杆体(32)上,所述第九电机(33)的输出轴与所述第三杆体(36)连接,以驱动所述第三杆体(36)相对所述第二杆体(32)摆动。
6.根据权利要求1至5中任一项所述的植物数据采集装置,其特征在于,所述升降机构(20)包括立杆(21)、滑块(22)以及第十电机(23),所述滑块(22)可移动地设置在所述立杆(21)上,所述第十电机(23)驱动所述滑块(22)沿所述立杆(21)移动,所述支撑臂(30)与所述滑块(22)连接。
7.根据权利要求1至5中任一项所述的植物数据采集装置,其特征在于,所述植物数据采集装置还包括控制器,所述控制器设置在所述车体(10)内,所述控制器与所述升降机构(20)、所述车体(10)、所述支撑臂(30)、所述连接架(40)、所述位置采集机构(50)以及所述图像采集机构(60)电连接。
8.根据权利要求1至5中任一项所述的植物数据采集装置,其特征在于,所述行进机构(11)包括履带(111)。
技术总结
本技术提供了一种植物数据采集装置,包括:车体;升降机构;支撑臂;连接架;位置采集机构和图像采集机构。车体,具有行进机构;升降机构,设置在步行车上;支撑臂,支撑臂可伸展地设置,支撑臂的第一端连接在升降机构上;连接架,连接架与支撑臂的第二端连接;位置采集机构和图像采集机构,设置在连接架上。本申请的技术方案有效地解决了相关技术中的大型植株三维数据无法采集的问题。
技术研发人员:罗晓,宋成阳
受保护的技术使用者:北京大学现代农业研究院
技术研发日:20230414
技术公布日:2024/2/8
- 还没有人留言评论。精彩留言会获得点赞!