一种基于卡尔曼滤波算法的无人机定位装置
本技术涉及无人机定位领域,尤其是涉及一种基于卡尔曼滤波算法的无人机定位装置。
背景技术:
1、随着科技的发展,无人机行业的崛起,无人机的价格不断平民化,功能多样化,慢慢成为青少年手中的常规玩具,成年人工作中使用的必需品。无人机在飞行以及降落过程中,都需要了解其位置信息,以便进行操控,现有的无人机定位技术主要采用雷达定位技术;无线电定位技术;光电识别定位技术;被动声音定位技术等。
2、光电识别定位技术需提前训练图像库且易受环境影响,在黑夜中识别能力几乎丧失;雷达定位技术对目标较小的物体难以识别,且低空盲区大;无线电定位技术技术复杂,成本高且干扰信号多,不适合长时间值守;雷达、无线电、光电识别定位技术都需要发射探测信号,容易被目标捕获从而做出干扰;传统的声源定位技术存在识别误差大、易受环境影响、不适合长时间工作的缺点。
3、因此,有必要提供一种基于卡尔曼滤波算法的无人机定位装置,来解决上述问题。
技术实现思路
1、本实用新型的目的是提供一种基于卡尔曼滤波算法的无人机定位装置,解决传统声源定位技术存在识别误差大、易受环境影响、不适合长时间工作的问题。
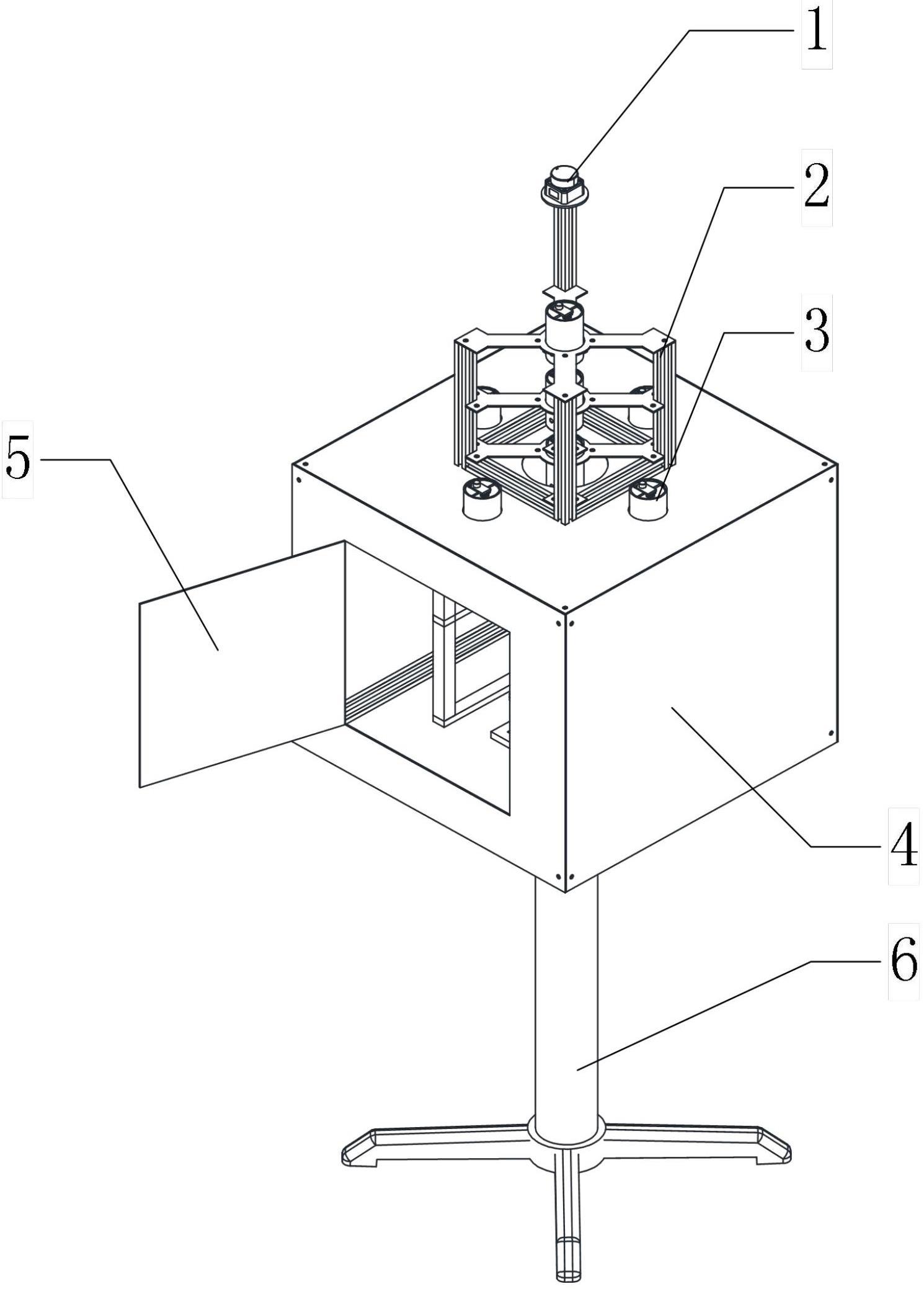
2、为实现上述目的,本实用新型提供了一种基于卡尔曼滤波算法的无人机定位装置,包括麦克风、麦克风阵列支架和金属外壳,所述麦克风与所述麦克风阵列支架构成麦克风阵列,所述麦克风阵列支架的顶部设置有激光雷达,所述麦克风和所述麦克风阵列支架均设置在所述金属外壳的顶部,所述金属外壳的底部与底部支架连接。
3、优选的,所述金属外壳的内部设置有绝缘支架,所述绝缘支架从上到下设置为三层,分别为第一绝缘支架、第二绝缘支架和第三绝缘支架,所述第一绝缘支架上设置有麦克风集成芯片,所述第二绝缘支架上设置有显示屏控制芯片,所述第三绝缘支架上设置有电池。
4、优选的,所述金属外壳包括顶板、底板和设置在所述顶板及所述底板之间的侧板,所述顶板和所述底板均设置成正方形结构,所述侧板包括前侧板、后侧板、左侧板和右侧板,所述前侧板和所述后侧板对称设置,所述左侧板和所述右侧板对称设置。
5、优选的,所述前侧板上设置有安全门,所述后侧板上设置有显示屏,所述底板上设置有电线预留孔。
6、优选的,所述显示屏与所述显示屏控制芯片连接,所述麦克风与所述麦克风集成芯片连接,所述显示屏控制芯片与所述麦克风集成芯片连接。
7、优选的,所述麦克风阵列设置为顶部阵列、中部阵列和底部阵列三层,所述顶部阵列和中部阵列均包括一个所述麦克风,所述底部阵列包括五个所述麦克风,五个所述麦克风呈十字形排列。
8、因此,本实用新型采用上述结构的一种基于卡尔曼滤波算法的无人机定位装置,具备以下有益效果;
9、(1)本实用新型底部支架可以使麦克风阵列置于更高的位置,以增大对无人机的监测范围。
10、(2)本实用新型麦克风阵列与激光雷达定位技术进行数据融合,能够提高定位结果精确度
11、(3)本实用新型金属外壳能够保护装置内部设备,以此来适应复杂多样的环境。
12、(4)本实用新型直接通过安全门对内部设备进行升级和检修。
13、(5)本实用新型使用声源定位技术监测和定位侵入无人机,适应各种环境,且该技术为接收声源信号,无需发射探测信号,不易被对方捕捉和干扰。
14、(6)本实用新型使用无人机声纹识别技术判别是否有无人机侵入,不受无人机大小影响。
15、(7)本实用新型引入卡尔曼滤波器,与激光雷达定位结果进行数据融合,提高定位结果精确度。
16、(8)本实用新型支持蜂窝式组网,扩大定位范围。
17、(9)本实用新型设计上位机软件,实时记录装置状态以及入侵无人机数据。
18、下面通过附图和实施例,对本实用新型的技术方案做进一步的详细描述。
技术特征:
1.一种基于卡尔曼滤波算法的无人机定位装置,包括麦克风、麦克风阵列支架和金属外壳,其特征在于:所述麦克风与所述麦克风阵列支架构成麦克风阵列,所述麦克风阵列支架的顶部设置有激光雷达,所述麦克风和所述麦克风阵列支架均设置在所述金属外壳的顶部,所述金属外壳的底部与底部支架连接。
2.根据权利要求1所述的一种基于卡尔曼滤波算法的无人机定位装置,其特征在于:所述金属外壳的内部设置有绝缘支架,所述绝缘支架从上到下设置为三层,分别为第一绝缘支架、第二绝缘支架和第三绝缘支架,所述第一绝缘支架上设置有麦克风集成芯片,所述第二绝缘支架上设置有显示屏控制芯片,所述第三绝缘支架上设置有电池。
3.根据权利要求1所述的一种基于卡尔曼滤波算法的无人机定位装置,其特征在于:所述金属外壳包括顶板、底板和设置在所述顶板及所述底板之间的侧板,所述顶板和所述底板均设置成正方形结构,所述侧板包括前侧板、后侧板、左侧板和右侧板,所述前侧板和所述后侧板对称设置,所述左侧板和所述右侧板对称设置。
4.根据权利要求3所述的一种基于卡尔曼滤波算法的无人机定位装置,其特征在于:所述前侧板上设置有安全门,所述后侧板上设置有显示屏,所述底板上设置有电线预留孔。
5.根据权利要求2所述的一种基于卡尔曼滤波算法的无人机定位装置,其特征在于:所述显示屏与所述显示屏控制芯片连接,所述麦克风与所述麦克风集成芯片连接,所述显示屏控制芯片与所述麦克风集成芯片连接。
6.根据权利要求1所述的一种基于卡尔曼滤波算法的无人机定位装置,其特征在于:所述麦克风阵列设置为顶部阵列、中部阵列和底部阵列三层,所述顶部阵列和中部阵列均包括一个所述麦克风,所述底部阵列包括五个所述麦克风,五个所述麦克风呈十字形排列。
技术总结
本技术公开了一种基于卡尔曼滤波算法的无人机定位装置,涉及无人机定位领域,包括麦克风、麦克风阵列支架和金属外壳,所述麦克风与所述麦克风阵列支架构成麦克风阵列,所述麦克风阵列支架的顶部设置有激光雷达,所述麦克风和所述麦克风阵列支架均设置在所述金属外壳的顶部,所述金属外壳的底部与底部支架连接。本技术通过麦克风阵列支架与麦克风构成麦克风阵列,麦克风阵列与激光雷达定位技术进行数据融合,通过微控制器优化的无人机声源定位算法、无人机声纹识别算法检测是否有无人机侵入;通过声源定位算法获取无人机的三维空间位置;通过卡尔曼滤波算法融合激光雷达定位结果,使得定位结果具有更高的准确性和稳定度。
技术研发人员:陈树烽,林宜锋,文成林,张杰,崔永锋,柯宗杰,陈静,陈冰琳,郑灿龙,陈静君,余广炼,黄嘉敏,林彤,蔺松鹤,麦正乐,李依妮,阮俞铭
受保护的技术使用者:广东石油化工学院
技术研发日:20230425
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!